1.本技术涉及能够抑制摩托车的倾倒、偏离车道、追随行进的困难化等且适当辅助骑手的驾驶的控制装置及控制方法。
背景技术:
2.作为以往的涉及摩托车的技术,有用于辅助骑手的驾驶的技术。
3.例如,专利文献1中公开了如下系统:基于由检测行进方向或实质上处于行进方向的障碍物的传感器装置检测的信息,向摩托车的骑手警告不适当地接近障碍物。
4.专利文献1:日本特开2009
‑
116882号公报。
5.但是,为了辅助骑手的驾驶,考虑利用自主巡航行进模式,前述自主巡航行进模式是使摩托车以其行动被至少部分地自动控制的状态持续地行进的行进模式。自主巡航行进模式中,例如,被控制成从摩托车至先行车辆的距离接近距离基准值。因此,有如下情况:自主巡航行进模式下,进行使摩托车执行不依赖骑手的操作地加速的动作即自主巡航加速动作的控制。这里,摩托车例如与具有4轮的车辆比较姿势容易不稳定。此外,转弯行进中,呈骑手自身的重心较大地改变的状态。因此,有如下问题:因为由于自主巡航加速动作而摩托车产生加速度,有导致摩托车的倾倒、偏离车道、追随行进的困难化等的可能。
技术实现要素:
6.本发明是以上述的问题为背景而作出的,得到能够抑制摩托车的倾倒、偏离车道、追随行进的困难化等且能够适当辅助骑手的驾驶的控制装置及控制方法。
7.本发明的控制装置是控制摩托车的行动的控制装置,具备取得部和执行部,前述取得部取得与前述摩托车的转弯行进中的姿势关联的状态量的变化率,前述执行部开始使前述摩托车执行自主巡航加速动作的控制模式,前述控制模式中,前述摩托车由于前述自主巡航加速动作产生的加速度即自动加速度被与前述变化率对应地控制。
8.本发明的控制方法是控制摩托车的行动的控制方法,具备执行步骤和取得步骤,在前述执行步骤中,开始使前述摩托车执行自主巡航加速动作的控制模式,在前述取得步骤中,取得与前述摩托车的转弯行进中的姿势关联的状态量的变化率,在前述控制模式中,前述摩托车由于前述自主巡航加速动作产生的加速度即自动加速度被与前述变化率对应地控制。
9.本发明的控制装置及控制方法中,使摩托车执行自主巡航加速动作的控制模式中,摩托车由于自主巡航加速动作产生的加速度即自动加速度被与和摩托车的转弯行进中的姿势关联的状态量的变化率对应地控制。由此,能够与摩托车的姿势对应地适当地控制自动加速度。由此,能够抑制摩托车的倾倒、偏离车道、追随行进的困难化等且适当辅助骑手的驾驶。
附图说明
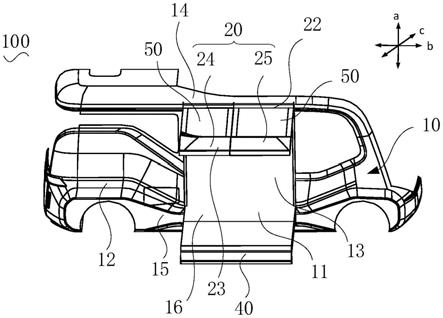
10.图1是表示搭载本发明的实施方式的行动控制系统的摩托车的概略结构的一例的示意图。
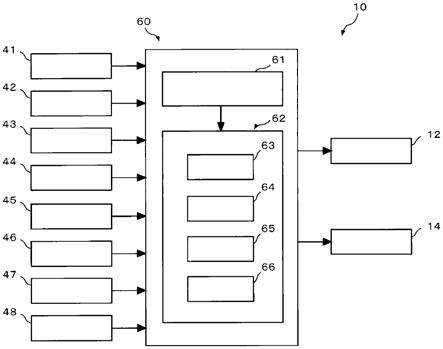
11.图2是表示本发明的实施方式的控制装置的功能结构的一例的框图。
12.图3是用于说明倾斜角的说明图。
13.图4是表示进行本发明的实施方式的控制装置的处理的流程的一例的流程图。
具体实施方式
14.以下,利用附图,对本发明的控制装置及控制方法进行说明。另外,以下,说明了摩托车为二轮机动车的情况,但摩托车也可以是三轮机动车等其他摩托车。此外,对行动控制系统驱动后轮的情况进行了说明,但行动控制系统也可以驱动前轮,此外,也可以将该两方驱动。
15.此外,以下说明的结构及动作等为一例,本发明的控制装置及控制方法不限于为这样的结构及动作等的情况。
16.此外,以下将相同的或类似的说明适当简化或省略。此外,各图中,关于相同的或类似的部件或部分,省略标注附图标记或标注相同的附图标记。此外,关于细节的构造,适当将图示简化或省略。
17.<行动控制系统的结构>对本发明的实施方式的行动控制系统10的结构进行说明。图1是表示搭载本发明的实施方式的行动控制系统10的摩托车100的概略结构的一例的示意图。图2是表示本发明的实施方式的控制装置60的功能结构的一例的框图。图3是用于对倾斜角进行说明的说明图。
18.如图1所示,行动控制系统10被搭载于摩托车100。摩托车100具备车身1、回转自如地保持于车身1的把手2、被与把手2一同回转自如地保持于车身1的前轮3、转动自如地保持于车身1的后轮4。
19.行动控制系统10例如具备操作部11、至少与操作部11联动地驱动的驱动源12、将由驱动源12产生的驱动力向后轮4传递的传递机构13、将车轮(前轮3、后轮4)制动的制动机构14。操作部11例如也可以是设置于摩托车100的把手2的节流把手,此外,也可以是设置于摩托车100的车身1的加速器踏板。驱动源12例如也可以是发动机,此外,也可以是马达等其他机构。作为制动机构14,也可以仅设置将前轮3制动的制动机构,此外,也可以仅设置将后轮4制动的制动机构,此外,也可以设置该两方。
20.如图1及图2所示,行动控制系统10例如具备操作量传感器41、驱动量传感器42、前轮旋转速度传感器43、后轮旋转速度传感器44、倾斜角传感器45、周围环境传感器46、操舵角传感器47、输入装置48。各传感器及输入装置48能够与控制装置60通信。控制装置60也可以是一个,此外,也可以分为多个。此外,控制装置60的一部分或全部例如也可以由个人计算机、微处理器单元等构成,此外,也可以由固件等能够更新的结构构成,此外,也可以是根据来自中央处理器等的指令被执行的程序模块等。
21.操作量传感器41检测操作部11的位移量,输出检测结果。位移量也可以作为旋转角度被检测,此外,也可以作为行程被检测。操作量传感器41也可以检测实质上能够换算成
操作部11的位移量的其他物理量。
22.驱动量传感器42检测摩托车100处产生的驱动量,输出检测结果。驱动量也可以被作为驱动源12的转速检测,此外,也可以作为被从驱动源12经由传递机构13传递至后轮4的转矩被检测。驱动量传感器42也可以检测实质上能够换算成摩托车100处产生的驱动量的其他物理量。
23.前轮旋转速度传感器43检测前轮3的旋转速度,输出检测结果。前轮旋转速度传感器43也可以检测实质上能够换算成前轮3的旋转速度的其他物理量。后轮旋转速度传感器44检测后轮4的旋转速度,输出检测结果。后轮旋转速度传感器44也可以检测实质上能够换算成后轮4的旋转速度的其他物理量。前轮旋转速度传感器43及后轮旋转速度传感器44被分别设置于前轮3及后轮4。
24.倾斜角传感器45检测摩托车100的倾斜角及倾斜角的角速度,输出检测结果。倾斜角例如相当于图3中所示的摩托车100相对于铅垂上方的摇摆方向的倾斜的角度θ。另外,摩托车100相对于铅垂上方的摇摆方向的倾斜在转弯行进中产生。作为倾斜角传感器45,具体地使用具备3轴的陀螺仪传感器及3方向的加速度传感器的惯性计量装置(imu)。倾斜角传感器455也可以检测实质上能够换算成摩托车100的倾斜角及倾斜角的角速度的其他物理量。倾斜角传感器45被设置于车身1。
25.周围环境传感器46检测摩托车100的周围环境,输出检测结果。例如,周围环境传感器46检测从摩托车100至在前方行进的先行车辆的距离作为周围环境。周围环境传感器46也可以检测实质上能够换算成至先行车辆的距离的其他物理量。作为周围环境传感器46,具体地,使用拍摄摩托车100的前方的照相机或能够检测至先行车辆的距离的测距传感器。周围环境传感器46被设置于车身1。
26.操舵角传感器47检测摩托车100的操舵角及操舵角的角速度,输出检测结果。操舵角传感器47也可以检测实质上能够换算成摩托车100的操舵角及操舵角的角速度的其他物理量。操舵角传感器47被设置于车身1。
27.输入装置48接受骑手进行的行进模式的选择操作,输出表示已接受的操作的信息。输入装置48作为行进模式接受至少选择自主巡航行进模式的选择操作。自主巡航行进模式是使摩托车100以其行动被至少部分地自动控制的状态持续地行进的行进模式。自主巡航行进模式下,例如,被控制成接近从摩托车100至先行车辆的距离接近距离基准值。距离基准值被设定成能够确保骑手的安全性值作为从摩托车100至先行车辆的距离。另外,自主巡航行进模式下,也可以被控制成摩托车100的车体速度接近速度基准值。速度基准值例如能够被骑手适当设定。摩托车100的车体速度能够被基于前轮3及后轮4的旋转速度算出。作为输入装置48,例如能够使用杆、按钮或触摸屏。输入装置48例如被设置成把手2。
28.控制装置60控制摩托车100的行动。控制装置60例如具备取得部61和执行部62。取得部61取得被从各传感器及输入装置48输出的信息,向执行部62输出。执行部62例如具备控制部63、加速要求判定部64、变化率判定部65、倾斜角判定部66。各判定部利用被从各传感器输出的信息执行各判定处理。执行部62在由骑手选择自主巡航行进模式时,开始与加速要求判定部64的判定结果对应地使摩托车100执行自主巡航加速动作的控制模式。此外,控制部63在控制模式中,与各判定部的判定结果对应地输出控制驱动源12的输出的指令,由此,控制摩托车100由于自主巡航加速动作而产生的加速度即自动加速度。此外,例如也
可以是,自主巡航加速动作在下坡被执行的状况下,控制部63通过输出减弱通过摩托车100的制动机构14对车轮(前轮3、后轮4)施加的制动力的指令,控制自动加速度。
29.控制部63具体地在控制模式中,对应于与摩托车100的转弯行进中的姿势关联的状态量的变化率地控制自动加速度。此外,控制部63也可以在控制模式中与摩托车100的倾斜角对应地控制自动加速度。另外,自动加速度的控制除了在自主巡航加速动作中的摩托车100处产生的自动加速度的控制,还包括允许或禁止自主巡航加速动作的控制。
30.也可以是,控制装置60具备储存元件,控制装置60进行的各处理中被使用的各基准值等信息被预先储存于储存元件。
31.另外,自主巡航行进模式中,不依赖骑手的操作地使摩托车100减速的动作即自主巡航减速动作,例如被与控制装置60分体化或一体化的其他控制装置控制。在自主巡航减速动作中的摩托车100处产生的减速度即自动减速度的控制能够通过其他控制装置控制例如由摩托车100的制动机构14对车轮(前轮3、后轮4)施加的制动力、驱动源12的输出等来实现。
32.<行动控制系统的动作>对本发明的实施方式的行动控制系统10的动作进行说明。图4是表示本发明的实施方式的控制装置60进行的处理的流程的一例的流程图。图4所示的控制流在选择自主巡航行进模式时被重复。图4中的步骤s110及步骤s190分别与控制流的开始及结束对应。另外,步骤s110中,在控制模式未开始的状态下开始控制流。
33.步骤s113中,加速要求判定部64判定是否有加速要求。判定成有加速要求的情况(步骤s113/是)下进入步骤s115。另一方面,判定成没有加速要求的情况(步骤s113/否)下重复步骤s113。加速要求判定部64例如在从摩托车100至先行车辆的距离超过距离基准值的情况下判定成有加速要求。另外,也可以是,自主巡航行进模式中被控制成摩托车100的车体速度接近速度基准值的情况下,加速要求判定部64在摩托车100的车体速度低于速度基准值的情况下判定成有加速要求。
34.另外,上述内容中,说明了由加速要求判定部64进行从摩托车100至先行车辆的距离与距离基准值的比较或摩托车100的车体速度和速度基准值的比较的情况,但这些比较也可以由与控制装置60不同的其他控制装置进行。该情况下,从其他控制装置向控制装置60输出表示这些比较的结果的信息或直接表示是否有加速要求的信息。由此,能够实现基于加速要求判定部64的判定。
35.步骤s115中,执行部62开始使摩托车100执行自主巡航加速动作的控制模式。
36.接着,步骤s117中,取得部61取得与摩托车100的转弯行进中的姿势关联的状态量的变化率。与摩托车100的转弯行进中的姿势关联的状态量例如包括倾斜角、倾斜角的角速度、操舵角或操舵角的角速度。
37.接着,步骤s119中,变化率判定部65判定与摩托车100的转弯行进中的姿势关联的状态量的变化率是否超过变化率基准值。判定成变化率超过变化率基准值的情况(步骤s119/是)下,进入步骤s127。另一方面,判定成变化率不超过变化率基准值情况(步骤s119/否)下,进入步骤s121。变化率基准值被设定成能够实现判定骑手是否有改变轨道的意思的值。
38.步骤s121中,取得部61取得摩托车100的倾斜角。
39.接着,步骤s123中,倾斜角判定部66判定摩托车100的倾斜角是否超过倾斜角基准值。判定成倾斜角超过倾斜角基准值的情况(步骤s123/是)下,进入步骤s127。另一方面,判定成倾斜角不超过倾斜角基准值的情况(步骤s123/否) 下,进入步骤s125。倾斜角基准值是能够实现判定由于摩托车100处产生的加速度引起摩托车100的倾倒、偏离车道、追随行进的困难化等可能性是否过大的值,例如,被与行进路面的摩擦系数或摩托车100的设计规格等对应地设定。
40.步骤s125中,控制部63允许自主巡航加速动作。若允许自主巡航加速动作,则控制部63使不依赖骑手的操作的加速度即自动加速度产生,使摩托车100执行自主巡航加速动作。例如,控制部63通过使摩托车100产生驱动力来产生自动加速度。另外,例如也可以是,自主巡航加速动作在下坡被执行的状况下,控制部63通过减弱在摩托车100处产生的制动力来产生自动加速度。制动力包括借助制动机构14对车轮(前轮3、后轮4)施加的制动力、发动机制动产生的制动力等。
41.例如,控制部63通过控制驱动源12的输出来控制使摩托车100产生的驱动力。具体地,控制部63算出自动加速度的目标值的基准值即基准目标加速度。例如,控制部63算出从摩托车100至先行车辆的距离和距离基准值的差越大 (换言之,摩托车100距先行车辆越远)则越大的值作为基准目标加速度。另外,控制部63也可以不取决于从摩托车100至先行车辆的距离与距离基准值的差而算出恒定的值作为基准目标加速度。并且,控制部63基于已算出的基准目标加速度确定目标加速度。例如,控制部63将对基准目标加速度乘以系数所得到的值作为目标加速度。并且,控制部63基于目标加速度确定驱动源12的转速的目标值即目标转速。并且,控制部63控制驱动源12的转速,使得与目标转速一致。由此,自动加速度被控制成与目标加速度一致。
42.另外,自主巡航行进模式中,摩托车100的车体速度被控制成接近速度基准值的情况下,控制部63例如算出摩托车100的车体速度与速度基准值的差越大则越大的值作为基准目标加速度。另外,控制部63也可以不取决于摩托车100的车体速度和速度基准值的差而算出恒定的值作为基准目标加速度。
43.另外,上述内容中,说明了基准目标加速度被控制部63算出的情况,但基准目标加速度也可以被与控制装置60不同的其他控制装置算出。该情况下,从其他控制装置向控制装置60输出表示基准目标加速度的信息。由此,能够实现基于控制部63的自动加速度的控制。
44.例如,控制部63在倾斜角大的情况下,与倾斜角小的情况下所执行的自主巡航加速动作比较,执行自动加速度小的自主巡航加速动作。具体地,控制部63将对基准目标加速度乘以倾斜角越大则越小的系数所得到的值确定为目标加速度,由此,控制自动加速度。
45.此外,例如,控制部63在与摩托车100的转弯行进中的姿势关联的状态量的变化率大的情况下,与变化率小的情况下所执行的自主巡航加速动作比较,执行自动加速度小的自主巡航加速动作。具体地,控制部63将对基准目标加速度乘以与摩托车100的转弯行进中的姿势关联的状态量的变化率越大则越小的系数所得到的值确定为目标加速度,由此,控制自动加速度。
46.控制部63也可以与倾斜角及和摩托车100的转弯行进中的姿势关联的状态量的变化率的双方对应地确定目标加速度。该情况下,控制部63例如将与倾斜角对应的系数及与
状态量的变化率对应的系数的双方乘以基准目标加速度所得到的值确定为目标加速度。
47.步骤s127中,控制部63禁止自主巡航加速动作。若自主巡航加速动作被禁止,则控制部63为使摩托车100与骑手的操作对应地产生加速度的通常状态。另外,也可以被控制成维持禁止前的车体速度的状态。
48.接着步骤s125或步骤s127,步骤s131中,加速要求判定部64判定是否有加速要求。若被判定成有加速要求的情况(步骤s131/是),则返回步骤s117。另一方面,若被判定成没有加速要求的情况(步骤s131/否),则进入步骤s133。
49.这样,步骤s131中,判定成有加速要求的情况(步骤s131/是)下,控制模式继续,重复从步骤s117至步骤s131的处理。控制模式被继续的情况下,控制部63与变化率判定部65及倾斜角判定部66进行的判定处理(步骤s119及步骤s123)的判定结果对应,将自主巡航加速动作被允许的状态和被禁止的状态适当切换。
50.自主巡航加速动作被允许的状态下,步骤s119及步骤123的判定结果均为否的情况下,控制部63使自主巡航加速动作被允许的状态继续。该情况下,例如,控制部63将自主巡航加速动作中的摩托车100处产生的自动加速度与自主巡航加速动作中所取得的倾斜角对应地控制。此外,例如,控制部63将自主巡航加速动作中的摩托车100处产生的自动加速度与自主巡航加速动作中所取得的与摩托车100的转弯行进中的姿势关联的状态量的变化率对应地控制。
51.自主巡航加速动作被允许的状态下,步骤s119及步骤s123的判定结果的至少一方为是的情况下,控制部63中止自主巡航加速动作被允许的状态,禁止自主巡航加速动作。例如,控制部63在自主巡航加速动作中所取得的与摩托车100的转弯行进中的姿势关联的状态量的变化率超过变化率基准值的情况下,中止自主巡航加速动作被允许的状态,禁止自主巡航加速动作。此外,例如,控制部63在自主巡航加速动作中所取得的倾斜角超过倾斜角基准值的情况下,中止自主巡航加速动作被允许的状态,禁止自主巡航加速动作。
52.自主巡航加速动作被禁止的状态下,步骤s119及步骤s123的判定结果的至少一方为是的情况下,控制部63使自主巡航加速动作被禁止的状态继续。
53.自主巡航加速动作被禁止的状态下,步骤s119及步骤s123的判定结果均为否的情况下,控制部63中止自主巡航加速动作被禁止的状态,允许自主巡航加速动作。例如,控制部63在步骤s119的判定结果为否的情况下,在自主巡航加速动作的禁止中所取得的倾斜角低于倾斜角基准值的情况下,中止自主巡航加速动作被禁止的状态,允许自主巡航加速动作。另外,也可以从图4中表示的控制流省略步骤s119的判定处理。该情况下,控制部63在自主巡航加速动作的禁止中所取得的倾斜角低于倾斜角基准值的情况下,中止自主巡航加速动作被禁止的状态,允许自主巡航加速动作。
54.步骤s133中,执行部62结束控制模式。
55.<行动控制系统的效果>对本发明的实施方式的行动控制系统10的效果进行说明。
56.行动控制系统10中,在使摩托车100执行自主巡航加速动作的控制模式下,对应于与摩托车100的转弯行进中的姿势关联的状态量的变化率地控制自动加速度。由此,能够与摩托车100的姿势对应地适当地控制自动加速度。由此,能够抑制摩托车100的倾倒、偏离车道、追随行进的困难化等且适当辅助骑手的驾驶。
57.优选地,行动控制系统10中,在控制模式下,与摩托车100的转弯行进中的姿势关联的状态量的变化率超过变化率基准值的情况下,自主巡航加速动作被禁止。由此,预想骑手具有改变轨道的意思的情况下,能够禁止自主巡航加速动作。由此,能够抑制与骑手的意思相反地产生自动加速度。因此,能够有效地抑制摩托车100的倾倒、偏离车道、追随行进的困难化等。
58.另外,也可以是,控制部63在控制模式下,关于骑手进行的摩托车100的操作的操作量超过操作量基准值的情况下,禁止自主巡航加速动作。骑手进行的摩托车100的操作例如包括加速器操作、制动器操作及离合器操作。操作量基准值被设定成,能够实现判定是否进行由骑手进行的摩托车100的操作的值。因此,操作量超过操作量基准值的情况下,禁止自主巡航加速动作,由此,能够抑制与骑手进行的摩托车100的操作相反地产生自动加速度。由此,能够有效地抑制摩托车100的倾倒、偏离车道、追随行进的困难化等。
59.此外,也可以是,控制部63在控制模式下,在与摩托车100的转弯行进中的姿势关联的状态量的变化率超过变化率基准值的情况下,与变化率未超过变化率基准值的情况比较使操作量基准值变小。由此,预想骑手有改变轨道的意思的情况下,能够提高检测骑手进行的摩托车100的操作的灵敏度,所以能够提高禁止自主巡航加速动作的切实性。
60.优选地,行动控制系统10中,控制模式下,与摩托车100的转弯行进中的姿势关联的状态量的变化率大的情况下,与变化率小的情况下被执行的自主巡航加速动作比较,自动加速度小的自主巡航加速动作被执行。这里,预想成,状态量的变化率越大,骑手有改变轨道的意思的可能性越高。因此,状态量的变化率大的情况下,与变化率小的情况下被执行的自主巡航加速动作比较,执行自动加速度小的自主巡航加速动作,由此,能够与骑手具有改变轨道的意思的可能性对应地适当地控制自动加速度。由此,能够抑制由于与骑手的意思相反地产生自动加速度导致的摩托车100的倾倒、偏离车道、追随行进的困难化等。
61.优选地,行动控制系统10中,控制模式下,自主巡航加速动作中的摩托车100产生的自动加速度被与和自主巡航加速动作中所取得的摩托车100的转弯行进中的姿势关联的状态量的变化率对应地控制。由此,能够将自主巡航加速动作中的摩托车100产生的自动加速度与自主巡航加速动作中的状态量的变化率伴随时间的经过的变化对应地适当控制。由此,能够有效地抑制由于与骑手的意思相反地产生自动加速度导致的摩托车100的倾倒、偏离车道、追随行进的困难化等。
62.优选地,用于自动加速度的控制的与摩托车100的转弯行进中的姿势关联的状态量包括摩托车100的倾斜角或倾斜角的角速度。由此,能够利用被从倾斜角传感器45输出的检测结果来控制自动加速度。因此,能够从行动控制系统10的结构省略其他传感器(例如,操舵角传感器47),所以能够使行动控制系统10简化。
63.优选地,行动控制系统10中,控制模式下,与摩托车100的倾斜角对应地控制自动加速度。由此,能够与摩托车100的姿势对应地更适当地控制自动加速度。由此,能够进一步增大抑制摩托车100的倾倒、偏离车道、追随行进的困难化等且适当辅助骑手的驾驶的效果。
64.优选地,行动控制系统10中,控制模式下,倾斜角大的情况下,与倾斜角小的情况下被执行的自主巡航加速动作比较,执行自动加速度小的自主巡航加速动作。这里,倾斜角越大,摩托车100的轮胎的接地面积越小。此外,摩托车100的轮胎的接地部分的摩擦特性有
具有倾斜角越大则关于进行方向越难产生摩擦力的特性的情况。因此,倾斜角越大,由于摩托车100产生加速度引起的摩托车100的倾倒的可能性越大。此外,摩托车100产生较大的倾斜角的状况下,难以维持其姿势,所以由于产生骑手未预期的较大的加速度,会发生摩托车100偏离车道、追随行进的困难化等。由此,倾斜角大的情况下,与倾斜角小的情况下被执行的自主巡航加速动作比较,自动加速度小的自主巡航加速动作被执行,由此,能够有效地抑制摩托车100的倾倒、偏离车道、追随行进的困难化等。
65.优选地,行动控制系统10中,控制模式下,自主巡航加速动作中的摩托车100产生的自动加速度被与自主巡航加速动作中所取得的倾斜角对应地控制。由此,能够将自主巡航加速动作中的摩托车100产生的自动加速度,与自主巡航加速动作中的倾斜角伴随时间的经过的变化对应地适当地控制。例如,能够伴随由于执行自主巡航加速动作而引起倾斜角减少,使自动加速度增大。由此,能够增大抑制摩托车100的倾倒、偏离车道、追随行进的困难化等且适当辅助骑手的驾驶的效果。
66.优选地,行动控制系统10中,控制模式下,倾斜角超过倾斜角基准值的情况下,禁止自主巡航加速动作。由此,由于摩托车100产生加速度而引起的摩托车100的倾倒、偏离车道、追随行进的困难化等可能性过大的情况下,能够禁止自主巡航加速动作。由此,能够有效地抑制摩托车100的倾倒、偏离车道、追随行进的困难化等。
67.优选地,行动控制系统10中,控制模式下,自主巡航加速动作的禁止中所取得的倾斜角低于倾斜角基准值的情况下,允许自主巡航加速动作。由此,即使自主巡航加速动作的禁止中,由于摩托车100产生加速度而引起的摩托车100的倾倒、偏离车道、追随行进的困难化等可能性也比较低的情况下,也能够适当地执行自主巡航加速动作。由此,能够增大适当辅助骑手的驾驶的效果。
68.本发明不限于实施方式的说明。例如,也可以仅实施实施方式的一部分,此外,也可以将实施方式的一部分彼此组合。此外,例如,也可以调换各步骤的顺序。
69.附图标记说明1车身、2把手、3前轮、4后轮、10行动控制系统、11操作部、12驱动源、13传递机构、14制动机构、41操作量传感器、42驱动量传感器、43前轮旋转速度传感器、44后轮旋转速度传感器、45倾斜角传感器、46周围环境传感器、47操舵角传感器、48输入装置、60控制装置、61取得部、62执行部、63控制部、64加速要求判定部、65变化率判定部、66倾斜角判定部、100摩托车。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。