1.本实用新型主要涉及动物行为控制技术领域,特指一种震动模式的动物控制机器人系统。
背景技术:
2.目前机器人广泛应用于安防、救援救灾、环境侦查等多个领域,机器人具有在恶劣环境下执行任务,机动性强,可实现远程遥控控制等优势,但在侦查监视与负载运输任务中,存在能耗大,续航时间较短,研发周期长,与人交互智能性不足以及环境适应能力不足等一系列制约等问题;而目前的动物机器人大多是基于脑机接口技术控制,即通过刺激动物脑部的不同区域产生相应的行为神经信号,将电极植入动物体内刺激不同肌肉或神经部位产生相应行为,植入式电极对动物有伤害,其准确性和稳定性仍是亟待解决的问题,且大多数为小型动物和无脊椎动物,距离走出实验室走向实用仍有较长的路要走。
技术实现要素:
3.针对现有技术存在的技术问题,本实用新型提供一种结构简单、能实现动物行为智能、可靠、稳定控制的震动模式的动物控制机器人系统。
4.为解决上述技术问题,本实用新型采用以下技术方案:
5.一种震动模式的动物控制机器人系统,包括头套和躯干套体;所述头套用于绑缚在被控对象的头部,所述躯干套体用于绑缚在被控对象的躯干部,所述头套上设有第一震动模块和声控模块,所述躯干套体上设有第二震动模块,所述第一震动模块和第二震动模块用于向被控对象施加震动刺激并控制被控对象的运动。
6.作为本实用新型的进一步改进:所述头套为左右对称结构,所述第一震动模块至少为一个,所述声控模块设置在所述第一震动模块上或设置在所述头套上。
7.作为本实用新型的进一步改进:所述第一震动模块为两个,所述第一震动模块对称设置在所述头套两侧壁上。
8.作为本实用新型的进一步改进:所述躯干套体为左右对称结构,所述第二震动模块至少为一个。
9.作为本实用新型的进一步改进:所述第二震动模块为两个,所述第二震动模块对称设置在所述躯干套体的两侧壁上。
10.作为本实用新型的进一步改进:还包括位姿识别装置,所述位姿识别装置设置于头套或者躯干套体上,所述位姿识别装置用于监测反馈被控对象的位置和姿态信息。
11.作为本实用新型的进一步改进:所述位姿识别装置设置于头套顶端的中部。
12.作为本实用新型的进一步改进:还包括环境识别与远程监控装置,所述环境识别与远程监控装置设置于头套或者躯干套体上,所述环境识别与远程监控装置用于识别和监控周围环境信息并进行反馈。
13.作为本实用新型的进一步改进:所述环境识别与远程监控装置设置于头套顶端的
中部。
14.作为本实用新型的进一步改进:所述控制装置包括控制模块、供电模块、远程通讯模块和定位模块;所述控制模块用于获取各模块的信息执行进行相应的控制指令;所述供电模块用于给控制系统供电;所述远程通讯模块用于实现控制模块与控制终端之间信息无线传输;所述定位模块用于对被控对象进行导航定位
15.与现有技术相比,本实用新型的优点在于:
16.1、本实用新型的震动模式的动物控制机器人系统,以动物为运动主体,根据动物习性与条件反射形成机制,通过施加震动物理刺激的方法,对动物的行为进行控制,充分利用了动物的运动技能,通过动物强大的环境适应能力突破现有无人系统的应用限制,同时使用智能控制系统代替人类对动物进行控制,为动物赋能。使动物机器人向目标运动,通过本实用新型可实现远程遥控控制的优势,实现对动物行进路线的自主决策与控制。
17.2、本实用新型的震动模式的动物控制机器人系统,头套和躯干套体设置震动模块,通过震动模块对被控对象施加震动刺激,被控对象受到震动刺激后进行前进、后退或者转弯等动作,当需要控制被控对象停止前进或者执行其他任务时,可通过声控模块传递指令至被控对象,经过训练的被控对象可根据声控模块中的相应声音指令执行相关动作,本实用新型充分利用了动物的运动技能,实现远程对动物赋能使其完成各项动作。
附图说明
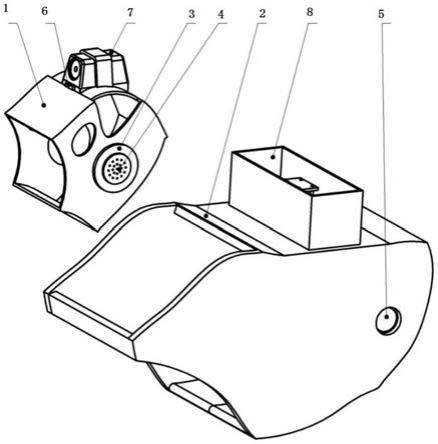
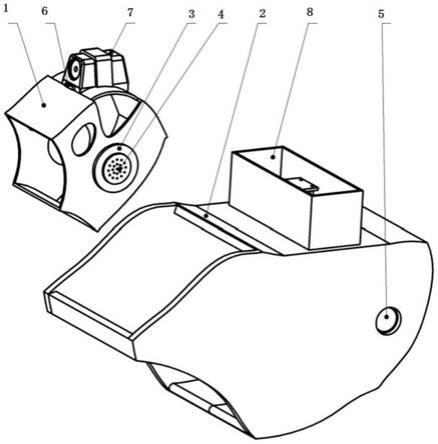
18.图1是本实用新型的结构示意图。
19.图2是本实用新型的控制装置的结构示意图。
20.图例说明:
21.1、头套;2、躯干套体;3、第一震动模块;4、声控模块;5、第二震动模块;6、位姿识别装置;7、环境识别与远程监控装置;8、控制装置;81、控制模块;82、供电模块;83、远程通讯模块;84、定位模块。
具体实施方式
22.以下将结合说明书附图和具体实施例对本实用新型做进一步详细说明。
23.如图1和2所示,本实用新型公开了一种震动模式的动物控制机器人系统,包括头套1和躯干套体2;头套1用于绑缚在控制对象的头部,躯干套体2用于绑缚在被控对象的躯干部,头套1上设有第一震动模块3和声控模块4,躯干套体2上设有第二震动模块5,第一震动模块3和第二震动模块5用于向被控对象施加震动刺激并控制被控对象运动。
24.本实用新型的震动模式的动物控制机器人系统,头套1和躯干套体2设置震动模块,通过震动模块对被控对象施加震动刺激,被控对象受到震动刺激后进行前进、后退或者转弯等动作,当需要控制被控对象停止前进或者执行其他任务时,可通过声控模块4传递指令至被控对象,经过训练的被控对象可根据声控模块4中的相应声音指令执行相关动作,本实用新型充分利用了动物的运动技能,实现远程对动物赋能使其完成各项动作
25.本实施例中,头套1为左右对称结构,第一震动模块3至少为一个,声控模块4设置在第一震动模块3上,其他实施例中,声控模块4也可以设置在头套1上。进一步的,在优先实施例中,第一震动模块3为两个,第一震动模块3对称设置在头套1的两侧壁上。
26.本实施例中,躯干套体2为左右对称结构,第二震动模块5至少为一个。进一步的,在优选实施例中,第二震动模块5为两个,第二震动模块5对称设置在躯干套体2的两侧壁上。
27.通过左右两边的震动刺激即可实现被控对象前进、后退、向左向右转弯等动作。
28.本实施例中,还包括位姿识别装置6,位姿识别装置6设置于头套1顶端的中部,在其他实施例中,位姿识别装置6设置在躯干套体2上,位姿识别装置6用于监测反馈被控对象的位置和姿态信息。
29.本实施例中,还包括环境识别与远程监控装置7,环境识别与远程监控装置7设置于头套1顶端的中部,在其他实施例中,环境识别与远程监控装置7可以设置在躯干套体2上,环境识别与远程监控装置7用于识别和监控周围环境信息并进行反馈。
30.本实施例中,还包括控制装置8,控制装置8包括控制模块81、供电模块82、远程通讯模块83和定位模块84;控制模块81用于获取各模块的信息执行进行相应的控制指令;供电模块82用于给控制系统供电;远程通讯模块83用于实现控制模块81与控制终端之间信息无线传输;定位模块84用于对被控对象进行导航定位。
31.具体应用时,人类通过控制终端(计算机)发出指令,通过远程通讯模块83将指令信息传输到控制模块81,进而驱动背部两侧的第二震动模块5,给被控对象施加震动刺激,控制对象受到力刺激后开始前进;前进过程中,通过环境识别与远程监控装置7获取周边环境信息,通过控制装置8内的远程通讯模块83传输到控制终端(计算机),以便人类能实时掌握现实环境;
32.当需要控制被控对象进行左转弯时,通过远程通讯模块83将指令发送到控制模块81,进而驱动头部左侧的第一震动模块3,对被控对象的左侧头部施加震动刺激,被控对象左侧头部受到力刺激后向左转弯;
33.当需要控制被控对象进行右转弯时,通过远程通讯模块83将指令发送到控制模块81,进而驱动头部右侧的第一震动模块3,对被控对象的右侧头部施加震动刺激,被控对象左侧头部受到力刺激后向右转弯;
34.当需要控制对象停止前进或执行其他特殊任务时,通过远程通讯模块83将指令发送到控制模块81,通过声控模块4传递给被控对象,被控对象经过训练后可根据相应的声音指令执行相关动作。
35.本实用新型的震动模式的动物控制机器人系统,以动物为运动主体,根据动物习性与条件反射形成机制,通过施加震动物理刺激的方法,对动物的行为进行控制,充分利用了动物的运动技能,通过动物强大的环境适应能力突破现有无人系统的应用限制,同时使用智能控制系统代替人类对动物进行控制,为动物赋能。使动物机器人向目标运动,通过本实用新型可实现远程遥控控制的优势,实现对动物行进路线的自主决策与控制。
36.以上仅是本实用新型的优选实施方式,本实用新型的保护范围并不仅局限于上述实施例,凡属于本实用新型思路下的技术方案均属于本实用新型的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理前提下的若干改进和润饰,应视为本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。