技术特征:
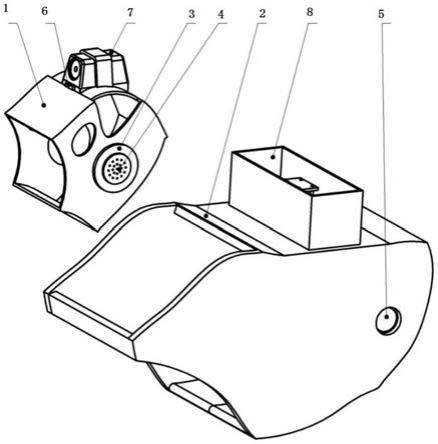
1.一种震动模式的动物控制机器人系统,其特征在于,包括头套(1)和躯干套体(2);所述头套(1)用于绑缚在被控对象的头部,所述躯干套体(2)用于绑缚在被控对象的躯干部,所述头套(1)上设有第一震动模块(3)和声控模块(4),所述躯干套体(2)上设有第二震动模块(5),所述第一震动模块(3)和第二震动模块(5)用于向被控对象施加震动刺激并控制被控对象运动。2.根据权利要求1所述的震动模式的动物控制机器人系统,其特征在于,所述头套(1)为左右对称结构,所述第一震动模块(3)至少为一个,所述声控模块(4)设置在所述第一震动模块(3)上或设置在所述头套(1)上。3.根据权利要求2所述的震动模式的动物控制机器人系统,其特征在于,所述第一震动模块(3)为两个,所述第一震动模块(3)对称设置在所述头套(1)的两侧壁上。4.根据权利要求1所述的震动模式的动物控制机器人系统,其特征在于,所述躯干套体(2)为左右对称结构,所述第二震动模块(5)至少为一个。5.根据权利要求4所述的震动模式的动物控制机器人系统,其特征在于,所述第二震动模块(5)为两个,所述第二震动模块(5)对称设置在所述躯干套体(2)的两侧壁上。6.根据权利要求1所述的震动模式的动物控制机器人系统,其特征在于,还包括位姿识别装置(6),所述位姿识别装置(6)设置在头套(1)或者躯干套体(2)上,所述位姿识别装置(6)用于监测反馈被控对象的位置和姿态信息。7.根据权利要求6所述的震动模式的动物控制机器人系统,其特征在于,所述位姿识别装置(6)设置于头套(1)顶端的中部。8.根据权利要求1所述的震动模式的动物控制机器人系统,其特征在于,还包括环境识别与远程监控装置(7),所述环境识别与远程监控装置(7)设置于头套(1)或者躯干套体(2)上,所述环境识别与远程监控装置(7)用于识别和监控周围环境信息并进行反馈。9.根据权利要求8所述的震动模式的动物控制机器人系统,其特征在于,所述环境识别与远程监控装置(7)设置于头套(1)顶端的中部。10.根据权利要求1至9任意一项所述的震动模式的动物控制机器人系统,其特征在于,还包括控制装置(8),所述控制装置(8)包括控制模块(81)、供电模块(82)、远程通讯模块(83)和定位模块(84);所述控制模块(81)用于获取各模块的信息执行进行相应的控制指令;所述供电模块(82)用于给控制系统供电;所述远程通讯模块(83)用于实现控制模块(81)与控制终端之间信息无线传输;所述定位模块(84)用于对被控对象进行导航定位。
技术总结
本实用新型公开了一种震动模式的动物控制机器人系统,包括头套和躯干套体;头套用于绑缚在被控对象的头部,躯干套体用于绑缚在被控对象的躯干部,头套上设有第一震动模块和声控模块,躯干套体上设有第二震动模块,第一震动模块和第二震动模块用于向被控对象施加震动刺激并控制被控对象运动。本实用新型能实现动物行为智能、可靠、稳定的控制。稳定的控制。稳定的控制。
技术研发人员:马宏绪 韦庆 安宏雷 成岳华 郁军伟 孙磊
受保护的技术使用者:中国人民解放军国防科技大学
技术研发日:2021.03.19
技术公布日:2021/11/28
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。