1.本实用新型涉及焊接设备技术领域,具体为一种三角激光弧线焊缝定位装置。
背景技术:
2.焊接是建筑业、造船业等制造领域的关键工艺,是保障生产质量的重要环节,目前dsp焊接裂缝自动定位系统和plc焊接裂缝自动定位系统是最长采用的焊接用定位装置,但是,现有的焊接定位装置在使用时还存在以下问题:
3.1、现有技术中,dsp焊接裂缝自动定位系统和plc焊接裂缝自动定位系统虽然能够实现对焊接裂缝的定位,但是由于测量所得裂缝焊接信息不够精准,焊接位置调整不及时,导致定位耗时长、不利于现场实时性应用;
4.2、现有技术中,dsp焊接裂缝自动定位系统和plc焊接裂缝自动定位系统均缺乏现有的防护措施,焊接过程中飞溅的杂质易损坏传感器头,使用不便。
技术实现要素:
5.本实用新型提供了一种三角激光弧线焊缝定位装置,具备实现焊接位置的快速定位,跟踪精度高,确保实际焊缝跟踪与位置信息传感一致,能够有的对图像采集机构进行防护的优点,以解决测量所得裂缝焊接信息不够精准,焊接位置调整不及时,定位耗时长、不利于现场实时应用,同时缺乏相应的防护措施,易损坏的问题。
6.为实现实现焊接位置的快速定位,跟踪精度高,确保实际焊缝跟踪与位置信息传感一致,能够有的对图像采集机构进行防护的目的,本实用新型提供如下技术方案:一种三角激光弧线焊缝定位装置,包括工控机,所述工控机上表面设置有触摸显示屏,所述工控机通过运动控制卡与行走机构电性连接,所述行走机构上固定安装有安装板,所述安装板的下表面右侧边缘位置固定安装有焊枪,所述安装板的上表面右侧边缘位置固定安装有图像采集机构,所述图像采集机构包括微控制器、激光发射器、ccd图像传感器和扩展卡,所述微控制器、激光发射器和ccd图像传感器均固定安装于安装板上表面,且激光发射器和ccd图像传感器均与微控制器电性连接,所述微控制器内设置有扩展卡,所述图像采集机构相对应的安装板上表面设置有防护机构。
7.作为本实用新型的一种优选技术方案,所述运动控制卡采用pmac运动控制卡,所述运动控制卡通过以太网与工控机电性连接。
8.作为本实用新型的一种优选技术方案,所述工控机通过wifi网络与远程移动端无线连接。
9.作为本实用新型的一种优选技术方案,所述行走机构包括第一丝杆滑台、第二丝杆滑台、安装架和第三丝杆滑台,所述第一丝杆滑台上表面固定安装有第二丝杆滑台,所述第二丝杆滑台的右侧面通过安装架固定安装有第三丝杆滑台,所述第三丝杆滑台与安装板下表面固定连接。
10.作为本实用新型的一种优选技术方案,所述第一丝杆滑台固定安装于底座上表
面。
11.作为本实用新型的一种优选技术方案,所述防护机构包括电动伸缩杆、连接杆和防护板,所述电动伸缩杆固定安装于安装板上表面,所述电动伸缩杆的活塞上表面固定安装有连接杆,所述连接杆的右侧面固定安装有防护板,且防护板将激光发射器和ccd图像传感器右侧面遮挡。
12.与现有技术相比,本实用新型提供了一种三角激光弧线焊缝定位装置,具备以下有益效果:
13.1、该三角激光弧线焊缝定位装置,通过设置图像采集机构对焊缝,再通过工控机使行走机构带动焊枪移动,实现焊接位置的快速定位,且图像采集机构与目标之间的距离越近,测量的精度也越高,易操作,跟踪精度高,确保实际焊缝跟踪与位置信息传感一致。
14.2、该三角激光弧线焊缝定位装置,通过设置防护机构对图像采集机构进行保护,避免焊接中飞溅的杂质损坏图像采集机构,能够有的对图像采集机构进行防护,提高使用寿命。
附图说明
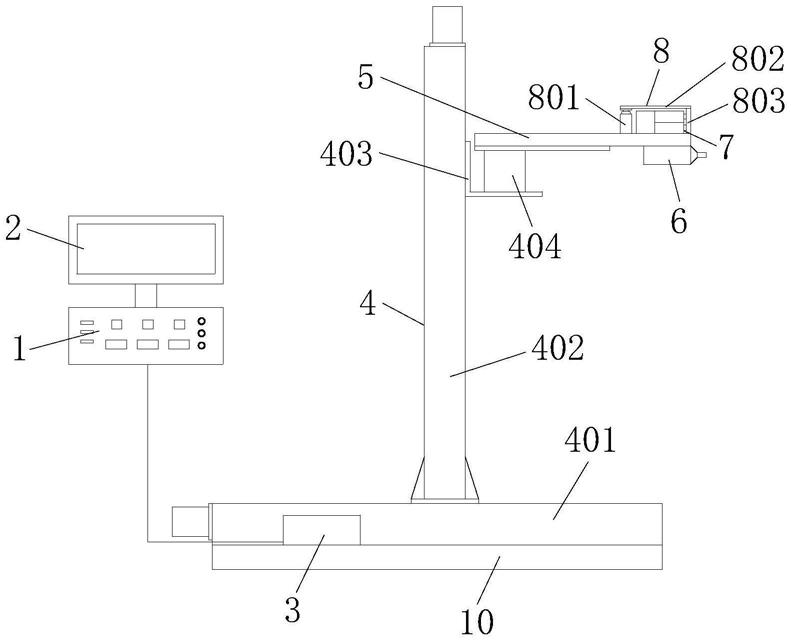
15.图1为本实用新型的结构示意图;
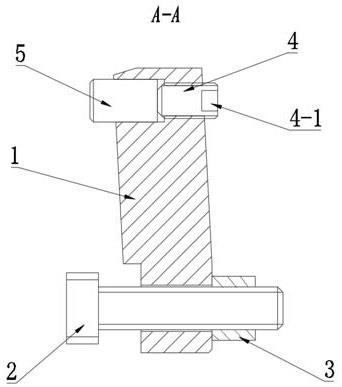
16.图2为本实用新型的控制系统示意图。
17.图中:1、工控机;2、触摸显示屏;3、运动控制卡;4、行走机构;401、第一丝杆滑台;402、第二丝杆滑台;403、安装架;404、第三丝杆滑台;5、安装板;6、焊枪;7、图像采集机构;701、微控制器;702、激光发射器;703、ccd图像传感器;704、扩展卡;8、防护机构;801、电动伸缩杆;802、连接杆;803、防护板;9、远程移动端;10、底座。
具体实施方式
18.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
19.请参阅图1与图2,本实用新型公开了一种三角激光弧线焊缝定位装置,包括工控机1,所述工控机1上表面设置有触摸显示屏2,所述工控机1通过运动控制卡3与行走机构4电性连接,所述行走机构4上固定安装有安装板5,所述安装板5的下表面右侧边缘位置固定安装有焊枪6,所述安装板5的上表面右侧边缘位置固定安装有图像采集机构7,所述图像采集机构7包括微控制器701、激光发射器702、ccd图像传感器703和扩展卡704,所述微控制器701、激光发射器702和ccd图像传感器703均固定安装于安装板5上表面,且激光发射器702和ccd图像传感器703均与微控制器701电性连接,所述微控制器701内设置有扩展卡704,激光发射器702发出激光束,然后,该光束投射到物体表面便形成光条,接着光条中部分散射光经由透镜进行集聚;最终集聚光束成像于ccd图像传感器703,根据几何结构光学理论可知,如果被测物体发生运动或被测物体表面的高度发生了变化,则必将导致散射光速入射角发生一定改变,从而导致ccd图像传感器703上的成像也产生一定的位移,这表明,被测物体的三维运动信息完全可以从二维ccd图像传感器703中进行提取,所述图像采集机构7相
对应的安装板5上表面设置有防护机构8。
20.具体的,所述运动控制卡3采用pmac运动控制卡3,所述运动控制卡3通过以太网与工控机1电性连接。
21.本实施例中,运动控制卡3控制过程更加精准,使用更加方便。
22.具体的,所述工控机1通过wifi网络与远程移动端9无线连接。
23.本实施例中,远程移动端9通过wifi网络方便对工控机1进行控制,方便使用者站在远处使用,使用安全。
24.具体的,所述行走机构4包括第一丝杆滑台401、第二丝杆滑台402、安装架403和第三丝杆滑台404,所述第一丝杆滑台401上表面固定安装有第二丝杆滑台402,所述第二丝杆滑台402的右侧面通过安装架403固定安装有第三丝杆滑台404,所述第三丝杆滑台404与安装板5下表面固定连接。
25.本实施例中,第一丝杆滑台401带动第二丝杆滑台402左右移动,第二丝杆滑台402通过安装架403带动第三丝杆滑台404上下移动,第三丝杆滑台404通过安装板5带动焊枪6与图像采集机构7前后移动,实现焊枪6与图像采集机构7左右、上下和前后的移动。
26.具体的,所述第一丝杆滑台401固定安装于底座10上表面。
27.本实施例中,底座10方便对第一丝杆滑台401进行安装,使第一丝杆滑台401安装更加稳定。
28.具体的,所述防护机构8包括电动伸缩杆801、连接杆802和防护板803,所述电动伸缩杆801固定安装于安装板5上表面,所述电动伸缩杆801的活塞上表面固定安装有连接杆802,所述连接杆802的右侧面固定安装有防护板803,且防护板803将激光发射器702和ccd图像传感器703右侧面遮挡。
29.本实施例中,电动伸缩杆801活塞带动连接杆802向下移动,连接杆802带动防护板803向下移动,使防护板803对图像采集机构7的右侧面进行防护。
30.本实用新型的工作原理及使用流程:在使用时,通过图像采集机构7中激光发射器702发射一束扇形的线激光照射带待焊接的基准面上,并在空间形成一个光平面即基准面,基准面在对应的ccd图像传感器703上成像,微控制器701利用待测基准面距离与ccd图像传感器703成像位置的对应关系,可以检测到焊缝的深度和宽度数据,定位出焊接位置以及大小,并将信息传递给工控机1,通过工控机1使行走机构4中第一丝杆滑台401带动第二丝杆滑台402左右移动,第二丝杆滑台402通过安装架403带动第三丝杆滑台404上下移动,第三丝杆滑台404通过安装板5带动焊枪6与图像采集机构7前后移动,实现焊枪6与图像采集机构7左右、上下和前后的移动,带动焊枪6移动至指定位置,实现焊接位置的快速定位,且图像采集机构7与目标之间的距离越近,测量的精度也越高,易操作,跟踪精度高,确保实际焊缝跟踪与位置信息传感一致,在需要焊接时,通过防护机构8中电动伸缩杆801活塞带动连接杆802向下移动,连接杆802带动防护板803向下移动,使防护板803对图像采集机构7的右侧面进行防护,避免焊接中飞溅的杂质损坏图像采集机构7,能够有的对图像采集机构7进行防护,提高使用寿命,图像采集时,防护板803打开,可以开始图像采集。
31.综上所述,该三角激光弧线焊缝定位装置,实现焊接位置的快速定位,且与目标之间的距离越近,测量的精度也越高,易操作,跟踪精度高,确保实际焊缝跟踪与位置信息传感一致,能够有的对图像采集机构7进行防护,提高使用寿命。
32.需要说明的是,在本文中,诸如术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
33.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。