1.本实用新型涉及服饰的物流管理技术领域,特别是涉及一种用于服饰分拣的分拣机器人及服饰仓储系统。
背景技术:
2.随着电子商务的爆炸性增长,电商的仓储分拣工作量也大幅增加。目前,很多电商仓库中都配备了自动化设备,以实现无人化搬运物品,从而降低人工成本,缩短仓储物品出库时间,提高仓储分拣效率。
3.但是在服装行业,针对有特殊要求的吊挂类服饰,目前仍然以人工搬运和拣选为主,自动化程度低、效率慢,出错率较高。
技术实现要素:
4.发明目的:为了克服现有技术中存在的不足,本实用新型提供一种可对吊挂服饰进行分拣、管理的用于服饰分拣的分拣机器人及服饰仓储系统。
5.技术方案:为实现上述目的,本实用新型的一种用于服饰分拣的分拣机器人,其包括移动座、临时挂架以及服饰转移机构;所述移动座为轮式移动底盘或穿梭车;所述临时挂架用于挂存吊挂服饰;所述服饰转移机构用于从外部获取吊挂服饰并将吊挂服饰转移至所述临时挂架,或者用于将所述临时挂架上的吊挂服饰转移出去以使吊挂服饰脱离所述分拣机器人。
6.进一步地,所述服饰转移机构包括伸缩架与直线运动执行装置,伸缩架能够相对于所述移动座作伸缩运动以转移吊挂服饰;直线运动执行装置用于驱动所述伸缩架运动。
7.进一步地,所述伸缩架上形成有阵列设置的凹槽;且所述伸缩架还能够相对于所述移动座作可控升降运动。
8.进一步地,其还包括存储架,其具备至少一个存储位,每个所述存储位均具备用于挂存吊挂服饰的存储挂架;当所述存储架包含多个存储位,所述服饰转移机构与所述临时挂架两者可整体相对于所述存储架作可控运动。
9.进一步地,所述服饰转移机构与所述临时挂架两者能够相对于所述存储架可控旋转。
10.进一步地,所述服饰转移机构与所述临时挂架均安装在旋转座上,所述旋转座安装在升降座上,所述旋转座被旋转电机驱动相对于所述升降座旋转,所述升降座被同步带驱动装置驱动相对于移动座升降。
11.进一步地,其还包括补偿驱动装置;所述补偿驱动装置与所述临时挂架驱动连接,以驱动所述临时挂架作平移运动,使得所述临时挂架能够与所述存储挂架或外部的挂架对接。
12.一种服饰仓储系统,其包括:
13.上述的分拣机器人;
14.服饰仓储架,所述服饰仓储架上具备多个服饰仓储位,每个所述服饰仓储位均具备服饰挂架;以及
15.控制系统,其能够调度所述用于服饰分拣的分拣机器人运动并执行取、放吊挂服饰的作业。
16.进一步地,其还包括装卸架;所述吊挂服饰分拣机器人能够将由所述服饰仓储架获取的吊挂服饰并将获取的吊挂服饰卸货至所述装卸架,或从所述装卸架获取吊挂服饰并将获取的吊挂服饰运送至所述服饰仓储架。
17.有益效果:本实用新型的用于服饰分拣的分拣机器人及服饰仓储系统,通过控制服饰转移机构运转,可实现服饰仓储架与临时挂架之间吊挂服饰的转移,通过控制移动座运动,可实现吊挂服饰的运输,如此,可实现对吊挂服饰的全自动化出、入库,分拣效率高,节约人力成本。
附图说明
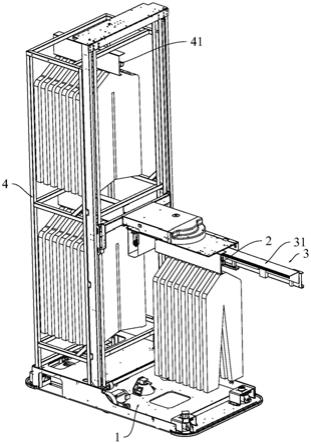
18.附图1为用于服饰分拣的分拣机器人的外形结构图;
19.附图2为临时挂架的结构图;
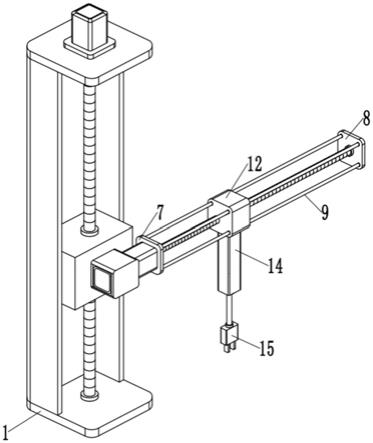
20.附图3为服饰转移机构及其周围部件的第一视角组合结构图;
21.附图4为附图3中a部分的放大结构图;
22.附图5为服饰转移机构及其周围部件的第二视角组合结构图;
23.附图6为载有吊挂服饰的用于服饰分拣的分拣机器人的状态图;
24.附图7为服饰仓储系统的正视图;
25.附图8为服饰仓储系统的俯视图;
26.附图9为服饰仓储架的结构图。
27.图中:1
‑
移动座;2
‑
临时挂架;21
‑
锥形体;3
‑
服饰转移机构;31
‑
伸缩架;311
‑
凹槽;32
‑
直线运动执行装置;33
‑
升降执行装置;34
‑
补偿驱动装置;4
‑
存储架;41
‑
存储挂架;5
‑
服饰仓储架;51
‑
服饰挂架;6
‑
装卸架;61
‑
装卸挂架;7
‑
同步带驱动装置;8
‑
旋转座;9
‑
升降座;10
‑
旋转电机。
具体实施方式
28.下面结合附图对本实用新型作更进一步的说明。
29.本实用新型中述及的吊挂服饰为带有衣架(带有挂钩形式的衣架)的服饰。
30.如附图1与附图6所示的用于服饰分拣的分拣机器人,其包括移动座1、临时挂架2以及服饰转移机构3;其中,所述移动座1能够可控移动,移动座1的形态可以是轮式移动底盘或穿梭车等可移动的结构,本实施例中,移动座1为六轮机器人底盘,其包括两个驱动轮与四个从动轮,两个驱动轮位于底盘的中部两侧,四个从动轮位于底盘四角位置;临时挂架2上能够挂存吊挂服饰,其用于临时存储吊挂服饰,以使得被转运的吊挂服饰随着移动座1运动时也保持着吊挂形态;服饰转移机构3用于从外部的服饰仓储架5或装卸架6获取吊挂服饰并将吊挂服饰转移至所述临时挂架2,或者用于将所述临时挂架2上的吊挂服饰转移至外部的服饰仓储架5或装卸架6以使吊挂服饰脱离所述分拣机器人。上述服饰仓储架5以及装卸架6上分别具备用于挂存吊挂服饰的服饰挂架51以及装卸挂架61。临时挂架2、服饰挂
架51以及装卸挂架61均为杆状,吊挂服饰在三种挂架上均为等距直线排列。
31.具体地,如附图3与附图5所示,所述服饰转移机构3包括伸缩架31与直线运动执行装置32,其中,伸缩架31能够相对于所述移动座1作伸缩运动以转移吊挂服饰;直线运动执行装置32用于驱动所述伸缩架31运动。本实施例中,直线运动执行装置32为同步带传动组件,通过同步带驱动伸缩架31运动。
32.由于吊挂服饰在各类挂架上均为等距直线阵列排列的形态,为了方便精确分离出所需数量的吊挂服饰,如附图4所示,所述伸缩架31上形成有直线阵列排列的凹槽311,且所述伸缩架31还能够相对于所述移动座1作可控升降运动,伸缩架31的升降运动由升降执行装置33驱动,本实施例中,升降执行装置33为电动推杆;临时挂架2、服饰挂架51以及装卸挂架61的顶部均设置有沿各自长度方向延伸的直槽,如附图2所示为临时挂架2的结构图。通过上述结构,当需要分离特定数量的吊挂服饰时,首先,根据需求数量计算伸缩架31的平移量;然后,控制直线运动执行装置32运转使伸缩架31向目标方向移动上述平移量的距离,其中,目标方向根据分拣机器人所需执行的任务类型确定;再然后,控制升降执行装置33运转使伸缩架31下降至低位(初始状态下伸缩架31处于高位),以使得需要被转移的每个吊挂服饰的衣架的挂钩顶部分别置于一个单独的凹槽311中,此时,伸缩架31的下端置于挂架的直槽中;最后,控制直线运动执行装置32运转使伸缩架31向与目标方向相反的方向平移,转移需要被移动的吊挂服饰。
33.优选地,分拣机器人还包括存储架4,存储架4具备至少一个存储位,本实施例中,为了提升分拣机器人的运输能力,存储架4具有多个存储位,所有存储位在高度方向上直线阵列排列,每个所述存储位均具备用于挂存吊挂服饰的存储挂架41,存储挂架41的形态与上述临时挂架2、服饰挂架51以及装卸挂架61一致,且存储挂架41的顶部也具有直槽。此时,为了使服饰转移机构3能够转移每个存储位的吊挂服饰,服饰转移机构3与临时挂架2两者可整体相对于移动座1作可控升降运动,其可控升降运动由同步带驱动装置7驱动;当需要临时挂架2与哪个存储位之间进行转移吊挂服饰,同步带驱动装置7就将其驱动哪个存储位所在位置。
34.优先地,所述服饰转移机构3与临时挂架2能够整体相对于所述移动座1可控旋转,如此,服饰转移机构3可朝各个方向执行吊挂服饰的转移任务,不需要通过控制移动座1运转以调节服饰转移机构3的位姿,可减少控制难度。具体地,服饰转移机构3与临时挂架2安装在同一旋转座8上,旋转座8安装在升降座9上,旋转座8被旋转电机10驱动相对于升降座9旋转,升降座9被同步带驱动装置7驱动相对于移动座1升降。
35.由于上述旋转座8能够带动服饰转移机构3与临时挂架2相对于所述移动座1可控旋转,三者(旋转座8、服饰转移机构3与临时挂架2)旋转时整体的最大回转半径取决于随旋转座8运动的所有机构以及旋转座8本身这些机构整体离回转中心最远的点,而临时挂架2的端部一般不是结构整体离回转中心最远的点,因此为了防止结构整体回转时与分拣机器人外部的装置发生干涉,需要保证安全距离,这就导致临时挂架2旋转到位后其端部与其他挂架之间会有缝隙,在两者之间转移吊挂服饰时会导致吊挂服饰从两个挂架之间的缝隙中掉落,为了防止该情况发生,分拣机器人还包括补偿驱动装置34;所述补偿驱动装置34与所述临时挂架2驱动连接,以驱动所述临时挂架2作平移运动,使得所述临时挂架2可与所述存储挂架41或外部的服饰挂架51或装卸挂架61对接。补偿驱动装置34为电动推杆或其他形式
的直线运动驱动结构。存储挂架41、服饰挂架51及装卸挂架61均为中空管状结构,临时挂架2的端部具有锥形体21,补偿驱动装置34驱动临时挂架2与其他类别的挂架对接时,锥形体21可先插入其他挂架的端孔内起到导向纠偏的作用。
36.本实用新型还提供了一种服饰仓储系统(以下部分相关名称简称为:分拣系统),如附图7
‑
8所示,其包括上述的分拣机器人,还包括服饰仓储架5与控制系统,服饰仓储架5的结构如附图9所示,其上具备多个呈方形阵列排布的服饰仓储位,每个所述服饰仓储位均具备服饰挂架51;控制系统能够调度所述分拣机器人运动并执行取、放吊挂服饰的作业。此处,控制系统为一个统称,其可以是一个总的控制中心,控制中心统管所有分拣机器人的运行动作;控制系统也可以是多个可相互通信的控制单元的合集,如每个分拣机器人分别搭载有控制模块,且所有控制模块均可与一个总控模块通信,则此时控制系统是总控模块与所有控制单元的合称。下述描述的方法过程都是以控制系统这个合称为执行对象进行描述。
37.如附图8所示,上述服饰仓储架5成排设置,服饰仓储架5之间具有供分拣机器人穿行的巷道,服饰仓储架5的可进出服饰的一侧正对巷道,分拣机器人在巷道内时可对两侧的服饰仓储架5的服饰仓储位执行取出服饰或将服饰入库的操作。
38.优选地,分拣系统还包括装卸架6;所述分拣机器人能够将由所述服饰仓储架5获取的吊挂服饰卸货至所述装卸架6,或从所述装卸架6获取吊挂服饰将其运送至所述服饰仓储架5。装卸架6的结构与服饰仓储架5的结构基本一致。
39.本实用新型的用于服饰分拣的分拣机器人及服饰仓储系统,通过控制服饰转移机构运转,可实现服饰仓储架与临时挂架之间吊挂服饰的转移,通过控制移动座运动,可实现吊挂服饰的运输,如此,可实现对吊挂服饰的全自动化出、入库,分拣效率高,节约人力成本。
40.以上所述仅是本实用新型的优选实施方式,应当指出:对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。