:
1.本发明涉及农业机械技术领域,指一种可用于收获马铃薯、番薯等地下块状作物的小型电动马铃薯收获机及收获装置。
背景技术:
2.由于马铃薯种植环境要求较低、产量高、淀粉含量高,马铃薯一直是我国重要的一种粮食作物。另外,由于我国人口基数较大,并且实际耕地使用面积越来越少的情况下,进一步加强提高马铃薯种植技术,大力推广马铃薯种植产业发展,对从根本上解决我国粮食生产问题,有效推进我国现代化农业生产建设有着极其重要的促进作用。
3.我国的马铃薯种植主要在22个省市或地区,其中主要分布在内蒙古、贵州、甘肃、黑龙江、陕西等省份,这些种植地区中,除了少数的大规模种植地区实现机械化规模种植以外,许多种植地区仍是小规模半机械化、甚至是人工种植为主。造成这一现象的一个重要原因在于,许多种植地区位于一些山区或丘陵地带。对于这种小面积种植的马铃薯,现有的许多收获马铃薯的机器很难在这些区域发挥出应有的实力。另外,现在的马铃薯收获机基本都是针对适用于大面积平原地带种植所研发生产的大型机械。对于现有的山区、丘陵地带,种植面积不大的马铃薯种植地,传统的马铃薯收获机根本无法投入使用。
4.经过对目前中国专利数据库检索发现,目前的马铃薯收获机并没有针对专门针对山区、丘陵地带而研发的相关产品。举例说明如下:
5.对比专利1:
6.专利名称:一种马铃薯脱土收获总成
7.专利申请人:上海萩狩农业科技发展有限公司
8.专利公开日:2021年5月11日
9.本专利技术方案要点是包括车架,车架前端设有去除马铃薯茎叶的除叶装置;所述车架下方设有挖掘马铃薯同时进行脱土的挖掘装置,挖掘装置位于除叶装置后方,挖掘装置包括能够在竖直方向移动的倾斜铲土部件进而对土壤不同深度进行疏松的松土组件和通过旋转的圆盘部件与土壤相抵进而通过离心力将马铃薯从土壤中甩出的旋转挖掘组件;所述车架后面有输送马铃薯同时进行二次脱土的清洁装置,清洁装置包括通过输送带部件传动进而带动马铃薯移动的运送组件和通过固定的毛刷部件与移动的马铃薯相抵进而对其二次脱土的脱土组件,技术效果是将马铃薯收获并进行二次脱土的优点。
10.对比专利2:
11.专利名称:马铃薯收获筛选一体机
12.专利申请人:河北省农林科学院旱作物农业研究所
13.专利公开日:2020年4月17日
14.本专利为一种马铃薯收获筛选一体机。其主要技术特征为:包括带有牵引器、行走轮的机架,机架前端设置有推土铲,推土铲后端设置有活动传送板,机架的前部设置有带有输送杆的输送带,输送带前低后高设置,输送带前端与推土铲相匹配,与输送带中部位置相
匹配处设置有风扇型振动辊,所述机架的后部设置有筛选链条,筛选链条上设置有多个筛选杆,筛选链条前低后高设置,筛选链条前端与输送带后端相匹配,筛选链条左侧下面设置有向右下方倾斜的小马铃薯拨板,筛选链条后侧设置有向左下方倾斜的大马铃薯拨叉。本发明所提供的马铃薯收获筛选一体机,收货时,小马铃薯、大马铃薯分别成行,实现了马铃薯收获与筛选的一体化。
15.对比专利3:
16.专利名称:马铃薯收获机
17.专利申请人:杭州和源园艺有限公司
18.专利公开日:2020年1月14日
19.本专利提供了一种马铃薯收获机,包括设有导风口的机架,所述的机架一侧设置有风扇装置,所述的风扇装置上连接有泥土清理装置,所述的泥土清理装置前端设置有筛选装置,所述的筛选装置下方设置有收料装置,所述的收料装置下方设置有车轮装置,且所述的车轮装置一侧连接所述的泥土清理装置;所述的安装座一侧有铲板装置,所述的铲板装置上方设置有气缸,所述的气缸的一侧设置有运行槽,所述的运行槽两侧设有推板装置,本发明提供的一种马铃薯收获机,利用简易的泥土清理装置、筛选装置以及风扇装置相互配合,实现了对马铃薯按大小进项筛选,且吹走马铃薯内的部分异物。
20.通过对上述马铃薯收获机技术进行研究分析,目前的同类产品和技术存在以下不足。
21.(1)目前同类的马铃薯收获机没有独立的牵引驱动装置,仍需要靠传统的拖拉机等牵引驱动装置进行牵引,无法独立进行行走作业。
22.目前同类的马铃薯收获机都是对收获机中的作业机构进行了改进,并不涉及牵引驱动装置。这些产品技术中,要不仍需要采拖挂方式与其他牵引机构(例如农用拖拉机等)连接后使用,要不就集成在其他联合收割机、机动车上。这些产品技术根本无法适用于山区丘陵种植地带。因为这些种植地带本身就不适用拖拉机等大型牵引机构。如果使用这种产品技术,其使用成本根本是种植农民所无法承担的。
23.(2)目前马铃薯收获机所使用的牵引驱动装置,仍采用燃油发动机,通常采用柴油内燃机,其能耗大、费用高。
24.目前马铃薯收获机所使用的牵引驱动装置通常都采用柴油内燃机,这种设备能耗较大,相应的费用较高,特别是在山区丘陵地带运行中,其功耗将进一步增加,从而增加使用费用。马铃薯的亩产平均为1000
‑
2000公斤,其经济价值并不是太高,如果采用传统的收获机,将导致农民的种植收益大大降低,极大的限制了农民使用收获机的积极性。
25.(3)目前马铃薯收获机中采用的收获机构,采用了硬拉宽大的铲头,所以所需的动力极大,造成了许多不该有的浪费,并且丘陵地带地质与平原大不同,宽大的铲头因动力强劲很容易造成马铃薯的破损,产生不必要的损失。同时,现有的马铃薯收获机的筛土分选结构都是联动机构。其装置在筛选的过程中运转速度过高,使马铃薯在筛选过程中受外力影响产生不必要的破损,加大了耕作人民的损失。
26.有鉴于上述问题,本发明人提出以下技术方案。
技术实现要素:
27.本发明所要解决的第一技术问题在于克服现有技术的不足,提供一种小型电动马铃薯收获机的收获装置。
28.为了解决上述技术问题,本发明采用了下述技术方案:一种小型电动马铃薯收获机的收获装置,所述的收获装置包括:收获斗、筛选机构、挖铲机构、以及支撑机构;所述的筛选机构安装在收获斗中,该筛选机构包括由多数个具有间隙的筛杆构成传送带;所述的挖铲机构安装在收获斗前端,其包括:挖铲、挖铲柱和偏心驱动机构,所述的挖铲安装在挖铲柱下端,并且挖铲向后与筛选机构中的传送带承接,所述的挖铲柱与偏心驱动机构连动;所述的支撑机构位于挖铲机构的前方,该支撑机构包括:支撑柱和安装在支撑柱下方的滚轮。
29.进一步而言,上述技术方案中,所述的传送带通过链条机构或皮带机构驱动,该链条机构或皮带机构驱动由第一电机驱动。
30.进一步而言,上述技术方案中,所述的偏心驱动机构包括:第二电机、通过第二电机驱动旋转的转轴、设置在转轴与挖铲柱之间的偏心机构,转轴通过第二电机带动转动的时,通过偏心机构驱动挖铲柱运动。
31.进一步而言,上述技术方案中,所述的挖铲机构具有两个挖铲柱,所述的挖铲固定在两挖铲柱之间;两挖铲柱之间通过转轴连接。
32.进一步而言,上述技术方案中,所述的收获斗前端设置有连接板;所述的转轴穿过该连接板,令两挖铲柱与收获斗连接。
33.进一步而言,上述技术方案中,所述的挖铲柱与收获斗之间设置有活结连接杆。
34.进一步而言,上述技术方案中,所述的支撑机构安装在收获斗前端,支撑机构与收获斗之间采用非刚性连接。
35.本发明所要解决的第二技术问题在于克服现有技术的不足,提供一种可用于山地、丘陵的小型电动马铃薯收获机。
36.为了解决上述第二个技术问题,本发明采用了下述技术方案:一种小型电动马铃薯收获机,其采用了前面所述的收获装置,该收获机包括:采用电动履带驱动的机车和安装在机车上的收获装置,所述的收获斗与机车活动连接,并且通过气动活塞杆驱动收获斗转动。
37.进一步而言,上述技术方案中,所述的机车上安装有支架,所述的收获斗的后端枢接于支架下端,一牵引机构连接在收获斗前端和支架上端之间,通过牵引机构带动整个收获斗转动。
38.进一步而言,上述技术方案中,所述的机车上设置有电池,该电池用于自身履带驱动,并未收获装置供电;所述的牵引机构为:气动活塞杆、液压活塞杆、链条机构、钢丝收卷机构中的任意一种。
39.采用上述技术方案后,本发明与现有技术相比较具有如下有益效果:
40.1、本发明不再使用大马力型柴油机作为动力,改用履带电动底盘,并且采用收获装置在前,机车在后的布局,让地里的作物先被收获装置铲出归拢到中间,机车行走在保证不压到已经铲出的作物的情况下,在后面不断推动前面的收获装置作业,极大的优化了传统机械的布局和传动方式,所需的动力大大减小,整机更加紧凑,而且提高了传动系统的可
靠性有利于整体小型化,操作简单化。
41.2、本发明采用直流无刷电机来作为驱动机车行走的动力,本发明设计初衷就是为了节能减排及小型化,以适应小地块作业,所以不再使用传统内燃机动力作为主要动力。电动机与内燃机相比在体积上更加紧凑,体积小重量轻是最大的优点。而且电动机没有内燃机那样复杂的进排气系统和散热系统。在小型机械的布局上是非常有利的,电动机在结构上没有复杂的传动机构,易损件较少,非常符合农机具对可靠性的要求。
42.3、现有的收获机因为采用大马力柴油机或汽油机等统一提供动力再由传动系统逐级传送,最后到达收获机的挖铲、筛网等工作部件上,所以收获机的运行速度会随着发动机的转速变化而变化无法单独随意调整。操作人员会使用抵挡高转速来获得更多动力。但是随着发动机转速的升高,收获机部分的转速也随着增高,导致筛网等工作部运行速度过快对所收货的作物造成较大破坏,其筛网运行的过程中由于转速过高很容易导致马铃薯在土筛中受到强外力挤压破损以及掉皮等,破损率较高。这些破损的马铃薯等作物不仅在价格上无法卖出好的价钱,更会使其保存时间大大缩短。本发明改变了传统的农机动力,布局及传动。将电动动力系统使用到农机上,不再依靠大马力柴油机统一提供动力。把动力分开布局,机车的底盘采用单独的动力,收获装置同样采用单独的动力,传统的复杂动力传动系统被电线所取代,布局精简且可靠性极高,最重要的是传动系统的动力损耗几乎忽略不计。整机的工作部分不管是机车,还是收获机构都可以实现单独运作,随意调速。筛选机构、挖铲机构不再与机车的行进速度关联,使马铃薯与泥土以合理的速度进行分离,以此保护马铃薯,减小其破损率和浪费。
43.本发明不仅可以用于收获马铃薯,也可以用于番薯等地下块状作物。
附图说明:
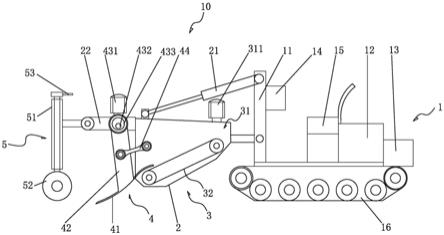
44.图1是本发明的结构示意图;
45.图2是本发明中收获斗部分的立体图。
具体实施方式:
46.下面结合具体实施例和附图对本发明进一步说明。
47.见图1、2所示,本发明为一种小型电动马铃薯收获机,该收获机包括:机车1和安装在机车1前端的收获装置10。
48.所述的机车1采用电动履带驱动,其包括:履带底盘16,以及安装在履带底盘上方的支架11、电池12、主驱动机构13、操控台14和座椅15。所述的电池12为主驱动机构13供电,通过主驱动机构13带动履带底盘16行进。所述的主驱动机构13采用直流无刷电机,其输出轴通过齿轮或者皮带驱动履带底盘15运行。电池12采用锂电池,并且电池12和主驱动机构13位于履带底盘16后侧,这样可起到配重效果,以对整个收获机起到平衡作用。
49.所述的收获装置10包括:收获斗2、筛选机构3、挖铲机构4、以及支撑机构5。
50.所述的收获斗2呈一个中空无底的料斗造型,收获斗2位于机车1的前端,二者之间采用活动连接,具体而言:所述的收获斗2的后端枢接于支架11下端,一牵引机构连接在收获斗2前端和支架11上端之间,通过驱动牵引机构带动整个收获斗2转动。
51.见图1所示,本实施例中牵引机构采用气动活塞杆21,当气动活塞杆21收缩时,带
动收获斗2顺时针转动,从而令整个收获装置10离开地面;当气动活塞杆21伸长时,收获斗2逆时针转动,从而令整个收获装置10靠近地面,便于作业。所述的气动活塞杆21主要作用是用于拉动收获斗转动,并在工作时对收获斗2产生一个拉力。所以,牵引机构也可以采用液压活塞杆、链条机构、钢丝收卷机构中的任意一种。
52.结合图2所示,所述的筛选机构3安装在收获斗2中,该筛选机构3采用链条机构31带动的传送带32构成,其中传送带32由多数个具有间隙的筛杆320构成,筛杆320之间的间距设置为小于马铃薯的间距即可,一般间距为4
‑
10厘米。
53.筛选机构3中的链条机构31由第一电机311驱动,第一电机311可以直接驱动链条机构31的主动链轮,也可以通过皮带、链条、或者齿轮传动机构带动链条机构的主动链轮。所述的第一电机311直接固定在收获斗2上。当链条机构31开始运转后,筛杆320构成的传送带32将沿顺时针方向运行,从而将前方的通过挖铲机构4挖起的还有马铃薯的土块向后输送,然后再传输带32的后端落下。
54.所述的挖铲机构4安装在收获斗2前端,其包括:挖铲41、挖铲柱42和偏心驱动机构43,所述的挖铲41安装在挖铲柱42下端,并且挖铲41的前端下倾,其后端向后与筛选机构3中的传送带32承接。所述的挖铲柱42与偏心驱动机构43连动。
55.所述的挖铲机构4具有两个挖铲柱42,所述的挖铲41固定在两挖铲柱42之间;两挖铲柱42之间通过转轴432连接。所述的收获斗2前端设置有连接板22;所述的转轴431穿过该连接板22,令两挖铲柱42与收获斗2连接。
56.所述的偏心驱动机构43包括:第二电机431、通过第二电机431驱动旋转的转轴432、设置在转轴432与挖铲柱42之间的偏心机构433,转轴通过第二电机431带动转动的时,通过偏心机构433驱动挖铲柱42运动。偏心机构433具体结构为:所述的挖铲柱42的上方设置有轴套,在转轴432的两端固定有一偏心轮,偏心轮与轴套之间设置有轴承。当转轴432通过第二电机431驱动开始运转后,通过偏心轮的运转带动挖铲柱42产生上下运行。
57.另外,所述的挖铲柱42与收获斗2之间设置有活结连接杆44。当挖铲柱42在偏心轮带动挖铲柱42产生上下运行的同时,由于活结连接杆44的存在,挖铲柱42在上下的运行的同时,将同时形成前后的摆动,这样就令位于挖铲柱42下方的挖铲41形成往复的上下及摆动的复合运动。这样的设计具有以下优点:为了令挖铲具有向下挖掘效果,挖铲的前端通常是向下倾斜,这种设计产生的不利效果就是,如果挖铲在工作时保持相对固定,其形成的挖掘力将促使挖铲一致倾斜向下,这样将导致挖铲越挖越深,阻力越来越大,直至整个收获机难以继续推进。而本发明采用这种结构后,不仅可以令挖铲41形成一种类似挖掘的效果,同时还可以防止挖铲41持续向下挖掘,防止越挖越深。
58.所述的支撑机构5位于挖铲机构4的前方,该支撑机构5包括:支撑柱51和安装在支撑柱51下方的滚轮52。如前面所述,为了防止挖铲41越挖越深,必须将挖铲41保持在一个适当的高度,而本发明可通过支撑机构5对挖铲41以及整个收获斗2形成支撑的作用。
59.所述的收获斗2前端设置有连接板22,所述的支撑机构5通过该连接板22与收获斗2活动连接。整个支撑机构5由两根支撑柱51组成,两支撑柱51之间可通过连接板或连接杆固定连接。整个支撑机构5与收获斗2之间采用非刚性连接,如图1所示,支撑机构5与收获斗2之间采用的一种具有摆动幅度的枢接,即支撑机构5可在一定范围内进行摆动。或者,在支撑机构5中支撑柱51上设置弹性减震机构。不论是采用哪种方式,都是为了令滚轮52可以适
应土地表面的坑洼,通过有限的摆动或者弹性减震机构令滚轮52可以适应土地表面地形,同时,还可以避免滚轮52在后方推动力作用下陷入松软的土地中。
60.另外,为了适应不同挖掘深度,所述的支撑机构5中滚轮52与支撑柱51之间采用可伸缩调节结构;或者所述的支撑机构5与收获斗2之间采用可调节高度的固定连接。见图1所示,本实施例中,可通过调节把手调节滚轮42的向下延伸的长度,从而调节整个支撑柱5的高度。当挖掘深度较深时,可以将滚轮42向上调节,这样挖铲41就可以更伸入底面,反之就可以将滚轮42向下调节。
61.上述第一电机311、第二电机431均通过线缆由电池12供电。当然,第一电机和第二电机也可以合并采用一个电机,然后通过一个传动机构分别驱动筛选机构3中的链条机构和挖铲机构4中的偏心驱动机构43。
62.使用本发明时,启动气动活塞杆21伸长,令收获斗2逆时针转动,从而令整个收获装置10靠近地面,同时挖铲41伸入底面。然后卡其机车1向前运行,随着机车1的行进,挖铲41伸入底面将土地的翻开,被翻开的土块以及埋入土块中的马铃薯随着挖铲向后送入至筛选机构3的传送带32上。由于传送带32有若干具有间隙的筛杆320构成,所以泥土将通过筛杆320之间的间隙掉落,较大的土块和马铃薯将随着传送带32向后运行,直至有传输带32的后端落下,此时马铃薯就直接落在土地表面了,再由操作人员拾起即可。
63.当然,以上所述仅为本发明的具体实施例而已,并非来限制本发明实施范围,凡依本发明申请专利范围所述构造、特征及原理所做的等效变化或修饰,均应包括于本发明申请专利范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

