1.本发明涉及安防技术领域,特别是涉及一种抗倾斜被动红外探测光路设计方法。
背景技术:
2.人体目标是环境中最重要和最活跃的元素,对场景中的人体目标进行检测、识别和跟踪一直以来都是关注的热点。目前,它已成为计算机视觉领域中的一个重要研究方向,在智能监控、高级人机接口、机器人视觉等方面有着广泛的应用前景。用于人体识别的特征必须具有差异性,在一定时间内具有不变性,并且容易得到量化的测量。可见光视频人体检测在图像图形处理、智能监控、视频编码等领域有着重要的地位。但由于受可见光成像所需条件的限制,使得相关研究应用范围受到一定的限制。与可见光成像相比,红外热成像因其具有强大的“穿透”能力,可以透过黑暗和烟雾,看到在可见光波段无法看见的感兴趣的目标。
3.目前,红外图像在交通、夜视、安全监控、医学、天文、工业监控等领域都取得了较好的效果。但由于红外成像设备价格昂贵,检测和识别算法复杂度高,运算量大,而在某些场合一些简单的设备就完全能满足需要。例如,用8bit灰度值表示100
×
100像素的图像中感兴趣的位置和速度信息只需要1bit就可以实现,因此对于某些领域的应用,仅使用简单的设备就可以实现。pir探测器作为入侵报警系统中最常见的监控产品之一,由于其具有功耗小、隐蔽性好、成本低廉、对光照条件无要求等优点,而被广泛应用到安防系统、智能家居、企业安全等领域。但是,大多数远距离被动红外探测设备的视场角都比较小,因此需要手动或自动对准/瞄准。
技术实现要素:
4.本发明所要解决的技术问题是提供一种抗倾斜被动红外探测光路设计方法,在不进行人为手动对焦的情况下也能有效探测。
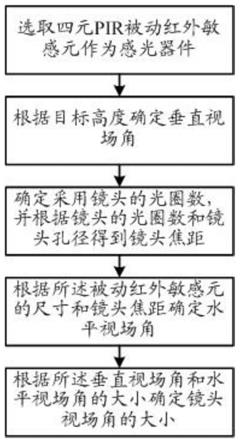
5.本发明解决其技术问题所采用的技术方案是:提供一种抗倾斜被动红外探测光路设计方法,包括以下步骤:
6.(1)选取四元pir被动红外敏感元作为感光器件;
7.(2)根据目标高度确定垂直视场角;
8.(3)确定采用镜头的光圈数,并根据镜头的光圈数和镜头孔径得到镜头焦距;
9.(4)根据所述被动红外敏感元的尺寸和镜头焦距确定水平视场角;
10.(5)根据所述垂直视场角和水平视场角的大小确定镜头视场角的大小。
11.所述步骤(2)中通过确定垂直视场角,其中,y为垂直视场角,a为目标的高度,b为目标与镜头之间的水平距离。
12.所述步骤(3)中通过镜头光圈数=镜头焦距
÷
镜头孔径计算得到镜头焦距。
13.所述步骤(4)中通过确定水平视场角,其中,x为水平视场角,y为像高,f为镜头焦距,其中,c为被动红外敏感元的长度,d为被动红外敏感元的宽度。
14.有益效果
15.由于采用了上述的技术方案,本发明与现有技术相比,具有以下的优点和积极效果:本发明在不进行人为对焦的前提下,可容忍红外探测设备在
±
10
°
倾斜范围内正常工作。本发明采用四元pir被动红外敏感元,其可向四个方向同时探测,从而能够在不加外力的情况下对水平360
°
视场进行监测。
附图说明
16.图1是本发明实施方式的流程图;
17.图2是本发明实施方式中使用的感光器件探测时的示意图;
18.图3是本发明实施方式中基于倾斜角度的考虑示意图;
19.图4是本发明实施方式中基于精确计数的考虑示意图;
20.图5是本发明实施方式的使用效果示意图。
具体实施方式
21.下面结合具体实施例,进一步阐述本发明。应理解,这些实施例仅用于说明本发明而不用于限制本发明的范围。此外应理解,在阅读了本发明讲授的内容之后,本领域技术人员可以对本发明作各种改动或修改,这些等价形式同样落于本申请所附权利要求书所限定的范围。
22.本发明的实施方式涉及一种抗倾斜被动红外探测光路设计方法,如图1所示,包括以下步骤:
23.(1)选取四元pir被动红外敏感元作为感光器件,本实施方式中的感光器件如图2所示,其在方形四周各设置一个被动红外敏感元a,且均位于中心位置,如此可以向四个方向同时探测,从而能够在不加外力的情况下对水平360
°
视场进行监测。
24.(2)根据目标高度确定垂直视场角,本实施方式中通过确定垂直视场角,其中,y为垂直视场角,a为目标的高度,b为目标与镜头之间的水平距离。如图3所示,在进行镜头视场角的确定时,需要基于倾斜角度进行考虑,由于本实施方式构建的被动红外探测设备不能进行手动对焦,因此需要在牺牲部分探测距离的情况下容忍设备的倾斜度,假设目标的最大高度为3米,目标与镜头之间的水平距离(即探测距离)为15米,可容忍设备的倾斜度为
±
10
°
,则垂直视场角y≈42.6
°
。
25.(3)确定采用镜头的光圈数,并根据镜头的光圈数和镜头孔径得到镜头焦距,其中,镜头焦距通过镜头光圈数=镜头焦距
÷
镜头孔径计算得到。镜头的完整光圈数值为:f1,f1.2,f1.4,f2,f2.8,f4,f5.6,f8,f11,f16,f22,f32,f44,f64;光圈数值越大,景深越大,探测物体的距离对成像质量影响就越小;反之光圈数越小,成像质量越差,因此可以根
据需求确定光圈数值的大小后,再根据镜头孔径得到镜头焦距,从而能够选用合适的透镜。
26.(4)根据所述被动红外敏感元的尺寸和镜头焦距确定水平视场角,本实施方式通过确定水平视场角,其中,x为水平视场角,y为像高,f为镜头焦距,其中,c为被动红外敏感元的长度,d为被动红外敏感元的宽度。在进行镜头视场角的确定时,需要基于精确计数进行考虑,如图4所示,假设计数目标间距为5米,根据上式可得x≈9.5
°
,即水平视场角超过9.5
°
后计数将会出错。
27.(5)根据所述垂直视场角和水平视场角的大小确定镜头视场角的大小,因为,本实施方式中采用的透镜为圆形,因此垂直视场角也不得超过9.5
°
。综上所述,本实施方式中的光学系统镜头的视场角应小于或等于9.5
°
。
28.图5是本实施方式的使用效果示意图,从图中可以看出,采用本实施方式设计的光路其在红外探测设备0
°
和25
°
时均能够对5米、10米和15米内的人员信号进行准确检测。
29.不难发现,经过本发明设计的光路系统可以在不进行人为对焦的前提下,容忍红外探测设备在
±
10
°
倾斜范围内正常工作。本发明采用四元pir被动红外敏感元,其可向四个方向同时探测,从而能够在不加外力的情况下对水平360
°
视场进行监测。
技术特征:
1.一种抗倾斜被动红外探测光路设计方法,其特征在于,包括以下步骤:(1)选取四元pir被动红外敏感元作为感光器件;(2)根据目标高度确定垂直视场角;(3)确定采用镜头的光圈数,并根据镜头的光圈数和镜头孔径得到镜头焦距;(4)根据所述被动红外敏感元的尺寸和镜头焦距确定水平视场角;(5)根据所述垂直视场角和水平视场角的大小确定镜头视场角的大小。2.根据权利要求1所述的抗倾斜被动红外探测光路设计方法,其特征在于,所述步骤(2)中通过确定垂直视场角,其中,y为垂直视场角,a为目标的高度,b为目标与镜头之间的水平距离。3.根据权利要求1所述的抗倾斜被动红外探测光路设计方法,其特征在于,所述步骤(3)中通过镜头光圈数=镜头焦距
÷
镜头孔径计算得到镜头焦距。4.根据权利要求1所述的抗倾斜被动红外探测光路设计方法,其特征在于,所述步骤(4)中通过确定水平视场角,其中,x为水平视场角,y为像高,f为镜头焦距,其中,c为被动红外敏感元的长度,d为被动红外敏感元的宽度。
技术总结
本发明涉及一种抗倾斜被动红外探测光路设计方法,包括以下步骤:选取四元PIR被动红外敏感元作为感光器件;根据目标高度确定垂直视场角;确定采用镜头的光圈数,并根据镜头的光圈数和镜头孔径得到镜头焦距;根据所述被动红外敏感元的尺寸和镜头焦距确定水平视场角;根据所述垂直视场角和水平视场角的大小确定镜头视场角的大小。本发明设计的探测光路在不进行人为手动对焦的情况下也能有效探测。行人为手动对焦的情况下也能有效探测。行人为手动对焦的情况下也能有效探测。
技术研发人员:王岳鹏 崔文 张泽斌 李宝清 袁晓兵
受保护的技术使用者:中国科学院上海微系统与信息技术研究所
技术研发日:2021.08.24
技术公布日:2021/11/28
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。