1.本实用新型涉及轮胎技术领域,尤其涉及一种爬坡机器人的轮胎。
背景技术:
2.目前移动服务机器人产业发展较快,爬坡越障能力是移动服务机器人性能的重要评价指标之一,即爬坡越障能力越好则移动服务机器人的行走能力越强。而轮胎的防滑能力是决定移动机器人爬坡越障能力的关键因素,而现有的移动机器人大多采用普通的横向凸起结构,其在遇到具有一定坡度的路面时抓地能力较弱,或者是在遇到路面较滑或有积水时容易导致侧滑的发生。
3.中国专利cn109795311b公开了专利名称为一种机器人爬坡防滑装置的专利,其技术要点在于:一种机器人爬坡防滑装置,包括轮胎本体和防灰罩,所述防灰罩设置于轮胎本体顶部且与机器人本体固定连接,所述防灰罩内部设有滑动通道,所述滑动通道内腔顶部活动设有双轴电机,所述双轴电机两端通过转轴连接有移动齿轮,所述移动齿轮对应的滑动通道内腔底部表面设有齿轮轨道,所述双轴电机一侧通过支架固定连接有连接滑杆,本发明利用双轴电机快速带动移动齿轮在齿轮轨道上转动,带动活动防滑组移出滑动通道至轮胎本体下方与地面之间的夹角内,弹簧减震组带动顶支撑防滑板和防滑软套伸长,防滑软套顶部与轮胎本体接触,底摩擦砂板与地面接触,其能够保护轮胎,并且不会滑坡,但是该申请需要在轮胎的周围设置防滑装置,装置比较复杂,也占用了一定的空间。
技术实现要素:
4.本实用新型针对爬坡机器人防滑以及减小空间占用的问题,提供了一种爬坡机器人的轮胎。
5.为了解决上述技术问题,本实用新型通过下述技术方案得以解决:
6.一种爬坡机器人的轮胎,包括轮胎本体、连接柱和中心块,中心块设置在轮胎本体的中心处,连接柱将轮胎本体与中心块固定连接,连接柱与中心块均设置为空心结构,轮胎本体内设置有通孔,通孔与连接柱的空心结构连通,连接柱的空心结构与中心块的空心结构连通,通孔内设置有能够在连接柱和轮胎本体内移动的移动杆,移动杆靠近中心块的一端设置有密封块,移动杆远离中心块的一端设置有能够增大与地面之间的摩擦力的摩擦件,中心块的外部设置有将中心块、连接柱以及轮胎本体内部的空气维持为固定量的气缸。
7.作为优选,轮胎本体的表面设置有防滑块,防滑块设置为箭头形状,防滑块朝外侧面设置为斜面。
8.作为优选,通孔、连接柱以及移动杆的数量均至少为5个,通孔、连接柱以及移动杆围绕轮胎本体的圆心呈圆周均匀分布。
9.作为优选,中心块远离气缸的一侧固定设置有能够与机器人传动轴连接的连接块。
10.作为优选,摩擦件设置为吸盘,吸盘通过连接杆与移动杆固定连接,吸盘能够在一
定程度上增加与地面之间的摩擦力,防止打滑。
11.作为优选,吸盘与连接杆均由橡胶制成,具有一定弹性,保证轮胎能够适应不同地面。
12.作为优选,轮胎本体设置为聚氨酯免充气轮胎。
13.作为优选,气缸位于中心块的内部的输出端设置有压力应变片,气缸会根压力应变片所受压力决定是否对中心块内部充气。
14.本实用新型由于采用了以上技术方案,具有显著的技术效果:
15.本实用新型在免充气轮胎的内部设置有通孔、连接柱以及移动杆,连接柱既能够对免充气轮胎起到一定的制成作用,也能够连通通孔与中心块,当机器人需要爬坡时可以通过气缸对中心块内充气,并且可以根据爬坡的角度对中心块内充入不同体积的空气,使移动杆伸出轮胎的极限距离合适,从而使得爬坡更简单,此外本实用新型由于移动杆的极限距离可以加长,加长到一定距离之后还可以爬楼梯或者过障,保证使用过程中能够适应不同地形,本实用新型所有装置均设置在轮胎本体的内部,不需要再外部增加装置,在保证不打滑的情况下,没有增加占用的体积。
附图说明
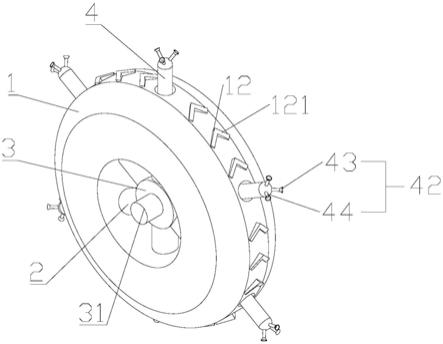
16.图1是本实用新型实施例1的结构示意图。
17.图2是本实用新型实施例1的主视图。
18.图3是图2中a
‑
a处的截面示意图。
19.附图中各数字标号所指代的部位名称如下:其中,1
‑
轮胎本体、11
‑
通孔、 12
‑
防滑块、121
‑
斜面、2
‑
连接柱、3
‑
中心块、31
‑
连接块、4
‑
移动杆、41
‑
密封块、42
‑
摩擦件、43
‑
吸盘、44
‑
连接杆、5
‑
气缸。
具体实施方式
20.下面结合附图与实施例对本实用新型作进一步详细描述。
21.实施例1
22.如图1所示,一种爬坡机器人的轮胎,包括轮胎本体1、连接柱2和中心块 3,中心块3设置在轮胎本体1的中心处,连接柱2将轮胎本体1与中心块3固定连接,连接柱2与中心块3均设置为空心结构,轮胎本体1内设置有通孔11,通孔11与连接柱2的空心结构连通,连接柱2的空心结构与中心块3的空心结构连通,通孔11、连接柱2以及移动杆4的数量设置为6个,通孔11、连接柱 2以及移动杆4围绕轮胎本体1的圆心呈圆周均匀分布。
23.其中,通孔11内设置有能够在连接柱2和轮胎本体1内移动的移动杆4,移动杆4靠近中心块3的一端设置有密封块41,移动杆4远离中心块3的一端设置有能够增大与地面之间的摩擦力的摩擦件42。
24.具体的,摩擦件42设置为吸盘43,吸盘43通过连接杆44与移动杆4固定连接,吸盘43与连接杆44均由橡胶制成,并且轮胎本体1设置为聚氨酯免充气轮胎,使用免充气轮胎使得所有零部件使用的时候更加稳固。
25.同时,为了防止轮胎本体1滚动时出现打滑现象,也为了增大轮胎本体1 与地面之间接触处的摩擦力,轮胎本体1的表面设置有防滑块12,防滑块12设置为箭头形状,防滑块
12朝外侧面设置为斜面121,防滑块12较厚的一端为前行的方向,即朝箭头朝向前进。
26.本实施例的中心块3的外部设置有将中心块3、连接柱2以及轮胎本体1内部的空气维持为固定量的气缸5,气缸5位于中心块3的内部的输出端设置有压力应变片,气缸5会根压力应变片所受压力决定是否对中心块3内部充气。
27.此外,中心块3远离气缸5的一侧固定设置有能够与机器人传动轴连接的连接块31,便于安装。
28.使用方法:使用前,可以在爬坡机器人上设置角度传感器,将气缸5开关与爬坡机器人电连接,通过爬坡机器人的内部程序控制气缸5对中心块3充入适量的空气,使用时,先识别地形,并且测算爬坡角度,确定需要充入的空气的体积。充气时,需要保证其中一根移动杆4位于轮胎本体1内部,并且接触地面,与顶面垂直,充气完成后,机器人向前行驶爬坡或者爬楼梯或者越障时,随着前一根移动杆4的释放与后一根移动杆4的压紧,由于中心块3、连接柱2 以及轮胎本体1内部的空气,前进方向的移动杆4依次被挤压,而后方移动杆4 依次被挤压出来,以此循环,降低上坡或者爬楼梯或者越障时的阻力,保证爬坡的有效进行。
29.实施例2
30.本实施例与实施例1的区别之处在于:通孔11、连接柱2以及移动杆4的数量均至少为5个。
31.实施例3
32.本实施例与实施例1的区别之处在于:通孔11、连接柱2以及移动杆4的数量至少为7个。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。