具有导线销组件的缝纫机
1.本专利申请要求德国专利申请de 10 2019 205 303.3的优先权,其内容通过引用的方式被并入本文。
技术领域
2.本发明涉及一种具有导线销组件的缝纫机。
背景技术:
3.在许多实施方式中已知缝纫机,例如从ep 3 088 589 b1、ep 3 360 994 a1、us 6 276 289 b1和de 10 2013 107 270 b3中已知缝纫机。
4.de 20 2012 104 187 u1公开了一种链式线迹缝纫机。de 87 13 500 u1公开了一种具有钩线器和钩线扩展器的双链式线迹缝纫机。
技术实现要素:
5.本发明的目的是改进一种缝纫机的组件,使得在线缝开始部可重现地产生吸引人的线缝图案。
6.根据本发明,该目的通过具有在权利要求1中给出的特征的缝纫机来实现。
7.根据本发明认识到,借助于具有至少一个导线销(导线杆,指状导线件)的导线销组件,线开始部段可以在开始缝制时以受控制的方式被从缝料的可见区域拉离。在这种情况下,在可见区域中将不存在干扰视觉观感的线开始部段。被缝制的线缝以干净的线迹开始。
8.在线圈接合(接入,插入)位置中,至少一个导线销的销顶端(销末端)位于缝纫机的钩线器(夹线器)与针板之间。所述至少一个导线销的销顶端的这种布置使得能够可靠地抓住线圈。
9.所述至少一个导线销的线圈拉出位置同时可以是导线销的中性位置(空闲位置),在缝制开始时被使用后该导线销可以在继续缝制期间保留在该中性位置中。由导线销组件的导线销拉出的线圈可以是面线线圈。
10.导线销可以被设计为具有小的厚度。
11.根据权利要求2所述的所述至少一个导线销的弯曲的实施方式导致,该导线销在关键的线迹形成区域中在其移位运动期间仅要求非常小的结构空间。
12.弯曲的导线销实施方式的弯曲部可以在其曲率方面匹配于导线销的移位运动,使得导线销的运动轨迹至少与导线销近似地弯曲地延伸。
13.根据权利要求3所述的捕获钩被证明为特别适合于可靠地抓住线圈。
14.根据权利要求4所述的具有两个导线销的导线销组件可以被与双针缝纫机一起使用。
15.根据权利要求5所述的带槽的导向件(滑槽导向件)被证明为特别适合于可重现地且快速地引导所述移位运动。
16.这相应地适用于根据权利要求6所述的气动驱动装置。另选地,也可以使用电动马达驱动装置作为导线销驱动装置。
17.缝纫机可以是链式线迹缝纫机,并且特别是双链式线迹缝纫机。
18.根据权利要求7所述的导线销的厚度能实现,尽管导线销的销顶端在线圈接合位置中位于其间,但也能将钩线器的钩线器顶端引导靠近针板,这就使得能以短线圈进行工作,并相应地使线开始部段和线结束部段可能较短。钩线器与针板—导线销接合到这两个部件之间的地方—之间的间距仅需被设计为略微大于导线销的厚度,例如最多比导线销的厚度大2mm。导线销在钩线器与针板之间的间距的方向上的厚度优选最大为1.8mm,并且特别可以最大为1.5mm。
19.根据权利要求8所述的导线销的小的宽度能实现,即使在小的线圈的情况下也使接合整齐,这又有利地使线圈所需的最大线长度保持较小。导线销横向于其纵向延伸部的宽度可以小于4mm,可以小于3mm,并且也可以小于2mm。
附图说明
20.下面根据附图详细说明本发明的一个实施例。图中示出:
21.图1透视地示出缝纫系统的缝纫机的主要部件,所述缝纫系统用于缝制特别是多维地位于空间中的线缝;
22.图2从与图1类似的观察方向放大地示出缝纫机的导线销组件,其中,导线销组件的导线销位于用于接合在由缝纫机在线迹形成区域中所产生的线圈中的线圈接合位置中;
23.图3透视地在端侧的视图中示出又是在线圈接合位置中的缝纫机的线迹形成部件,包括导线销在内;
24.图4在与图3类似的视图中示出在线圈拉出位置中的、具有导线销组件的导线销的线迹形成部件,该线圈拉出位置相对于线圈接合位置为了拉出线圈从线迹形成区域远离地倾斜向下转移;和
25.图5示出根据图3和图4的线迹形成部件的图1中从观察方向v的侧视图,其中,导线销从线圈接合位置中移出。
具体实施方式
26.缝纫系统用于缝制多维线缝,特别是非平面地三维地位于空间中的线缝。作为缝纫系统的一个应用示例,可以在车辆的内部空间中,例如在仪表板、门侧饰板或扶手上安装装饰缝应用。该缝纫系统包括缝纫机1,在图1中示出该缝纫机的主要部件。缝纫机1由机器人(自动机械)的未详细示出的臂支承,通过该臂,缝纫机1可在五个或六个自由度上以任意控制的方式在空间中定向。
27.缝纫机1是双链式线迹缝纫机。
28.为了使位置关系更便利,在附图中分别说明了笛卡尔xyz坐标系。x轴在图1中倾斜地向左后方延伸,下面将详细说明的线迹形成工具沿着该x轴在初始位置中产生线缝。y轴在图1中倾斜地向左前方延伸,而z轴在图1中向上方延伸。
29.缝纫机1具有壳体2,该壳体具有平行于yz平面的c形基本结构,并且具有壳体上部部分3、壳体下部部分4和将这两个部分连接成c形的立柱5。壳体上部部分3和壳体下部部分
4沿y方向延伸。立柱5沿z方向延伸。
30.作为线迹形成部件,缝纫机1具有两个缝纫针6、7(参见图5),这两个缝纫针由共同的针杆8支承。针杆8安装在针杆上部部件中,该针杆上部部件在壳体上部部分3中被平行于z轴驱动而上升和下降。
31.两个钩线器9、10(参见图5)用作另外的线迹形成部件,这两个钩线器安装在钩线器下部部件11上,并且与缝纫针6、7同步地被驱动地以便形成线迹。钩线器9、10被设计为围绕平行于y轴的轴摆动的摆动式或者说摇摆式钩线器。钩线器9、10可以被设计为用于形成链式线迹。钩线器9、10可以被设计为内嵌式钩线器。
32.钩线器下部部件11形成缝纫机1的柱。该钩线器下部部件11安装在壳体下部部分4上。由于钩线器下部部件11的柱状结构,在其中利用缝纫机1产生线缝的线迹形成区域可从所有侧面非常自由地接近。
33.在形成线迹期间,所述两个缝纫针6、7沿着针杆纵轴被驱动而上升和下降。与此同步地,钩线器9、10被驱动而进行摆动运动。
34.在形成线迹期间,所述两个缝纫针6、7穿过针板11a中的针孔,缝料在形成线迹期间被放置在该针板上。针板11a布置在带有两个钩线器9、10的钩线器下部部件11的上方,并且构造成与钩线器9、10的摆动运动互补地弯曲。
35.缝纫针6、7和钩线器9、10的这种线迹形成运动由安置在壳体2的立柱5中的缝制驱动马达驱动。
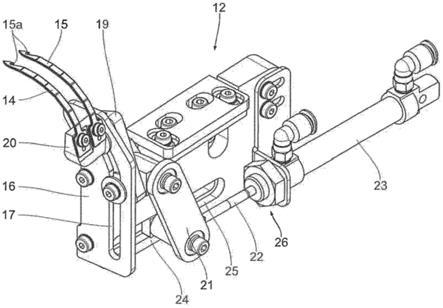
36.缝纫机1具有整体上在图2中示出的导线销组件12。该导线销组件12用于,在缝纫机1的第一线迹之后从缝料可见区域向下拉动面线13(参见图4)并且因此确保了整齐的线缝图案。
37.导线销组件12具有两个导线销14、15。所述导线销14、15分别配属于两个线迹形成部件对、即缝纫针6/钩线器9以及缝纫针7/钩线器10之一。这两个导线销14、15在它们的自由端部上分别具有线捕获钩15a。导线销14、15沿着z方向的延伸度、即导线销的厚度最大为2mm。导线销14、15沿着y方向的宽度最大为5mm。
38.两个导线销14、15可以被驱动而在图1至图3中示出的线圈接合位置和相对于其相对向下移位并且在图4中示出的线圈拉出位置之间转换。
39.在线圈接合位置中,导线销14、15接合相应面线13的由缝纫机1在线迹形成区域中产生的线圈。在此,导线销14接合到由缝纫针6引导的面线线圈中,而导线销15接合到由缝纫针7引导的面线线圈中。这种接合在被置于针板上的缝料的下方进行。在线圈接合位置中,两个导线销14、15的销顶端位于相应的钩线器9、10与针板11a之间。
40.在线圈拉出位置中,两个导线销14、15相对于线圈接合位置移动远离线迹形成区域以用于拉出面线线圈,如由图3和图4的比较所示。
41.两个导线销14、15构造成弯曲的。导线销14、15的弯曲在其曲率方面匹配于在线圈接合位置与线圈拉出位置之间的移位运动的曲率。也就是说,导线销14、15的运动轨迹与导线销14、15自身近似地弯曲延伸。导线销14、15的这种运动轨迹以及曲率又被设计为与针板11a的弯曲设计以及与钩线器9、10的摆动运动互补,使得导线销的运动能在针板11a与钩线器9、10之间的小的安装空间中不受干扰地进行。
42.导线销14、15的移位运动的该运动轨迹通过带槽的导向件16预定。该带槽的导向
件包括弯曲的槽式长孔17,该槽式长孔平行于xz平面。带动杆19的两个导向螺栓在所述带槽的导向件16的槽式长孔17中被引导,在该带动杆上固定有导线销支座20。带动杆19经由连接杆21与双作用的气动缸23的活塞杆22铰接地连接。连接杆21的传动运动由基体24中的平行于y方向延伸的长孔25引导。气动缸23连同具有杆19、21的杆传动装置一起构成导线销组件12的导线销驱动装置26。
43.导线销组件12通过基体24安装在缝纫机1的壳体下部部分4上。
44.在线缝的开始处,缝纫机1以如下方式运行导线销组件12:
45.一旦缝料到达针板11a上的正确的相对位置中,则触发待缝制线缝的第一线迹的形成。为此,使分别引导着面线13的两个缝纫针6、7从上方经由各自配属的针孔穿过缝料和针板11a。在到达下止点之后,缝纫针6、7再次向上移动一段距离,使得在针板11a与钩线器9、10之间在缝料下方形成两个面线线圈。
46.随后,导线销14、15从可以与线圈拉出位置相对应的中性位置中被转移到线圈接合位置中(例如参见图3)。在此,导线销14、15的销顶端穿入所形成的面线线圈中。
47.为了驱动这种到线圈接合位置中的转移运动,气动缸23的活塞杆22伸出。
48.此后,导线销通过活塞杆22的缩回被带回到线圈拉出位置中,其中,捕获钩15a带动相应的面线13,并且面线开始部分在此分别经过缝料向下方被从缝料可见区域中拉出。
49.在随后进一步缝制线缝时,导线销保留在线圈拉出位置或中性位置中。根据待缝合的构件的形态并且根据线缝的路线,缝纫机1的缝制头通过机器人的臂在空间中三维地移动,从而可以到达难以触及的缝制位置。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。