1.本发明涉及用于以获得纳米层的方式沉积液体的系统。
2.本发明更精确地关注用于基板上液体的经控制沉积的系统、在基板上沉积液体的方法、该系统用于增材制造的用途,及借由该方法获得的产物。
背景技术:
3.增材制造为涵盖基于逐层沉积的不同技术的通用术语。可区分两种主要的增材制造技术:直接印刷技术及所谓的间接技术。前者在于将所需材料直接沉积至基板上。间接技术使用诸如雷射或uv灯的能量源对所需材料的浴槽起作用。
4.增材制造正强劲增长,此极大地改变了各行业设计其制造制程的方式。现在存在复数种增材制造技术,该等技术使得能够以一毫米与一米之间的大小范围获得物体。已努力降为一毫米以下。
5.本领域技术人员已知的用于沉积液体之间接印刷技术为双光子聚合,其使得能够使用雷射在光可聚合树脂上印刷物体。彼树脂必须对雷射的波长透明,以便能够进行化学反应并产生聚合作用。此技术的分辨率可达到雷射波长的一半,即大约一百纳米。此技术的优势为能够尤其归功于雷射移动的精度而高精度地制造复杂的物体。然而,一方面,由于复杂的装置,且还由于所用材料的限制——材料必须为光可聚合的,该技术仍然受到限制。
6.另一间接印刷技术为电子束辅助生长技术(febid),该技术使得能够借由用电子轰击所需材料之前驱体气体来沉积材料,以便使材料沉积在基板上。例如,此为可安装在扫描电子显微镜中的技术。借由将电子束聚焦在极小大小(小于1nm)的点上,febid可获得大约一纳米的分辨率。即使此技术的特征在于不均等的潜在分辨率并具有借由原位表征产生复杂物体的可能性,但目前不能完全实现沉积精度。实际上,电子束与挥发性前驱体之间的相互作用难以控制,从而产生大小通常大于焦点准确度的沉积物。又,必须找到适合于装置使用条件之前驱体以使其能够沉积,其结果为大大降低了制造材料的可能性。
7.近年来,使用局部探针点(afm或stm)的技术使得能够实现接近一百纳米的分辨率,如例如专利参考文献wo 2017/106199及us 2017/0259498中所指出。
8.此等上述技术皆为直接印刷技术,其使用移动的精度及局部探针技术的空间分辨率来将液体材料沉积在各种基板上。此等技术使得能够用多种溶剂来沉积极不同的材料,该等溶剂为:
9.‑
不同类型的聚合物;
10.‑
生物分子(肽、adn、酶
……
);
11.‑
各种胶体。
12.在一种情况下,如羽毛笔般使用afm点。在每次沉积之前将其浸入沉积材料的液滴中。在另一情况下,在沉积之前,使该点装载有少量所需液体材料。然而,即使分辨率极高,该两种方法仍具有主要缺点,此为由于在缺少具有充分容积的储集器的情况下不可能进行连续印刷。又,因为没有参数能够控制自该点穿过或穿过该点的材料的流动,所以所获得沉
积物的精度不足。
13.因此,需要由小于100nm的厚度界定,能够沉积多种材料,具有实现沉积控制的可调整参数,及充分大的储集器以不间断地制造一或多个物体的增材制造特征层。
技术实现要素:
14.为解决前述缺点或更多前述缺点,根据本发明,一种用于基板上的液体的经控制沉积的系统包含:
15.‑
纳米喷射器,其包含:
16.■
储集器,其用于储存该液体,
17.■
不可变形突起,其具有用于自该储集器提取该液体的喷射孔口,
18.‑
机械谐振器,其固定至该纳米喷射器,该机械谐振器适于检测该突起与该基板之间的接触,
19.‑
该机械谐振器的控制构件,该控制构件连接至:
20.‑
该机械谐振器的激励构件,其适于使该机械谐振器以振荡频率(fi)振荡,使得该突起在该突起接触该基板的低位置与该突起并不接触该基板的高位置之间振荡,该控制构件连接至
21.‑
检测器构件,其适于检测该机械谐振器的该振荡,且该控制构件连接至
22.‑
调节器构件,其适于借由控制该机械谐振器的该振荡来调整该突起与该基板之间的该接触,该调节器构件连接至用于调节的第一移位构件,该第一移位构件至少适于将该纳米喷射器的该基板沿着轴线z朝向彼此或远离彼此移动。
23.在本发明的上下文中,液体意指能够在大于其临限应力的应力值下流动的液体或凝胶,液体能够或不能够包含悬浮液中的物种。例如,可使用水、盐水溶液、植物油、聚硅氧油、光学微影树脂(su8等)、离子液体、dna
‑
rna链、诸如金及银的贵金属的纳米粒子(胶体或其他)、诸如胶原蛋白、多糖、蛋白质的不同生物材料、诸如氧化锆、氧化铝、氢氧化铝、二氧化钛的陶瓷材料作为液体,条件为该等粒子的大小允许液体穿过纳米喷射器的喷射孔口。例如,喷射孔口可为待沉积液体中所包含的粒子的直径的7至10倍。
24.例如,悬浮液中的物种可为胶状物种、成溶液的聚合物物种等。
25.在本发明的上下文中,基板意指可平坦、经结构化或具有曲率半径的支撑件。
26.例如,借助于经结构化支撑件,可存在具有正方形形状、半球形形状、弯曲形状、锯齿形状、尖头形状等的支撑件。
27.在本发明的上下文中,纳米喷射器意指包含具有小于1μm的直径的喷射孔口的喷射器。
28.在本发明的上下文中,喷射孔口意指穿过其中喷射来自纳米喷射器的液体,以此后将液体沉积在基板上的孔口,彼孔口的内径及外径适于进行希望获得的沉积。
29.应注意,除了喷射孔口的内径之外,外径也影响沉积。实际上,在突起接触基板时,喷射孔口的外径影响形成于突起与基板之间的弯液面。喷射孔口的内径与外径之间的比率较佳介于0.8与1之间,包括0.8及1。若在突起,特定而言位于喷射孔口的内径与外径之间的壁与基板之间发生接触时形成了弯液面,则能保证液体在基板上的沉积。此外,在喷射孔口的内径与外径之间的比率介于0.8与1之间,包括0.8及1的情况下,弯液面较稳定,从而能保
证在突起的低位置与高位置之间的沉积。若喷射孔口的内径与外径之间的比率接近1,即若位于喷射孔口的内径与外径之间的壁具有最小可能厚度,则有利于沉积及稳定性。
30.应注意,设计涵盖具有可变大小的喷射孔口。又,喷射孔口可具有任何形状的截面,例如正方形、矩形、卵形、圆形等。例如,突起及纳米喷射器可为整体式,使得突起接着可形成纳米喷射器的一体式部分,且因此与储集器成整体式并具有例如锥形形状。在此情况下,可存在末端处具有锥形形状的纳米毛细管,希望经由该纳米毛细管来经由喷射孔口沉积液体。应注意,形状无需为锥形且可具有具预界定形状的喷射孔口,该孔口例如具有可随与其设计相关的参数而变地调整的所需喷射孔口直径。
31.应注意,储集器可具有纵向形状,例如圆柱形形状,该储集器的末端中的每一者处具有开口:直接或间接地连接至突起的第一开口及有可能穿过其中馈送储集器的第二开口。
32.此外,应注意,纳米喷射器的储集器及突起未必为整体式,且可经拆离或拆卸,使得可互换纳米喷射器的突起或储集器。也应注意,机械谐振器、控制构件、激励构件、检测器构件及调节器构件各自可个别地互换。
33.此外,突起可较佳地经功能化。
34.在本发明的上下文中,经功能化突起意指具有如下喷射孔口的突起,该喷射孔口的取决于突起的几何形状的初始几何形状借由在突起中添加元件而经修改。因此有可能借由在突起中添加元件而以某种方式调整突起的喷射孔口的内径及/或外径,使得能够随所需应用而变地修改喷射孔口的几何形状,功能化在系统操作开始之前进行。例如,可借由将纳米管插入突起中而获得不同经功能化突起,该纳米管的一端以构成喷射孔口的方式在突起的表面处突出,该纳米管使用例如胶粘剂固定至突起。纳米管可具有不同直径且由碳、氮化硼、二硫化钼、硅制成。例如,纳米管可具有介于1μm与2μm之间,包括1μm及2μm的长度、介于60nm与200nm之间,包括60nm及200nm的外径、介于5与50nm之间,包括5及50nm的内径。经功能化突起的另一实例可为覆盖有诸如金的贵重材料以保护液体免受例如uv光线影响的突起。
35.喷射孔口可较佳地具有介于5与300nm之间的内径。
36.在本发明的上下文中,不可变形突起意指在沉积期间的系统使用条件下具有稳定尺寸的突起。
37.在本发明的上下文中,固定至该纳米喷射器的机械谐振器意指接触纳米喷射器,使得机械谐振器的振荡被传输至纳米喷射器的机械谐振器。
38.在本发明的上下文中,控制构件意指一方面适于量测机械谐振器的振荡与由激励构件传输至机械谐振器的设定点振荡之间的振荡差,且另一方面适于量测由突起与基板之间的接触引起的振荡变化的构件。
39.例如,可存在作为控制构件的示波器,该示波器以改良伺服控制功能的方式包含或不包含比例校正器(通常被称为p校正器)、积分比例校正器(通常被称为pi校正器)或比例积分微分校正器(通常被称为pid校正器),使得机械谐振器根据设定点振荡而振荡。
40.例如,可存在作为激励构件的压电、磁性激励器或另外存在声学激励器,诸如扩音器。
41.例如,可存在作为检测器构件的装置,该装置包含诸如加速计、光纤或另外包含雷
射的机电微系统。
42.检测器构件可较佳地具有小于或等于105n/m,且为构成纳米喷射器的材料的函数的刚度。
43.构成纳米喷射器的材料必须对待沉积液体具有抗性。例如,若希望在包含砷化镓、二氧化硅、氧化铝、氧化锆或氮化硼的基板上沉积包含诸如盐酸、硫酸、氢氟酸、硝酸或磷酸的强酸的液体,则纳米喷射器可由诸如高密度聚乙烯、聚丙烯、聚氯乙烯、聚偏二氟乙烯或另外聚醚酮的塑料材料组成。
44.在本发明的上下文中,适于控制突起与基板之间的接触的调节器构件意指适于在彼等两元件之间发生接触时控制基板抵靠突起的相互作用力的构件。
45.例如,可存在作为调节器构件的包含比例校正器(通常被称为p校正器)、积分比例校正器(通常被称为pi校正器)或比例积分微分校正器(通常被称为pid校正器)的构件。
46.在本发明的上下文中,至少适于将基板移动为更接近或更远离纳米喷射器的第一移位构件意指适于以某种方式移动基板的构件,使得沿着轴线z将基板移动为更接近或更远离纳米喷射器,以控制基板与突起之间的接触。
47.第一移位构件可连接至适于沿着与轴线z正交的轴线x、y移动基板以产生图案的第二移位构件,三条正交轴线x、y及z形成正三面体。因此,第一移位构件使得能够调节突起与基板之间的接触,且第二移位构件使得能够产生预界定图案。
48.第一移位构件及第二移位构件较佳地包含于单个移位系统中。
49.第一移位构件及/或第二移位构件较佳地包含具有次纳米分辨率的压电马达。
50.储集器可较佳地连接至外部储集器。因此待沉积液体的容积为可调整的。
51.本发明的另一目标在于一种在基板上沉积液体的方法,该方法包含以下步骤:
52.a)取得如上文所界定的系统,
53.b)借由该激励构件激励该机械谐振器以使该机械谐振器开始以振荡频率振荡来开始该突起的经控制振荡,该机械谐振器的该振荡被传输至该突起,
54.c)借助于该第一移位构件将该基板移动为较接近该突起,以便在该基板与该突起之间产生动态接触,该突起在该突起接触该基板的低位置与该突起并不接触该基板的高位置之间振荡,
55.d)由该检测器构件检测该机械谐振器的该振荡,以观察在该突起与该基板之间发生接触时的振荡变化,
56.e)借助于该调节器构件且随振荡变化而变,调整该突起与该基板之间的动态接触,以便在该突起与该基板之间形成弯液面,
57.f)在该突起与该基板之间发生接触期间经由该喷射孔口在该基板上沉积液体。
58.应注意,系统可根据纳米喷射器竖直地定位,即在希望沉积液体的表面与安置纳米喷射器的方向之间的倾斜角接近于90
°
时的组态起作用。
59.应注意,根据本发明的方法,有可能同时进行步骤b)、d)、e)及f)中的至少两者。
60.应注意,沉积可为连续或不连续的,不连续沉积可能为或并非根据预界定图案的,可再现或不可再现的。
61.在本发明的上下文中,动态接触意指在机械谐振器的振荡频率下的不连续或间歇接触。
62.应注意,借助于包含小于1μm的喷射孔口的纳米喷射器,有可能获得厚度介于喷射孔口的直径的1%与150%之间,包括1%及150%,的沉积物。
63.在本发明的上下文中,由机械谐振器的控制构件进行控制意指由以下组成的控制:至少分析振荡频率,及可能也分析与振荡相关的额外参数,诸如振荡的频率、振幅相位或另外激励。
64.该低位置与该高位置之间的距离可较佳地介于1nm与1μm之间,包括1nm及1μm。
65.系统可较佳地进一步包含使纳米喷射器根据可实时修改以产生第一层的轨迹在基板上扫掠的步骤g)。
66.应注意,轨迹可经预界定以便产生所需图案或遵循任何方向。
67.也应注意,第一层可为连续或不连续的。
68.可较佳地在维持了突起与基板之间的恒定且预界定接触的情况下进行扫掠步骤g)。
69.系统可较佳地进一步包含对第一层进行凝固的步骤。此凝固步骤使得能够在第一层上产生第二层期间提供溶解电位及/或降解电位。此凝固步骤可为后续步骤或在沉积期间实时地进行。应注意,此步骤为可选的,因为可能简单地进行在自纳米喷射器提取时本质上较硬的液体的沉积。
70.应注意,根据所沉积液体的性质,凝固步骤的执行是不同的。
71.使纳米喷射器扫掠的步骤g)可较佳地以小于40μm/s的速度进行。
72.应注意,为有利于规则沉积,可能例如减小扫掠速度及/或减小振荡的振幅。此外,同样可使用具有小型粒度范围的包含成溶液物种的液体,该范围即为振荡的振幅的十分之一及为所需沉积物厚度的十分之一。
73.在进行使纳米喷射器扫掠的步骤g)之后,系统可较佳地进一步包含以下步骤:
74.h)由该机械谐振器的该控制构件至少控制该突起与该第一层之间的该接触及该振荡频率,
75.i)在该第一层上沉积一第二层,
76.j)重复前述步骤h)及i),直至获得一所需厚度为止。
77.控制步骤h)使得能够在突起与第一层之间获得自接触,以便防止彼第一层的劣化。
78.本发明的另一目标关注一种如上文所界定系统的用途,其用于增材制造。
79.本发明的另一目标关注一种借由如上文所界定方法获得的产物,该产物包含具有由大于或等于1μm的长度界定的形状的一或多个均匀且稳定层。
80.然而,特定而言在使用连接至纳米喷射器的储集器的外部储集器时,可沉积长度比1μm大得多,例如数千米之层。
81.应注意,所沉积层的最小宽度为突起的外径的最小宽度,且可因此介于例如0.5nm与100μm之间,包括0.5nm及100μm,且较佳地介于5nm与300nm之间,包括5nm及300nm。此外,应注意,所沉积层的高度随液体粘度降低而降低,在纳米喷射器的扫掠速度降低时降低,在振荡的振幅增大时增大,且在突起的内径增大时增大。
82.例如,第一层的厚度与宽度之间的最大比率可大约等于0.4。
83.所获得产物可较佳地包含复数个叠层。
84.应注意,例如借由减小液体的粘度;借由增大突起的渗透率,即借由增大液体在储集器与弯液面之间的给定施力下流过突起的能力;借由增大突起的内部截面;借由增大液体对于基板的材料及突起的外部材料的亲和力;借由使用低谐振频率谐振器以便在仍能够进行检测的同时减小突起的振荡频率并减小振荡振幅,可有利于高位置与低位置之间的弯液面的稳定性。
85.在本发明的上下文中,给定施力意指将经控制压力施加至储集器中的液体。例如,此强制性施力可使用压缩空气进行、借由活塞/气缸系统机械地进行,或另外借由在基板与纳米喷射器之间施加电压来以电方式进行。
86.因此,借助于本发明可能以局部化方式进行印刷以产生具有纳米或微米电路的连接。
附图说明
87.在阅读以下描述后,将更好地理解本发明,该描述仅借助于实例给出且参考以下附图,在附图中:
88.图1表示根据本发明的较佳实施例的系统,
89.图2表示展示可进行以使根据本发明的较佳实施例的系统起作用的步骤的附图。
具体实施方式
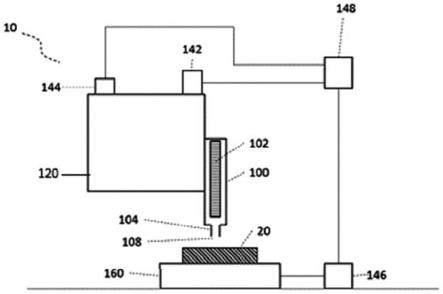
90.图1展示用于基板20上液体的经控制沉积的系统10。
91.例如,可存在作为液体的任何类型的液体,诸如su8 2002溶液、su 8 2010溶液、离子液体、凝胶或糊剂。
92.此处使用的基板为具有小于一纳米的粗糙度的平坦基板。
93.图1系统包含纳米喷射器100,其包含用于储存液体的储集器102,及具有喷射孔口108以用于自储集器102提取液体的不可变形突起104。
94.例如,应注意,可借由使用萨特仪器(sutter instruments)p
‑
2000雷射拉制仪、长度大约等于2cm的圆柱形形状玻璃毛细管,及2毫米长的锥形螺纹来进行雷射拉制而产生储集器102及具有纳米大小的纳米喷射器100。在雷射拉制之后,毛细管的内径在0,5mm至顶点处的几纳米范围内变化。在此组态中,纳米喷射器100具有用于储存液体的管道。管道具有插入有纳米管的锥形端,该纳米管具有用于使突起104功能化的喷射孔口108。管道接着可由玻璃制成且具有大约等于20nm的内径。纳米管可为碳纳米管,其大约1μm长且具有大约等于20nm的外径及大约等于1nm的内径。
95.应注意,为增大可用的待沉积液体的容积,储集器102可连接至外部储集器(图1中未示出)。
96.系统10进一步包含固定至纳米喷射器100的机械谐振器120。
97.机械谐振器120可呈音叉的形式,该音叉的主体在其基座处旋拧至能够借由微米螺钉系统沿着三条空间轴线移动的区块。在此组态中,纳米喷射器100例如使用胶粘剂粘至音叉的凸耳,使得喷射孔口108朝向定位在压电扫描仪上的基板20向下导向。用作储集器102的纳米喷射器100的主体填充有待借助于微米注射器沉积的液体,液体也借由毛细作用填充螺纹。例如,音叉可包含可由铝制成且具有大约等于1cm的直径及大约等于10cm的长度
的分支。纳米喷射器100接着可固定至音叉的自由端。音叉设计成以便能够再现与构成afm中大体上使用的石英音叉的各种元件相同的几何形状及尺寸比率。
98.应注意,机械谐振器120较佳具有充分高的质量因子,以可能在所要频率偏移下调节接触。例如,可能使用质量因子大约为10000的机械谐振器120,以便使得谐振频率与质量因子之间的比率在0.1与20之间,包括0.1与20。
99.系统10进一步包含机械谐振器120的控制构件148。此控制构件148使得能够控制液体在基板20上的沉积。
100.控制构件148特定而言连接至激励构件142以激励机械谐振器120,以使机械谐振器120以振荡频率fi振荡,使得突起104在突起104接触基板20的低位置与突起104不接触基板20的高位置之间振荡,该控制构件在此实施例中为包含第一pid校正器1的振荡器。此实施例中存在作为激励构件142的压电激励器。此压电激励器粘至机械谐振器120。
101.低位置与高位置之间的距离取决于系统的所有特性,例如突起的本质、待沉积的液体、振荡频率、基板20的本质或此外取决于基板20的移动速度。
102.控制构件148此外连接至检测器构件144,其适于检测机械谐振器120的振荡,以便读出机械谐振器120对激励构件142的激励的回应。在此实施例中,检测器构件144为也粘至机械谐振器120的加速计。
103.控制构件148此外连接至调节器构件146,其适于借由控制机械谐振器120的振荡来调整突起104与基板20之间的接触。
104.调节器构件146为第二pid校正器2,且使得能够借助于第一移位构件160来调整接触,该第一移位构件连接至调节器构件且适于沿着轴线z将基板20及纳米喷射器100移动为较靠近在一起或进一步隔开。此外,第一移位构件160连接至适于沿着轴线x及y移动基板20的第二移位构件,三条轴线x、y及z正交且形成正三面体,以使得任何原子能够产生在基板的表面上。为保证高准确度,第一移位构件160及/或第二移位构件包含具有次纳米分辨率的压电马达。特定而言,第一移位构件160及第二移位构件可为单个移位系统的部分。单个移位系统可例如为在上面沉积基板20的压电扫描仪。压电扫描仪具有大约等于50μm的最大行进。
105.此外,聚焦于喷射孔口108的视频摄影机可此外用于观察纳米喷射器100与基板20较靠近在一起的移动。
106.应注意,在此实施例中,基板在压电扫描仪的移动平面与基板的平面之间的倾斜角小于5
°
。
107.下文中参考图2指示使用图1中所示的系统在基板20上沉积液体的方法。
108.在图2中的初步且可选步骤——步骤1中,在使用聚焦于喷射孔口108的视频摄影机情况下,将突起104移动为较接近基板20以移动至小于50μm的距离,该视频摄影机使用为机械谐振器120的音叉的微米螺钉进行聚焦,该距离对应于压电扫描仪的最大行进,压电扫描仪使得后续能够将此两个元件移动为较靠近在一起。
109.在图2中随后步骤(步骤2)中,借由压电激励器激励音叉以使音叉以振荡频率fi振荡,突起104开始经控制振荡。以此方式,音叉的振荡被传输至突起104。
110.因此,在图2中的另一步骤(步骤3')中,可能以判定音叉的谐振频率及其质量因子的方式量测由音叉、压电激励器及加速计组成的系统的谐振。由压电激励器以处于频率f0
下的正常振荡的谐振机械地激励音叉。由具有至多0.5nm的振幅的谐振灵敏度的加速计检测振荡,该振幅在此情况下对应于在系统起作用时的最小振荡振幅,即对应于高位置与低位置之间的最小距离。
111.应注意,例如,压电激励器可经馈送有其频率对应于其机械激励频率的电信号。此电信号的频率由第一pid校正器1调整以控制音叉的振荡,使得由加速计检测的音叉的回应与来自压电激励器的信号同相,使得音叉根据压电激励器的振荡而振荡。此回馈回路的设定点因此为压电激励器的振荡与音叉的振荡之间的相位差为零。音叉接着与压电激励器同相。音叉因此以其谐振频率经激励,该谐振频率取决于其机械性质且还取决于与其环境的相互作用。
112.在图2中可与步骤3'同时执行的另一步骤——步骤3中,可能预界定第二pid校正器2的设定点振荡的相移,彼相移对应于借由突起与基板20之间的预界定接触诱发的相移。例如,此相移可为10mhz。
113.此后,在图2中的另一步骤——步骤4中,借助于压电扫描仪将基板20移动为较接近突起104,以便产生基板20与突起104之间的动态接触。突起104因此在其接触基板20的低位置与其并不接触基板20的高位置之间振荡。
114.应注意,同时,由加速计检测音叉的振荡以观察突起104与基板20之间发生接触后的振荡变化。
115.因此,在突起104与基板20之间发生接触后,修改施加至由音叉及纳米喷射器100组成的总成之力。此修改会修改谐振频率,且因此修改压电激励器的激励频率,该激励频率经维持在音叉的谐振频率下。例如,接着判定在由音叉及纳米喷射器100组成的总成的谐振频率相对于压电激励器的激励频率修改了10mhz(如在步骤3中选定)时实现了动态接触。因此,可能在进行后续步骤之前验证系统未受到谐振频率的时间漂移影响。
116.此后,在图2中的步骤5中,借助于第二pid校正器2且随振荡变化而变,以在突起104与基板20之间形成弯液面的方式调整突起104与基板20之间的动态接触。基板20经置放在纳米喷射器100下具有次纳米移动分辨率的三轴线压电扫描仪上(例如,所用压电扫描仪可为tritor101 piezosystemjena)。第二pid校正器2归功于回馈回路来控制置放在压电扫描仪上的基板20与纳米喷射器100之间的精细接近,直至突起104与基板20之间的接触达到先前选择的10mhz的谐振频率设定点相移为止。音叉的硬度使得能够实现经控制接近,且能够防止由于突起104与基板20之间的弯液面而使突起104与基板20接触时发生快速跳跃型效应。
117.在另一步骤中,在突起104与基板20之间发生接触期间经由喷射孔口108将液体沉积在基板20上。
118.此后,在图2中之后续步骤——步骤6中,借由相对于纳米喷射器100移动基板20,纳米喷射器100沿着可实时修改的轨迹在基板20上扫掠以产生第一层。
119.归功于图2中的步骤5'中的第二pid校正器2调节及控制突起104与基板20之间的接触,借由移动基板20,同时恒定维持与纳米喷射器的相互作用来产生沉积设计。在纳米喷射器100与基板20的表面之间发生相互作用时进行实时检测使得可能防止不可控地损害基板20及纳米喷射器100。
120.第二pid校正器2可保持例如大约10mhz的设定点,或使其增大至几hz,条件为突起
104抵抗此种与基板20间歇接触之力。借由对连接至第二pid校正器2的压电扫描仪的电子控制来相对于基板20界定突起104的轨迹。也界定此轨迹的行进速度。因此,能在维持突起104与基板20之间的恒定且预界定接触的情况下进行扫掠。压电扫描仪接着借助于第二pid校正器2及压电扫描仪以小于40μm/s的设定点速度遵循设定点轨迹且维持10mhz的频率偏移。借由弯液面在低位置与高位置之间的振荡期间的稳定性来调节待不超出的限值速度。
121.在图2中的另一步骤——步骤7'或8中,可能对第一层进行凝固。例如,在沉积了可聚合油墨时,可选择在第一层上进行沉积第二层之前将所获得第一层曝露至uv光。此凝固步骤可与沉积同时进行或之后进行。
122.在完成了沉积时,在图2中的另一步骤——步骤7中,可借由以中断其间的接触的方式使用压电扫描仪来收回基板20或使其移动远离纳米喷射器100。
123.此后,在图2中的步骤9,可使用音叉的微米螺钉粗略地将突起104移动远离基板20,此后收回上面已沉积有第一层的基板20。
124.在此种系统且使用此种方法的情况下,采用:
125.‑
纳米喷射器,其包含:储集器,该储集器具有10mm3的容积(具有大约等于0.5mm2的截面及大约等于2cm的长度的圆柱形形状储集器),且包含作为液体的su8 2002溶液;并具有借由插入碳纳米管而功能化的突起,该碳纳米管具有大约等于50nm的内径及大约等于180nm的外径的喷射孔口,
126.‑
音叉,其具有大约等于1.4.104的质量因子且在大约等于1.5khz的频率下振荡,并使突起在高位置与低位置之间振荡,彼等位置中的每一者为隔开小于10nm的距离,
127.‑
硅基板,
128.‑
基板的移动速度大约等于0.125μm/s,
129.在数微米的长度上获得了厚度大约等于30nm且宽度大约等于150nm的规则且稳定层。
130.在如前所述的相同条件下,在基板的移动速度大约等于0.5μm/s情况下,获得了厚度大约等于5nm且宽度大约等于150nm的规则且稳定油墨层。
131.在如上文所指示的相同条件下,在突起借由插入具有内径大约等于1nm且外径大约等于20nm的喷射孔口的碳纳米管而功能化的纳米喷射器作为纳米喷射器的情况下,在数微米的长度上获得了厚度大约等于700pm且宽度大约等于20nm的规则且稳定油墨层。
132.在另一实例中,使用:
133.‑
作为纳米喷射器的纳米毛细管,其包含具有3mm3的容积且包含su8 2010溶液的储集器,且不具有功能化突起,但具有内径大约等于200nm的喷射孔口,
134.‑
音叉,其具有大约等于1.4.104的质量因子且在大约等于1.5khz的频率下振荡,并使突起在高位置与低位置之间振荡,彼等位置中的每一者为隔开大约等于1nm的距离,
135.‑
硅基板,
136.‑
基板的移动速度小于40μm/s,
137.在大约100μm的数微米的长度上获得了厚度大约等于35nm且宽度大约等于200nm的规则且稳定油墨层。
138.在另一实例中,使用:
139.‑
纳米喷射器,其包含:储集器,该储集器具有10mm3的容积且包含作为液体的离子
溶液(例如,称为bmim pf6的溶液);并具有借由插入碳纳米管而功能化的突起,该碳纳米管具有内径大约等于60nm且外径大约等于5nm的喷射孔口,
140.‑
音叉,其具有大约等于1.4.104的质量因子且在大约等于1.5khz的频率下振荡,并使突起在高位置与低位置之间振荡,此等位置中的每一者为远离小于50nm的距离,
141.‑
硅基板,
142.‑
基板的移动速度介于1与4μm/s之间,包括1及4μm/s,
143.获得了厚度大约等于0.5nm且宽度大约等于20nm的规则且稳定油墨层。
144.在使用此种且预界定轨迹的实例的情况下,可产生诸如正弦形或螺旋形或圆形的复杂形状。
145.增材制造可用于产生三维有序物体。实际上,层也可堆栈于彼此的顶部上,上面刚沉积第二层的第一层可能已预先借由使用任何凝固制程而经凝固。例如,可连续堆栈大约十个层,每一层具有大约等于100nm的厚度,以便产生具有圆形形状且具有大约等于1.5μm高的总厚度及8μm直径的堆栈。
146.也可以形成具有厚度为300nm的相交点的交叉物方式使两个层交叉,该厚度等于可为单层厚度的150nm的两倍,每一层具有大约等于100nm的厚度。
147.已在上文描述及图式中详细地展示及描述本发明。上文描述必须被视为说明性的且借助于实例给出而不将本发明限于此单个描述。众多变化形式实施例是可能的。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。