1.本发明涉及转向操作装置,该转向操作装置连接到转向机构,由液压机构向该转向机构施加转向力的一部分。
背景技术:
2.在相关技术中已知一种液压动力转向操作装置,该液压动力转向操作装置通过经由液压控制阀将来自油泵的液压油供应至与转向机构耦接的动力缸来向车辆的转向机构施加辅助力。
3.例如,在日本未审查专利申请公开第2017
‑
56745号(jp 2017
‑
56745a)中描述的液压动力转向操作装置是除液压之外还将来自电动马达的辅助力施加到转向机构的装置。在液压动力转向操作装置中,通过基于电动马达的转速信号检测转向操作扭矩,可以减少设置在转向操作装置中的扭杆的数量,并且可以抑制驾驶员的转向操作角与转向轮的转向角之间的相位差。
技术实现要素:
4.发明人发现,转向轮的转向相对于驾驶员的操作的延迟并非仅基于外部安装到转向操作轴的扭杆。作为认真的实验和研究的结果,发明人发现,特别是当在s型弯道上行驶的时候进行重复转动方向盘以及回转方向盘的转向操作时,由于液压机构的反应迟缓(松散(looseness)),与设想的情况相比,转向角相对于驾驶员的转向操作延迟得更多。
5.本发明提供了能够抑制实际转向角相对于目标转向角的延迟的转向操作装置。
6.根据本发明的一个方面,提供了一种转向操作装置,该转向操作装置连接至转向机构,由液压机构向该转向机构施加转向力的一部分。转向操作装置包括:电动马达,其输出驱动力,该驱动力被施加到转向机构;旋转角检测器,其基于电动马达的旋转检测旋转角并输出检测到的旋转角;以及转向操作控制装置。转向操作控制装置被配置成:获取目标转向角,该目标转向角是转向轮的转向角的目标值;控制电动马达以使得转向轮的转向角达到目标转向角;使用检测到的旋转角作为输入,基于延迟模型来估计转向轮的实际转向角相对于目标转向角的延迟;输出延迟信息;以及基于延迟信息来校正目标转向角。
7.根据该方面,可以抑制转向轮的实际转向角相对于目标转向角的延迟。
附图说明
8.下面将参照附图描述本发明的示例性实施方式的特征、优点以及技术和工业意义,其中类似的附图标记表示类似的元件,并且在附图中:
9.图1是示意性地示出包括转向操作装置的转向操作系统的图;
10.图2是示出转向操作装置的功能配置的框图;
11.图3是示出实际转向角相对于目标转向角延迟的状态的曲线图;
12.图4是示出转向操作装置的功能配置的另一示例的框图;以及
13.图5是示意性地示出包括转向操作装置的转向操作系统的另一示例的图。
具体实施方式
14.在下文中,将参照附图描述根据本发明的实施方式的转向操作装置。在以下实施方式中描述的数值、形状、材料、组件、组件间的位置关系和连接状态、步骤和步骤的顺序仅是示例,而不旨在限制本发明。在以下描述中,可以将多个发明描述为一个实施方式,并且未在权利要求中描述的元件被认为是根据权利要求的发明的任意元件。附图是通过适当的强调、省略和比例调整来描述本发明的示意图,并且可能未反映实际的形状、位置关系和比例。
15.图1是示意性地示出包括转向操作装置的转向操作系统的图。转向操作系统是根据目标转向角使转向轮220转向并改变安装有转向操作系统的车辆的行驶方向的系统。转向操作系统包括转向机构230、液压机构240和转向操作装置100。
16.转向机构230是使转向轮220转向的机构。转向机构230没有特别限制,在该实施方式中使用齿条和小齿轮。具体地,转向机构230包括小齿轮轴231、齿条轴232和横拉杆233。
17.小齿轮轴231是包括与设置在齿条轴232中的齿条啮合的小齿轮的杆状构件。小齿轮轴231连接到转向操作装置100并利用从转向操作装置100施加的扭矩进行旋转,使得齿条轴232在齿条轴232的轴向方向上移动。
18.齿条轴232是包括与小齿轮轴231啮合并且设置在小齿轮轴231的外周表面的一部分上的齿条的构件,齿条轴232将小齿轮轴231的旋转转换为在齿条轴232的轴向方向上的平移,并且通过横拉杆233使转向轮220转向。液压机构240连接到齿条轴232,并且将用于使转向轮220转向的转向力(即辅助力)的一部分以液压方式施加至齿条轴232。齿条轴232容纳在附接至车身的齿条壳体中并且由齿条壳体引导齿条轴232的移动。
19.液压机构240基于小齿轮轴231的旋转角等来调整液压,并将齿条轴232的轴向方向上的力作为转向力的一部分施加到齿条轴232。液压机构240没有特别限制,在该实施方式中包括动力缸241、旋转阀242、油泵243和贮存箱244。
20.动力缸241包括由活塞245分隔成两个空间的缸246,并且活塞245通过调节用来填充两个空间的油的液压而在齿条轴232的轴向方向上移动。活塞245连接到齿条轴232,并且活塞245向齿条轴232施加在移动方向上的力。
21.旋转阀242是对供应至由活塞245分隔的两个空间的液压进行调节的装置。旋转阀242的结构没有特别限制,在该实施方式中包括置于小齿轮轴231和转向操作装置100之间的扭杆(未示出)。旋转阀242通过以下方式来控制活塞245的操作:对随着由于扭杆的扭转引起的内阀和外阀的相对运动从油泵243供应的并且供应至由活塞245分隔的两个空间之一的油的量进行调节,以及对其他空间中的过量的油中的再循环至贮存箱244的油的量进行调节。
22.转向操作装置100是机械地将关于转向角的指令施加至转向机构230并使转向机构230让转向轮220转向的装置,并且包括电动马达110、旋转角检测器120和转向操作控制装置130。
23.电动马达110输出被施加到转向机构230的驱动力。将由电动马达110产生的驱动力传递至转向机构230的传递方式没有特别限制,在该实施方式中,在其中未插入减速齿轮
的情况下,电动马达110连接到转向操作轴构件111,转向操作轴构件111连接到转向机构230的小齿轮轴231,并且电动马达110以1:1的旋转比将电动马达110的输出轴的旋转传递至小齿轮轴231。作为从电动马达110施加到转向机构230的转向力的马达转向力远小于作为从液压机构240施加到转向机构230的转向力的液压转向力。例如,用于使转向轮220转向的大部分力是液压转向力,马达转向力作为用于控制转向轮220的转向角和转向方向的控制力(控制信息)被传递至转向机构230。
24.旋转角检测器120是基于电动马达110的旋转来检测用于控制液压机构240的旋转角并输出检测到的旋转角的装置。在该实施方式中,由于控制液压机构240的旋转阀242的旋转角与该电动马达110的旋转角之比为1:1,因此旋转角检测器120是检测电动马达110的输出轴的旋转角并输出检测到的旋转角的装置。旋转角检测器120的类型没有特别限制,在该实施方式中,旋转角检测器120具有包括与电动马达110的输出轴一起旋转的主齿轮以及与主齿轮啮合的具有不同直径的两个副齿轮的构造,并且该构造可以通过使用霍尔元件等检测设置在副齿轮中的永磁体的旋转来检测输出轴的旋转方向以及旋转角。
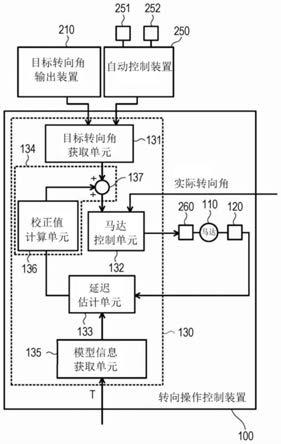
25.图2是示出转向操作装置的功能配置的框图。转向操作控制装置130是控制电动马达110以使得电动马达110运转与目标转向角对应的输出轴的旋转角的装置,并且转向操作控制装置130是电子控制单元(ecu)。转向操作装置100包括目标转向角获取单元131、马达控制单元132、延迟估计单元133和校正单元134作为通过执行程序来实现的处理单元。在该实施方式中,转向操作装置100还包括模型信息获取单元135作为处理单元。
26.目标转向角获取单元131获取用于使转向轮220转向的目标转向角。在该实施方式中,目标转向角获取单元131从目标转向角输出装置210或自动控制装置250获取目标转向角。
27.目标转向角输出装置210是输出当驾驶员操作诸如方向盘的操作构件211时驾驶员期望的目标转向角的装置。在该实施方式中,如图1中所示,目标转向角输出装置210包括操作构件211、轴构件212和目标转向角检测器213。目标转向角输出装置210还可包括扭矩检测装置和反作用力装置。
28.轴构件212是机械地连接到操作构件211并且响应于操作构件211的操作而旋转的杆状构件。在该实施方式中,轴构件212连接到反作用力装置并且反作用力被施加到轴构件212,该反作用力用于将基于驾驶状况等的转向操作感提供给操作操作构件211的驾驶员。
29.轴构件212与转向机构230之间的连接模式没有特别限制,例如,轴构件212可以通过转向操作轴构件111机械地连接到小齿轮轴231,或者在自动驾驶期间可以使用离合器等将轴构件212和小齿轮轴231之间的机械连接切断。在该实施方式中,轴构件212和转向机构230没有机械地连接,并且转向操作系统是所谓的无链接线控转向操作系统。
30.目标转向角检测器213是检测操作构件211的旋转角并将检测到的旋转角作为目标转向角进行输出的装置。在该实施方式中,目标转向角检测器213检测轴构件212的旋转作为操作构件211的旋转。目标转向角检测器213的类型没有特别限制,例如,可以使用解析器(resolver)、旋转编码器或与附接至电动马达110的旋转角检测器120相同的装置。
31.自动控制装置250是自动驱动安装有转向操作系统的车辆的ecu。在该实施方式中,自动控制装置250例如从摄像机251或诸如激光雷达的传感器252获取关于车辆外部的障碍物、白线、信号等的信息,基于获取的信息顺序地生成对应于自动驾驶的目标转向角,
并将生成的目标转向角输出至目标转向角获取单元131。
32.马达控制单元132基于由目标转向角获取单元131获取的目标转向角控制电动马达110,使得转向轮220的转向角达到目标转向角。在该实施方式中,向电动马达110供应来自包括多个开关元件的pwm(脉宽调制)逆变器260的电力。马达控制单元132执行用于基于转向轮220的目标转向角和实际转向角之间的差来控制电动马达110的马达扭矩的角度反馈控制。通常将pid(比例积分微分)控制用作角度反馈控制。具体地,通过分别将目标转向角与实际转向角之间的差的项、该差的积分项和该差的微分项乘以比例增益、积分增益和微分增益,并将这些项相加来计算目标扭矩,以及将目标扭矩作为电流指令值输出到pwm逆变器260。
33.延迟估计单元133是使用检测到的旋转角作为输入,基于延迟模型来估计转向轮220的实际转向角相对于从目标转向角获取单元131获取的目标转向角的延迟并且输出延迟信息的处理单元。延迟模型是可以通过线性或非线性算术运算得到液压机构240的延迟状态的模型。例如,可以将延迟系统的传递函数例示为一个延迟模型。具体地,下述表达式1表示一阶延迟系统的模型。
34.g(s)=1/(1 ts)
ꢀꢀꢀ
表达式1
35.关于与转向轮220的目标转向角(φtag)相对应的转向操作柱轴上的目标角(θtag),当在跟随时实际延迟的转向轮220的转向角(φreal)被定义为被转换至转向操作轴的转向角(θreal)时,g(s)是在将θtag作为输入并将θreal作为输出的情况下输出相对于输入的延迟系统的传递函数。
36.t是传递函数g(s)=1/(1 ts)的时间常数。
37.校正单元134包括校正值计算单元136和加法器单元137。校正值计算单元136基于延迟信息计算作为目标转向角的校正值的角度补偿值。加法器单元137通过将角度补偿值——即指示角度的延迟信息——与由目标转向角获取单元131获取的目标转向角相加(其包括负角度的相加,即相减),来校正目标转向角。
38.模型信息获取单元135获取基于目标转向角和转向轮220的实际转向角获取的关于延迟模型的模型信息。例如,当延迟模型是由表达式1表示的模型时,模型信息为t,并且模型信息获取单元135获取并存储该输入t并将t输出到延迟估计单元133。
39.通过实际使车辆行驶,可以获取如图3中所示的转向轮220的实际转向角相对于目标转向角的延迟状态,并且可以将基于所获取的数据得到的t输入到模型信息获取单元135。因此,即使当转向操作系统具有不同类型时,通过得到t并将得到的t输入到转向操作装置100,也可以使安装在不同类型的转向操作系统中的转向操作装置100通用化。
40.利用设置在上述转向操作系统中的转向操作装置100,例如,即使在如在s型弯道上交替进行方向盘的转动和回转的情况下,也可以预先估计基于液压机构的松散的延迟,并且可以控制电动马达110以使得不发生延迟。
41.在自动驾驶中,由于抑制了转向轮220的实际转向角相对于从自动控制装置250输出的目标转向角的延迟,因此可以提高车辆行驶中的安全性。
42.通过使液压机构240产生用于使转向轮220转向所需的大部分转向力,可以实现电动马达110的尺寸的减小和转向操作装置100的整体尺寸的减小。因此,可以提高转向操作装置100的布置位置方面的自由度。
43.本发明不限于上述实施方式。例如,通过组合本说明书中描述的元素并排除一些元素而实现的实施方式被包括为本发明的实施方式。通过在不脱离本发明的主旨——即权利要求中描述的词语的含义——的情况下执行由本领域技术人员考虑的各种修改而获得的修改示例包括在本发明中。
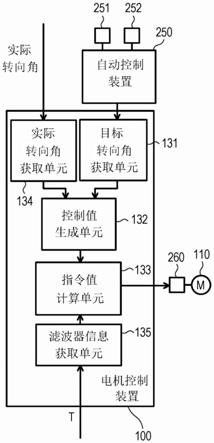
44.例如,延迟估计单元133可以是已经通过监督学习、无监督学习、强化学习等训练的人工智能(ai)。在这种情况下,如图4中所示,可以由模型信息获取单元135获取关于——由训练单元270使用包括从目标转向角获取单元131获取的目标转向角和实际转向角的输入训练的——人工智能的信息,作为模型信息。
45.如图5中所示,转向操作系统可以是其中转向操作轴构件111和轴构件212机械地连接以使得驾驶员操作操作构件211时的扭矩作为转向力的一部分被机械地传递到转向机构230的系统。
46.如图5所示,电动马达110可以经由减速齿轮将扭矩传递到转向操作轴构件111。
47.上面已经描述了其中旋转角检测器120布置在电动马达110和小齿轮轴231之间的示例。然而,只要可以检测转向轮220的转向角,旋转角检测器120就可以布置在电动马达110和转向轮220之间的任何位置。在这种情况下,延迟估计单元133估计“旋转角检测器120和转向轮220之间的响应延迟”加“转向角控制pid的响应延迟”,这与“目标转向角和转向角之间的响应延迟”匹配。
48.本发明适用于车辆,特别地,适用于转向轮的转向需要大的力的大型车辆、农用车辆、工程车辆等。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。