1.本发明涉及一种用来对于相对于电子控制器的操控信号能够成比例地调节的连续阀进行校准的方法,所述校准考虑到所述操控信号在下述工作点中的偏移:该工作点具有在所述连续阀之上的预先给定的压力差以及通过所述连续阀的预先给定的体积流量。通常这种连续阀能够直接地以电的方式或电动液压的方式借助于比例电磁体来操纵。例如安装在移动式的作业机械(如挖掘机)处之后,在运行中通过这种连续阀能够将压力流体从液压泵的压力接头输送给液压消耗器,所述液压泵的、在其数值方面能够被检测的排量能够被调节,并且所述液压泵的泵压力能够被调控。
背景技术:
2.由于制造原因,能电动比例地调节的连续阀在通流横截面特性曲线中相对于穿过比例电磁体的电流具有散度。通常所述连续阀的系列散度(serienstreuung)存在于所述操控信号的基本上恒定的偏移。也就是说,对于所期望的通流横截面而言,所述操控信号以固定的值为幅度小于或大于理论上的值。已知的是,为补偿制造散度就测量已被制造的连续阀,并且将由电子控制器来操控的连续阀的特性曲线存储在控制器中。可以替代的是,在制造中设定所述连续阀,以便减小散度。两种处理方式都带来高耗费。附加的是,控制器以及由所述控制器来操控的连续阀相互固定地配设。这使得连续阀之后的更换变得困难。
3.如果所述控制器自身识别出各个连续阀的操控信号的偏移在散度宽度之内有多大、并且生成并保存所述连续阀的单独的特性曲线,那么就能够避免或者至少减小用于考虑所述散度或者约束所述散度本身的耗费,并且能够简化连续阀之后的更换。
4.从us 2017 262 001 a1已知一种用于此的方法。在那里提出,使得所述液压泵的确定的输送量首先经由一具有已知的通流横截面的校准量孔来流向储箱,并且然后在关闭的校准量孔的情况下流动通过所述连续阀,并且一直改变用于所述连续阀的操控信号,直至通过所述连续阀的压力下降与之前通过所述校准量孔的压力下降一样大。所述泵压力以及因此在所述校准量孔上游的压力通过压力传感器来检测。在相同的通流量和相同的压力下降时,所述连续阀的通流横截面然后与所述校准量孔的通流横截面一样大,从而已知如下工作点,该工作点具有所述操控信号的确定的值以及所述通流横截面的、与所述操控信号的确定的值相关联的确定的值。如果已知所述阀特性曲线的除偏移本身之外的变化曲线,那么就如此移动所述阀特性曲线:使得所述工作点位于所述阀特性曲线上。
5.对于从us 2017 262 001 a1已知的方法的执行而言,校准量孔是必需的。即使将所述校准量孔集成到存在于所述液压系统中的能连续调节的旁通阀(通过所述旁通阀能够使得压力介质从所述液压泵的压力接头流出到储箱)中,这还是意味着提高的耗费。根据us 2017 262 001 a1,这种旁通阀具有一静止位置,在压缩弹簧的作用下占据所述静止位置,并且在所述静止位置中存在从所述液压泵的压力接头到所述储箱去的被用作校准量孔的、已被校准的通流横截面。借助于比例电磁体能够将所述旁通阀从所述静止位置经由一位置——在所述位置中关闭所述旁通阀并且不存在从所述液压泵到所述储箱去的通流横截
面——带到下述位置:在所述位置中设定不同大小的通流横截面。这意味着,在所述旁通阀的关闭的位置中所述比例电磁体被通电。如果想要具有所述旁通阀的以无电流的方式来关闭的位置,那么就可能需要第二电磁体,通过所述第二电磁体会将所述旁通阀带到下述位置:在所述位置中打开已被校准的通流横截面。
技术实现要素:
6.因此,本发明基于的任务是,给出一种方法,利用该方法能够以简单的方式在所述液压系统(连续阀是所述液压系统的组件)之内通过电子控制器来校准连续阀。
7.对于被布置在开始时所描述的液压系统之内的连续阀而言,所述任务通过带有根据本发明的方法步骤的方法来解决。
8.因此,在关闭的连续阀的情况下将泵压力调控到预设压力。检测至少对于所述液压泵的排量而言的值。这也可以通过下述方式来实现:检测用于所述液压泵的调节装置的操控信号——从所述操控信号得出所述排量,并且借此使得所述排量本身并不已知或者至少不准确地已知。现在通常将以斜盘
‑
或斜轴结构形式的轴向活塞泵用作液压泵。在其中,在考虑所述轴向活塞的大小和数量的情况下,通过斜盘的摆动角或者通过滚筒的摆动角来给出所述排量。从初始操控信号出发来改变所述连续阀的操控信号,直到检测与所述预先给定的体积流量相对应的、在当前的泵体积流量与在所述连续阀的关闭的通流横截面的情况下所给定的泵体积流量之间的差。
9.根据本发明的方法能够以有利的方式进一步来设计。
10.原则上可考虑的是,在高的初始操控信号、即高的开始电流以及因此大开的连续阀的情况下来开始,并且一直减小所述操控信号,直至所述液压泵提供预先给定的体积流量。特别优选的是,然而从初始操控信号——在该初始操控信号时关闭所述连续阀——来提高所述连续阀的操控信号。只要尽管提高所述操控信号,所述连续阀还是关闭着,那么就不改变所述液压泵的输送量。一旦所述连续阀开始打开,那么体积流量就能够流动通过所述连续阀。这种压力调控致使所述液压泵的排量得以增大,因而维持所述预设压力。用于所述连续阀的操控信号进一步提高,直至达到在通过所述液压泵的当前的排量和当前的转速所得出的当前的泵体积流量与在打开所述连续阀的通流横截面之前通过所述液压泵的排量和转速所给定的泵体积流量之间的、与所述预先给定的体积流量相对应的差。因此,流动通过所述连续阀的体积流量等于由所述液压泵所输送的体积流量的变化。即使当不准确地确定由所述液压泵在打开连续阀的情况下所输送的体积流量以及当前的体积流量时,与所述体积流量的绝对数值相比较也还是能够非常准确地获取在体积流量中的变化。沿着相同方向的并且以至少几乎相同的程度为幅度的不准确性,在所述差中并不起作用。因此,在没有附加的机械上的耗费的情况下可以确定流动通过所述连续阀的体积流量。最后,通过将在达到所述预先给定的体积流量时所检测的、所述连续阀的操控信号与理论上的操控信号相比较,来确定所述操控信号的偏移。各个方法步骤在开始信号之后自动地由所述电子控制器来执行,其中,至少从所述连续阀开始打开起,各个方法步骤就自动地由所述电子控制器在一秒的范围中的非常短的时间内被执行。
11.原则上可考虑的是,所述液压泵的调节和调控装置包括必要时也能调节的压力调控器,用于压力调控的泵压力被液压地引导回到所述压力调控器上。然而显得更简单的是,
所述泵压力能够通过压力传感器来检测,所述压力传感器的、用来将所述泵压力调控到所述预设压力的电输出信号由所述电子控制器来使用,或者由直接地安装到所述液压泵之上的电子器件、所谓的板载电子器件来使用。
12.可以规定的是,所述液压泵的排量通过排量传感器利用电输出信号来检测,并且因此以电的方式引导回去。然后能够通过简单的电操控的换向阀、例如通过能成比例地调节的带有三个液压接头的换向阀,来实现压力流体相对于所述液压泵的调整活塞系统的输送和排出。其中,从所期望的排量与由排量传感器所检测的排量之间的差来得出用于所述换向阀的操控信号。如果存在所期望的排量,那么所述换向阀就处于下述调控位置中:在该调控位置中与所述调整活塞系统的调整腔室相连接的阀接头以小的正的或负的覆盖度来对着压力接头并且对着储箱接头进行阻塞。从所述调控位置移动出来之后,所述调整腔室的压力流体流到所述调整腔室或者从所述调整腔室流出,并且所述排量发生改变。
13.所述液压泵的排量也可以相对于电的泵操控信号能成比例地调节。然后谈及电动比例的(ep
‑
)调控。在此,对于所述液压泵的排量进行确定的元件(例如所述斜盘)的位置,通过反馈弹簧作为力来引导回到调控阀的阀活塞上。与所述反馈弹簧的力相反,比例电磁体作用到所述阀活塞上,所述比例电磁体的力取决于流动穿过它的电流的大小。如果弹力与磁力一样大,那么所述调控阀就处于下述调控位置中,在所述调控位置中放弃一下泄漏量的补偿,压力流体既不流入调整腔室也不从所述调整腔室流走。所述液压泵的排量不发生变化。如果所述磁力由于流动穿过电磁铁的电流的变化而提高或者降低,那么在所述阀活塞处的力平衡就受到干扰,并且所述阀活塞就从所述调控位置移动出来。压力流体流入所述调整腔室或者从所述调整腔室流走,所述斜盘改变其位置,直至又存在随着所述斜盘的位置发生变化的、所述反馈弹簧的力与所述磁力之间的平衡。因此在ep
‑
调控中能够借助于所述泵操控信号的值来确定:达到当前的泵体积流量与在打开所述通流横截面之前的泵体积流量之间的确定的差,在考虑所述泵操控信号的在提高所述排量之前的值以及预先给定的确定的泵体积流量差的情况下,计算出所述泵操控信号的值。所述泵操控信号在此是流动通过所述比例电磁体的电流。
14.所述连续阀优选是具有正好两个接头的阀,从其功能来看因此是一种能调节的节流阀。
15.原则上可考虑的是,在执行所述方法时所述液压泵的转速发生变化。然后从在此刻存在的排量并且从在此刻存在的转速,得出在所述连续阀开始打开时的泵体积流量。从所述当前的排量以及当前的转速得出在所述连续阀的操控信号的增大期间相应当前的泵体积流量,从而在转速变化时必须持续地计算出所述泵体积流量,直至达到当前的泵体积流量与在所述连续阀开始打开时所存在的泵体积流量之间的预先给定的差。
16.相反,如果在用于所述连续阀的操控信号的变化期间所述液压泵的转速至少几乎是恒定的,那么就能够利用所述转速计算出所述排量的值,此外达到在泵体积流量中的预先给定的差,并且因此达到流动通过所述连续阀的体积流量的预先给定的值。仅仅还需要观察所述排量的值,并且不需要连续地计算体积流量。所述排量的这个值因此能够从方法步骤一和二期间的、所述排量的值以及所述转速的值来获取。
17.当在执行方法步骤三期间压力流体流向液压消耗器,其中已知或者能够估计所述液压消耗器的负载压力时,所述方法在液压系统没有特殊的设计的情况下是可行的。那么
不需要附加的阀:通过所述阀使得流动通过所述连续阀的压力流体量能够流向所述储箱。例如,在校准所配设的连续阀时可以使得挖掘机的设备的斗杆和铲斗自由地悬吊,从而使得负载压力为零。因而在所述连续阀上的压力差等于预设压力。在校准过程期间一定的压力流体量流向斗杆缸以及铲斗缸,从而使得它们的位置发生变化,并且因而所述负载压力也有所变化。然而所述方法能够非常快地进行,从而使得流入的压力流体量少。所述压力差也仅仅以其方根来包含到所述体积流量中。在执行所述方法期间,悬臂能够通过斗杆和铲斗来放置在地上。
18.也可考虑的是,测量所述负载压力,并且将所述预设压力——所述液压泵被调控到所述预设压力上——分别以预先给定的差为幅度设置超过所述负载压力。
19.在移动式的作业机械处的所述液压消耗器通常是双重作用的液压缸,为对其进行控制主要设置有待校准的连续阀。那么除用于每个液压缸的连续阀之外还存在主控制阀,利用所述主控制阀能够控制所述液压消耗器的运动方向,但是体积流量节流也是可行的。所述主控制阀具有两个与所述液压消耗器进行流体连接的消耗器接头、与所述连续阀进行流体连接的供应接头、以及储箱接头。这时特别有利的是,在所述方法步骤一至三期间所述液压消耗器的负载较低侧通过所述主控制阀与所述连续阀进行流体连接。那么所述方法能够在下述情况中来执行:在所述情况中,在液压缸的、与负载侧相对值的一侧上的压力为零或者接近于零。
20.所述液压系统——在该所述液压系统之内布置有待校准的连续阀——也可以包括能连续地调节的旁通阀,利用所述旁通阀能够控制所述液压泵的压力接头与储箱之间的通流横截面。即使当所述主控制阀是那种具有关闭的中间位置的主控制阀时,由此仍然能够根据液压消耗器的被称为积极控制(positive steuerung(positive control))的控制方式来获得负载感知性(lastf
ü
hligkeit)。在中性位置中,所限定的压力流体量(例如30 l/min)从所述液压泵经由旁通阀流向储箱。如果操纵液压消耗器,那么就操控所述主控制阀、所述连续阀以及所述旁通阀,并且它们的阀活塞相对于操控信号的大小成比例地移动。由此减小所述旁通阀的通流横截面,并且同时打开在所述主控制阀处的以及在所述连续阀处的通流横截面。与此同时,泵成比例地向外摆动。一旦所述泵压力大于所述负载压力,油就流向消耗器。有利的是,在所述方法步骤一至三期间打开所述旁通阀。所述旁通阀在此被设置到这样的在校准时恒定的通流横截面:使得在所述方法步骤一至三期间通过所述液压泵的输送量能够将所述泵压力调控到预设压力上。所述旁通阀的太大的通流横截面会导致,在所述液压泵的最大的排量的情况下也无法达到所述预设压力。
21.在附图中示出具有有待校准的连续阀的液压系统、以及具有下述量的时间变化曲线的不同的图表:在对于根据本发明的方法的实例进行执行期间的电流、通流横截面、泵压力以及液压泵的输送量。现在借助于所述附图来进一步地解释本发明。
附图说明
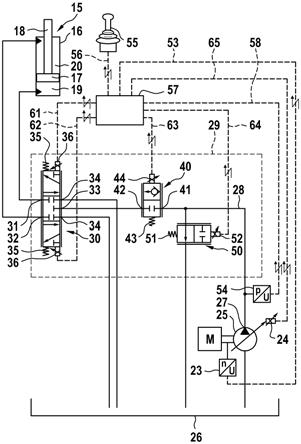
22.其中示出:图1示出以简化的方式仅仅用液压缸和相应的阀来示出的液压系统的线路图,其中,所述液压系统处于初始状态中;图2示出能够用在根据图1所述的液压系统中的调节泵的线路图,该调节泵具有排
量的电动比例的设定;图3示出三张图,具有在连续阀处的不同参量的图示,即:预先给定的压力差;电流——利用其来操控有待校准的连续阀的电磁体;以及在下述时间期间流动穿过所述连续阀的体积流量,在该时间内执行根据本发明的方法;图4示出四张图,具有在初始状态中以及在下述时间的彼此相继的阶段内的附加的参量的图示,在该时间期间执行根据本发明的方法;图5示出根据图1在第一时段期间的状态中在执行用于校准的方法时的线路图;图6示出根据图1在第二时段期间的状态中在执行用于校准的方法时的线路图;图7示出根据图1在第三时段期间的状态中在执行用于校准的方法时的线路图;并且图8示出能够用在根据图1所述的液压系统中的调节泵的线路图,在该调节泵中能够通过摆动角传感器来检测所设定的排量。
具体实施方式
23.根据图1的液压系统包括被构造为差动缸的双重作用的液压缸15,该液压缸例如用于使得挖臂的组件发生运动,并且该液压缸具有一缸壳体16,活塞17(活塞杆18在一侧上从该活塞伸出)将该缸壳体的内室分成活塞杆远侧的缸室19和活塞杆侧的缸室20。
24.此外,根据图1的液压系统包括一能够借助于调节装置24在液压泵的排量方面在最小值与最大值之间在一侧上进行调节的液压泵25,该液压泵被构造为呈斜盘结构形式的轴向活塞泵,并且该液压泵能够例如由柴油机来驱动。所述液压缸15以及通常另外未被示出的液压缸或液压马达能够单个地或者也能够同时地由所述液压泵25来供给压力流体。所述液压泵25从储箱26抽吸压力流体,并且经由压力接头27将其排放到泵管路28中。所述液压泵25的转速由转速传感器23来检测。
25.压力流体到所述液压缸15去的以及从所述液压缸15而来的流入以及流出由阀系统来控制,所述阀系统的各个阀被组合成阀盘29,该阀盘能够与相同的或相似的结构的其它阀盘共同构造为控制块。主阀30属于所述阀系统,利用该主阀确定下述方向:所述液压缸15的活塞杆18沿着该方向进行运动;并且该主阀具有一消耗器接头31,该消耗器接头与所述液压缸15的缸室19进行流体连接;并且该主阀具有一消耗器接头32,该消耗器接头与所述液压缸的缸室20进行流体连接;并且该主阀具有一泵接头33,所述液压泵25能够为该泵接头输送压力流体;并且该主阀具有两个储箱接头34,压力流体能够从所述两个储箱接头流出到所述储箱26中。所述主阀30的未进一步示出的控制滑块在两个回位弹簧35的作用下占据在图1中所示出的中间位置,在该中间位置中所述主阀的接头互相阻塞。因此也可以说是带有被阻塞的中间位置的阀盘(关闭的中心控制盘(closed
‑
center
‑
steuerscheibe))。借助于两个分别能够通过比例电磁体36来调节的压力调控阀,使得控制滑块能够相对于操控信号成比例地连续地从所述中间位置出来朝一侧或者另一侧得到调节。在沿着一个方向进行运动时,所述消耗器接头31以及因此所述缸室19朝所述泵接头33打开,并且所述消耗器接头32以及因此所述缸室20朝储箱接头34打开,从而使得由所述液压泵来输送的压力流体能够流向所述缸室19,并且压力流体能够从所述缸室20流走到所述储箱26。在所述控制滑块从中间位置出来沿着相反的方向进行运动时,所述消耗器接头32以及因此所述缸室20
朝所述泵接头33打开,并且所述消耗器接头31以及因此所述缸室20朝储箱接头34打开,从而使得由所述液压泵来输送的压力流体能够流向所述缸室20,并且压力流体能够从所述缸室19流走到所述储箱26。
26.在所述液压泵25的压力接头27与所述主阀30的泵接头33之间布置能够相对于操控信号成比例地调节的连续阀40,该连续阀具有两个工作接头41和42,其中,输入接头41与所述泵管路28进行流体连接,并且输出接头42与所述主阀30的泵接头33进行流体连接。在回位弹簧43的作用下,所述连续阀40占据如下静止位置,在该静止位置中使得所述两个工作接头相互阻塞。所述连续阀40能够从静止位置连续地调节直至最大打开位置。在从静止位置调节出来时,穿过所述连续阀的通流横截面变得越来越大直至最大值。借助于能够通过比例电磁体44来调节的先导阀(pilotventil)使得所述调节以电动液压的方式来实现,从而使得所述连续阀40的通流横截面终究取决于下述信号,利用该信号来操控所述比例电磁体44,因此取决于流动通过所述比例电磁体的电流。当在所述连续阀的接头42处的压力高于在接头41处的压力、即高于在所述泵管路28中的泵压力时,所述连续阀40就附加地用作负载保持阀并且关闭。
27.能连续地调节的旁通阀50连接到所述泵管路28,通过该旁通阀使得压力流体能够从所述泵管路28直接流出到储箱26。在所述回位弹簧51的作用下,所述旁通阀50占据静止位置,在该静止位置中打开在所述泵管路28与储箱26之间的最大的通流横截面。所述旁通阀50在连续地下降的通流横截面的情况下能够从所述静止位置被调节到关闭位置中,在该关闭位置中不再有压力流体能够从所述泵管路经由旁通阀流向储箱。比例电磁体52用于所述调节。
28.在所述泵管路中的压力由压力传感器54来检测。
29.利用电输入设备55能够规预先给定方向和速度,所述液压缸的活塞和活塞杆应该以该方向和速度来运动。所述输入设备55的电信号通过电导线56输送给带有微控制器的电子控制器57,所述电子控制器此外通过电导线53从转速传感器23获得电信号——该电信号表示所述液压泵25的转速;并且所述电子控制器通过电导线58从所述压力传感器54获得电信号——该电信号表示在所述泵管路28中的压力、即泵压力。所述主阀30的两个比例电磁体36、所述连续阀40的比例电磁体44、所述旁通阀50的比例电磁体52以及用来对于所述液压泵25的排量进行调节的调节装置24的比例电磁体59通过电导线61、62、63、64和65与电子控制器57相连接并且由所述电子控制器根据所述输入设备55的信号、根据所述液压系统的状态并且根据对于用于校准所述连续阀40的方法进行的启动来通电。
30.所述液压泵25的排量通过在图2中进一步示出的调节装置24根据电动比例的(ep
‑
)调控以重叠的最大压力调控来构造。然而在包含所述压力传感器54的信号的情况下,也可以调控在最大压力之下的压力。所述调节装置24包括如下调整活塞73,该调整活塞能够直线地移动并且限定调整腔室74,在由两个调控阀进行控制的情况下使得压力介质能够流向该调整腔室,并且能够通过所述调控阀从该调整腔室挤出压力介质。在存在于所述调整腔室74中的压力的作用下,所述调整活塞73贴靠在斜盘75处,并且尝试对于所述斜盘75沿着减小所述排量的方向进行调节。
31.反弹簧(gegenfeder)76沿着反方向作用到所述斜盘75上,该反弹簧,不同于根据图2的线路图中所示出的那样,并不直接作用在所述调整活塞73处,而是作用在所述斜盘75
处。所述反弹簧在调整活塞处的作用会使得在所述调整活塞与斜盘之间沿着两个调节方向的形状配合的连接变得必要。
32.用作压力调控器的调控阀78被构造到以点划线的方式示出的泵壳体77的法兰面上,所述调控阀具有一调控活塞79用于所述调控,更准确地说用于限定所述泵压力。所述调控活塞79由能设定的调控弹簧80朝着静止位置的方向来加载——该静止位置在图2中被示出,并且能够从所述静止位置连续地调节出来。该调控活塞连同未进一步表示的壳体形成能成比例地调节的二位三通换向阀。
33.所述调控阀78在装配面(该调控阀以该装配面来置于法兰面上)中具有压力接头p、控制接头a以及储箱接头t。所述压力接头p经由在所述泵壳体77之内的钻孔与通到所述液压泵25的压力接头27的高压通道进行流体连接。所述储箱接头通过在所述泵壳体之内的钻孔与所述泵壳体77的内部相连接,并且通过所述泵壳体的泄漏接头以未进一步示出的方式与储箱相连接。所述控制接头a通过在泵壳体77中的钻孔与调整腔室钻孔相连接,所述调整活塞73在该调整腔室钻孔中以能移动的方式被引导。所述调控阀78能够通过控制接头a使得压力介质从压力接头p出来直接输送给调整腔室74,或者使得压力介质从调整腔室排出至储箱接头t。
34.所述压力调控器78的调控活塞79由泵压力逆着调控弹簧80来加载。
35.在所述压力调控器78的静止位置中,该压力调控器的控制接头a与储箱接头t相连接,从而通过所述反弹簧76使得压力介质能够从调整腔室74被挤出。由此增大所述调节泵的排量。如果所述泵压力如此高:使得其超过调控弹簧80的压力等价值,那么所述压力调控器78的调控活塞79就从其静止位置运动出来,从而能够通过所述压力调控器使得压力流体从液压泵25的压力接头27出来输送给调整腔室74,并且降低液压泵的排量。
36.流体路径并不直接从压力调控器78的控制接头a通到调整腔室74中。而是在所述流体路径中还接入能够通过比例电磁体59来成比例地操纵的调控阀81,该调控阀作为插装筒(einbaupatrone)被插入到调整腔室钻孔中,并且将调整腔室74限定在与所述调整活塞73相对置的一侧上。所述调控阀81(也随意地称为ep调控器)具有一直接与所述液压泵25的高压侧相连接的压力接头、一与所述压力调控器78的控制接头a相连接的惰性的接头、以及一与所述调整腔室74相连接的调整腔室接头。所述调控阀81的调控活塞82由在调控活塞82与调整活塞73之间所夹紧的反馈弹簧83的力朝着静止位置的方向来加载,在该静止位置中所述调整腔室接头与调控阀81的压力接头相连接。所述反馈弹簧的力在此取决于所述调整活塞73的位置,并且因此取决于所述斜盘75的位置。所述比例电磁体59能够使得调控活塞82逆着反馈弹簧83移动到下述位置中,在该位置中所述调整腔室接头与所述惰性的接头相连接,并且进一步通过压力调控器78的控制接头a与压力调控器的与压力接头p或储箱接头t相连接。相对于存在于所述调整腔室74中的压力对于调控活塞82进行压力平衡。存在于所述调整腔室中的压力因此不会将所产生的力施加到所述调控活塞82上。当由所述反馈弹簧83所施加的力与所述比例电磁体59的力一样大时,该调控活塞就占据调控位置。由于由所述反馈弹簧83所施加的力取决于所述斜盘75的位置,因此就相对于流动穿过所述比例电磁体59的电流成比例地调控所述斜盘75的确定的摆动角。通过所述调控阀81因此实现所述液压泵25的电动比例的调节。
37.在电动比例的调节的在图2中所示出的变型方案中,所述调控阀81具有第三位置,
该调控阀在控制信号损失时进入到该第三位置中。所述液压泵在控制信号损失时被设置到最大排量。
38.通过图3的三张图示出所述连续阀40与理论上的特性曲线相比的示例性的特性曲线偏差。最上面的图示出在一时间范围内施加在所述连续阀上的压力,对于所述压力而言预先给定确定的值,即例如50巴的工作点压力。根据中间的图,用于所述连续阀40的控制信号——即流动穿过所述比例电磁体44的电流在一时间范围内斜坡状地提高。在最下方的图中用虚线示出通过所述连续阀40的理论上的体积流量,并且用实线示出通过所述连续阀的实际上的体积流量,正如在电流的斜坡状的提高的期间所产生的体积流量那样。附加地绘出例如10 l/min的工作点体积流量。理论上在预先给定的工作点压力时,在时间点t1在流动通过所述比例电磁体44的额定电流i1时应该达到工作点体积流量。由于受制造所限的偏差使得连续阀40晚些才打开,因此在之后的时间点t2在与所述电流值i1相比更高的电流值i2时才达到所述工作点体积流量。在所述电流值i2与电流值i1之间的差是电流偏移,在液压系统中通过电子控制器57单独地对于各个连续阀40通过根据本发明的校准过程来获取所述电流偏移。
39.在图4中,最上方的图示出下述电流,该电流在初始状态a中并且在校准过程的不同的阶段b、c、d和e的期间流动穿过所述连续阀40的比例电磁体44、所述旁通阀50的比例电磁体52、所述调节装置24的比例电磁体59以及在所述主阀30处的比例电磁体36中的一个比例电磁体。曲线设有与相应地被通电的比例电磁体相同的附图标记。第二张图从上方示出在初始状态a中以及在校准阶段b至e期间的泵体积流量。第三张图从上方示出阀30、40和50在初始状态中以及在不同校准阶段中的通流横截面。曲线设有与相应的阀相同的附图标记。虚线表明所述连续阀40的理论上的通流横截面。并且最后,最下方的图示出在初始状态中以及在校准过程期间的泵压力,其中在当前情况下,在校准过程期间的泵压力等于工作点压力并且得到调控。有利的是,在校准过程期间使得液压泵25的转速保持恒定。接下来以此为出发点。
40.在初始状态a(该初始状态在图1中被示出)中,所述液压系统处于待机运行之中。液压泵25产生待机体积流量,所述待机体积流量从对于比例电磁体59的通电中得出,并且所述待机体积流量通过已打开的旁通阀50流到储箱26中。根据图4的最上方的图,所述旁通阀的比例电磁体52已经被加载以一定的电流。所述连续阀40被关闭,然而根据图4的最上方的图已经有低电流流动通过所述连续阀40的比例电磁体44。所述主阀30位于其中间位置中。对于所述液压泵25而言没有激活压力调控。从所述液压泵25的待机体积流量以及所述旁通阀50的通流横截面得出泵压力。
41.在阶段b中开始所述校准过程。通过对于所述比例电磁体52进行更高强度的通电、并且在另外的阶段期间以保持恒定的方式进行通电,将所述旁通阀50设定到这种更小的通流横截面,使得在所述泵管路28中能够达到有待调控的工作点压力。所述液压泵25借助于压力传感器54和电子控制器57以及其调节装置24被压力调控到预先给定的工作点压力,其中,所述比例电磁体59被加载以与初始阶段a相比提高的电流i1
pumpe
。电流值i1
pumpe
被电子控制器57所存储。所述主阀30的比例电磁体36被完全通电并且在所述校准过程期间保持完全通电,从而使得从所述连续阀40至液压缸15存在畅通的流体连接。
42.在所述校准过程的阶段b中,全部的由所述液压泵25所产生的体积流量经由所述
旁通阀50流出到储箱26。
43.从最小通电出发,在所述校准过程的阶段c中,流动通过所述连续阀40的比例电磁体44的电流缓慢地提高,正如这在图6中通过在所述连续阀40上方的变大的闪电所表示的那样。从图4上方的第三张图得知:在阶段c期间还没有打开所述连续阀40。因此在阶段c中,所述液压泵25的体积流量与在阶段b中相同,正如也从图4上方的第二张图得知的那样。此外,所述泵体积流量经由所述旁通阀50流出到储箱26。
44.当在所述连续阀40的比例电磁体44处达到下述电流值时就开始所述校准过程的阶段d,在该电流值的情况下所述连续阀开始打开。从这个时间点起,体积流量能够从泵管路28经由连续阀40并且经由从阶段b开始起就已经打开的主阀30流动至液压缸15。由于这时压力流体不仅通过旁通阀50而且通过连续阀40从泵管路流走,所以由于所述压力调控而增大液压泵25的排量,以便在所述泵管路中维持所述工作点压力。流动通过比例电磁体44的电流越大,这时在所述连续阀40中的通流横截面就越大,所述液压泵的体积流量就越大,并且流动通过所述液压泵的ep
‑
调控装置24的比例电磁体59的电流就越大,所述电流对于产生所述体积流量而言是必要的。经由所述旁通阀50流出到所述储箱的体积流量不发生变化,因为所述旁通阀的通流横截面和泵压力不发生变化。
45.这时从所述液压泵的转速以及所存储的电流值i1
pumpe
能够计算出来电流值i2
pumpe
有多大,在该电流值i2
pumpe
时所述工作点体积流量流动通过连续阀40。在此特别有利的是,在所述排量与通过所述比例电磁体59的电流之间的关系呈现出线性的关系。那么必要的排量变化就不取决于绝对的排量。由于这时在通过所述连续阀40的工作点体积流量与对此所必要的在所述液压泵25处的电流的变化之间的关系是已知的,所以从在所述校准过程的阶段b和c中未知的或不准确的泵体积流量出发,能够非常准确地确定与流动通过所述连续阀40的工作点体积流量相对应的、液压泵的体积流量变化,并且因此能够非常准确地确定所述工作体积流量。对于获取所述工作点体积流量而言仅仅需要知道所述泵体积流量的变化,反之,不必知道在所述校准过程的阶段b和c中的体积流量的绝对数值。
46.一旦这时在流动通过所述连续阀40的比例磁体44的电流继续提高时在所述泵处达到所述电流值i2
pumpe
,就开始所述校准过程的最后的阶段e。控制器57知道的是,这时所述工作点体积流量流动通过所述连续阀40。此外,所述控制器57知道的是,流动通过所述连续阀40的比例电磁体44的电流在下述时间点有多大,在该时间点所述工作点体积流量流动通过所述连续阀40,并且所述控制器将所述电流存储为电流值i2。在电流值i2与电流值i1——在所述电流值i1时理论上在所给出的工作点压力的情况下所述工作点体积流量应该流动通过所述连续阀40——之间的差是电流偏移。所述电流偏移被存储在所述控制器57中,并且各个连续阀40的受制造所限的偏差由所述理论上的特性曲线通过下述方式来修正,在考虑所述电流偏移的符号的情况下,将在每个有待发送给所述连续阀40的比例电磁体44的操控信号时的电流偏移与理论上的操控信号相加。
47.对于所述方法而言有利的是,负载压力尽可能小,并且明显小于所述工作点压力,以便使得体积流量能够流向液压消耗器。对于在校准过程期间进行压力流体的流入而言,借助于所述主阀能够选择负载更低的缸室。特别有利的是,例如通过从所述运动学的已知的位置进行测量或者估计来获知所述负载压力。然后所调控的泵压力能够以所述负载压力为幅度与在负载压力为零时的值相比进行提高,从而与所述工作点压力相对应的压力差存
在于所述连续阀上。
48.可考虑的是,在所述校准过程期间使得所述旁通阀50保持关闭。然而大部分液压泵都具有用于最小排量的机械止挡。在根据图4的阶段a的初始状态中,从所述液压泵的最小排量和转速得出的待机体积流量能够损失少地流出到储箱,并且在阶段b和c中能够调控到在最大压力之下的压力。
49.对于阀的根据本发明的校准而言,并不一定需要带有ep
‑
调控装置的调节泵。其它的调节装置也是可行的。
50.这样图8就示出呈轴向活塞结构形式的液压泵,对于该液压泵而言,排量以及尤其是排量变化借助于摆动角传感器来确定。
51.在图8中所示出的用来调节调节泵25的斜盘75的调节装置24包括:单重作用的调整活塞86,利用所述调整活塞能够在减小倾斜位置并且因此减小排量的意义上来摆动所述斜盘;以及单重作用的配对活塞87,所述配对活塞能够与弹簧88一起在增大所述倾斜位置并且因此增大所述排量的意义上来摆动所述斜盘,并且所述配对活塞的作用面小于所述调整活塞86的作用面。包围所述配对活塞87的配对腔室89持续地与所述调节泵25的压力接头27相连接,从而使得所述配对活塞被加载以泵压力。
52.液压油到所述调整腔室90(所述调整活塞86嵌入到所述调整腔室中)去的以及从所述调整腔室来的流入以及流出,通过被构造为能成比例地调节的二位三通换向阀的调控阀91来控制,所述调控阀具有:压力接头92,该压力接头与所述调节泵的压力接头27相连接;以及储箱接头93,该储箱接头与所述泵壳体77的内部并且经此与所述储箱26进行流体连接。所述调控阀91最后具有一与所述调整腔室90进行流体连接的调整腔室接头94。在所述调控阀91在压缩弹簧95的作用下占据的静止位置中,在所述调整腔室接头94与储箱接头93之间存在大的通流横截面。通过比例电磁体96,使得所述调控阀91能够根据磁体电流的大小逆着所述压缩弹簧95的力以不同的程度从所述静止位置运动出来。在流动通过所述比例电磁体96的电流的确定的大小的情况下,所述调控阀91的未进一步示出的调控活塞占据下述调控位置,所述调整腔室接头94在该调控位置中以小的负的覆盖度相对于所述压力接头92并且相对于所述储箱接头93很大程度地被阻塞。在所述调控位置中仅仅代替少量的从所述调整腔室流出的泄漏流量。所述斜盘75的倾斜位置以及因此所述调节泵25的排量不发生变化。因此也将然后流动通过所述比例电磁体96的电流称为中性电流。
53.如果流动通过所述比例电磁体96的电流与所述中性电流相比减小,那么所述压缩弹簧95就能够使得所述调控活塞从所述调控位置移动到下述位置中,在该位置中使得所述调整腔室接头94朝所述储箱接头93打开。在此,所述通流横截面的大小取决于所述中性电流与此刻的电流之间的差有多大。这时能够将液压油从所述调整腔室90经由所述调整腔室接头94和所述储箱接头93挤出,从而增大所述斜盘75的倾斜位置。如果流动通过所述比例电磁体96的电流与所述中性电流相比提高,那么所述比例电磁体就能够使得所述调控活塞从调控位置移动到下述位置中,在该位置中所述调整腔室接头94朝所述压力接头92打开。所述通流横截面的大小取决于此刻的电流与中性电流之间的差有多大。这时能够使得液压油从所述调节泵25的压力接头27出来流入所述调整腔室90,从而减小所述斜盘75的倾斜位置。
54.在根据图8的调节泵25中,所述斜盘75的摆动角以及因此所述排量通过用作排量
传感器的摆动角传感器97来检测,所述摆动角传感器将电输出信号发出到所述电子控制器57。所述电子控制器将所述摆动角传感器97的与所述摆动角的实际值相对应的输出信号与额定值相比较,并且根据所述摆动角的额定值与实际值之间的差来操控所述调控阀91。
55.在根据图8的调节泵中,对于所述泵压力的检测而言也设置与所述控制器57相连接的压力传感器54。由此可以进行泵压力的调控。借助于所述摆动角传感器97的信号能够非常准确地检测流动通过所述连续阀40的工作点体积流量,从而利用根据图8的液压泵也能够执行根据本发明的校准方法。
56.附图标记列表15
ꢀꢀꢀꢀꢀꢀ
液压缸16
ꢀꢀꢀꢀꢀꢀ
15的缸壳体17
ꢀꢀꢀꢀꢀꢀ
15的活塞18
ꢀꢀꢀꢀꢀꢀ
15的活塞杆19
ꢀꢀꢀꢀꢀꢀ
15的活塞杆远侧的缸室20
ꢀꢀꢀꢀꢀꢀ
15的活塞杆侧的缸室23
ꢀꢀꢀꢀꢀꢀ
转速传感器24
ꢀꢀꢀꢀꢀꢀ
调节装置25
ꢀꢀꢀꢀꢀꢀ
液压泵26
ꢀꢀꢀꢀꢀꢀ
储箱27
ꢀꢀꢀꢀꢀꢀ
25的压力接头28
ꢀꢀꢀꢀꢀꢀ
泵管路29
ꢀꢀꢀꢀꢀꢀ
阀盘30
ꢀꢀꢀꢀꢀꢀ
主阀31
ꢀꢀꢀꢀꢀꢀ
30的消耗器接头32
ꢀꢀꢀꢀꢀꢀ
30的消耗器接头33
ꢀꢀꢀꢀꢀꢀ
30的泵接头34
ꢀꢀꢀꢀꢀꢀ
30的储箱接头35
ꢀꢀꢀꢀꢀꢀ
回位弹簧36
ꢀꢀꢀꢀꢀꢀ
比例电磁体40
ꢀꢀꢀꢀꢀꢀ
连续阀41
ꢀꢀꢀꢀꢀꢀ
40的工作接头42
ꢀꢀꢀꢀꢀꢀ
40的工作接头43
ꢀꢀꢀꢀꢀꢀ
回位弹簧44
ꢀꢀꢀꢀꢀꢀ
比例电磁体50
ꢀꢀꢀꢀꢀꢀ
旁通阀51
ꢀꢀꢀꢀꢀꢀ
50的回位弹簧52
ꢀꢀꢀꢀꢀꢀ
50的比例电磁体53
ꢀꢀꢀꢀꢀꢀ
电导线54
ꢀꢀꢀꢀꢀꢀ
压力传感器55
ꢀꢀꢀꢀꢀꢀ
电输入设备
56
ꢀꢀꢀꢀꢀꢀ
电导线57
ꢀꢀꢀꢀꢀꢀ
电子控制器58
ꢀꢀꢀꢀꢀꢀ
电导线59
ꢀꢀꢀꢀꢀꢀ
在25处的比例电磁体61
ꢀꢀꢀꢀꢀꢀ
电导线62
ꢀꢀꢀꢀꢀꢀ
电导线63
ꢀꢀꢀꢀꢀꢀ
电导线64
ꢀꢀꢀꢀꢀꢀ
电导线65
ꢀꢀꢀꢀꢀꢀ
电导线73
ꢀꢀꢀꢀꢀꢀ
调整活塞74
ꢀꢀꢀꢀꢀꢀ
调整腔室75
ꢀꢀꢀꢀꢀꢀ
25的斜盘76
ꢀꢀꢀꢀꢀꢀ
反弹簧77
ꢀꢀꢀꢀꢀꢀ
泵壳体78
ꢀꢀꢀꢀꢀꢀ
调控阀79
ꢀꢀꢀꢀꢀꢀ
78的调控活塞80
ꢀꢀꢀꢀꢀꢀ
78的调控弹簧81
ꢀꢀꢀꢀꢀꢀ
调控阀82
ꢀꢀꢀꢀꢀꢀ
81的调控活塞83
ꢀꢀꢀꢀꢀꢀ
反馈弹簧86
ꢀꢀꢀꢀꢀꢀ
调整活塞87
ꢀꢀꢀꢀꢀꢀ
配对活塞88
ꢀꢀꢀꢀꢀꢀ
弹簧89
ꢀꢀꢀꢀꢀꢀ
配对腔室90
ꢀꢀꢀꢀꢀꢀ
调整腔室91
ꢀꢀꢀꢀꢀꢀ
调控阀92
ꢀꢀꢀꢀꢀꢀ
91的压力接头93
ꢀꢀꢀꢀꢀꢀ
91的储箱接头94
ꢀꢀꢀꢀꢀꢀ
91的调整腔室接头95
ꢀꢀꢀꢀꢀꢀ
在91处的压缩弹簧96
ꢀꢀꢀꢀꢀꢀ
91的比例电磁体97
ꢀꢀꢀꢀꢀꢀ
摆动角传感器。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。