车载装卸设备、移动ct机用车载装卸设备和移动ct卒中救护车
技术领域
1.本发明涉及装卸设备和救护车,尤其涉及车载装卸设备、移动ct机用车载装卸设备和移动ct卒中救护车。
背景技术:
2.脑卒中是我国成年人群致死、致残的首位病因,其具有发病率高、死亡率高和致残率高的特点。临床研究显示,脑卒中急救的关键是首先采用ct 机(计算机x线断层摄影机)确定卒中类型,因此尽快地将ct机带至患者身边将为患者的抢救赢得黄金时间。现有技术中已经存在移动ct机,其带有脚轮以便于推动,可由救护车携带以在入院前完成对患者的诊断。但是在实际使用过程中,移动ct机除了放置在救护车内之外,还会在需要时被推入院内科室使用,因此在救护车上装卸ct机构成了一个问题。移动ct机体积较大且重量一般大于250公斤,人工搬运费时费力且无法保证仪器搬运过程中的安全性。
技术实现要素:
3.为了克服上述问题,本发明提供了车载装卸设备、包括该车载装卸设备的移动ct机用车载装卸设备以及包括该移动ct机用车载装卸设备的移动 ct卒中救护车。
4.本发明提供了一种车载装卸设备,其包括承载平台、支撑架、伸缩装置以及升降装置。承载平台用于承载待装卸物体且包括相对的第一侧面和第二侧面。支撑架包括彼此平行延伸的第一支撑件和第二支撑件,其中所述第一支撑件和所述第二支撑件限定出第一平面。伸缩装置包括彼此平行地安装在车辆底板上的第一导轨和第二导轨,所述第一支撑件和所述第二支撑件分别可相对滑动地连接至所述第一导轨和所述第二导轨,所述伸缩装置还包括第一驱动机构,所述第一驱动机构被设计用于驱动所述第一支撑件和所述第二支撑件分别沿所述第一导轨和所述第二导轨同步滑动。升降装置包括第一驱动长臂和第二驱动长臂,所述第一驱动长臂的一端可相对转动地连接至所述第一侧面且另一端可相对转动地连接至所述第一支撑件,所述第二驱动长臂的一端可相对转动地连接至所述第二侧面且另一端可相对转动地连接至所述第二支撑件,其中所述第一驱动长臂和所述第一支撑件的连接位置与所述第二支撑件和所述第二支撑件的连接位置之间的连线限定出垂直于所述第一支撑件延伸的第一轴线,所述升降装置还包括第二驱动机构和平衡机构,所述第二驱动机构被设计用于驱动所述第一驱动长臂和所述第二驱动长臂同步围绕所述第一轴线转动以使所述承载平台关于所述支撑架至少能转动至第一位置和第二位置,其中在所述第一位置所述承载平台抵靠于地面,在所述第二位置所述承载平台位于所述第一平面内,所述平衡机构被设计为引导所述承载平台始终平行于所述第一平面地相对于所述支撑架转动。具有上述结构的车载装卸设备能够平稳且安全地将待装卸物体装入车辆或者从车上卸下,其结构紧凑且占用空间小。
5.优选地,所述升降装置还包括第一短臂和第二短臂,所述第一短臂和所述第二短
臂的一端分别连接至所述第一驱动长臂和所述第二驱动长臂的另一端以分别与所述第一驱动长臂和所述第二驱动长臂组成l形的组件,所述第二驱动机构包括第一液压缸和第二液压缸,所述第一液压缸和所述第二液压缸的一端分别可相对转动地连接至所述第一短臂和所述第二短臂的另一端,所述第一液压缸和所述第二液压缸的另一端分别可相对转动地连接所述第一支撑件和所述第二支撑件。
6.优选地,所述平衡机构包括第一平衡臂和第二平衡臂以及分别开设于所述第一侧面和所述第二侧面上以及所述第一支撑件和所述第二支撑件的朝向彼此的侧面上的容置滑槽,所述第一平衡臂和所述第二平衡臂分别对应地与所述第一支撑件和所述第二支撑件彼此平分且可相对转动地连接,所述第一平衡臂的两端分别可相对滑动地容置在所述第一侧面和所述第一支撑件的容置滑槽211中,所述第二平衡臂的两端分别可相对滑动地容置在所述第二侧面和所述第二支撑件的容置滑槽中。具有上述特点的第一驱动长臂和第一平衡臂保证了承载平台的第一侧面和第二侧面将始终分别平行于第一支撑件和第二支撑件,由此承载平台将始终平行于第一平面地运动。
7.优选地,所述第一平衡臂和第二平衡臂均包括长度相等的第一活动支臂和第二活动支臂,所述第一平衡臂的所述第一活动支臂和所述第二活动支臂分别从所述第一驱动长臂的対置两侧连接至所述第一驱动长臂,所述第二平衡臂的所述第一活动支臂和所述第二活动支臂分别从所述第二驱动长臂対置两侧连接至所述第二驱动长臂。
8.优选地,所述第一驱动长臂的和所述第二驱动长臂的另一端借助于第一转轴连接至所述支撑架,所述第一液压缸和所述第二液压缸的另一端借助于第二转轴连接至所述支撑架,所述第一转轴和所述第二转轴均布置在所述第一支撑件和所述第二支撑件之间且平行于所述第一轴线延伸,其中所述第一转轴的轴线与所述第一轴线重合。
9.优选地,所述车载装卸设备还包括从所述第一导轨和所述第二导轨的竖向上方固定安装至车辆底板或固定安装至所述第一导轨和所述第二导轨的固定平台,所述固定平台与所述第一导轨和所述第二导轨围出一个容置空间,所述容置空间的尺寸被设计为足以容纳所述承载平台、所述支撑架、所述第一驱动机构以及所述升降装置。在具有上述结构的车载装卸设备中整个升降装置都能够在缩入车内时容置在固定平台的下方,因此结构紧凑,占用空间小,为车内操作留出了更大的空间,同时固定平台也对升降装置、承载平台以及支撑架提供了保护。
10.所述第二驱动机构优选被设计为还能够使所述承载平台相对于所述支撑架转动至第三位置,在所述第三位置处所述承载平台平齐于或高于所述固定平台。在第三位置处,物体可从承载平台被轻松移至或者推至固定平台上。
11.最好在所述承载平台的靠近所述第二转轴的侧面设置可翻转挡板,该可翻转挡板借助第三转轴与所述承载平台可相对转动地联接,在所述第三转轴上套设至少一个扭簧,所述扭簧的两个支腿分别压靠所述承载平台和所述可翻转挡板,所述可翻转挡板还借助限位拉绳连接至所述承载平台。具有上述特点的可翻转挡板在展开状态下构成了承载平台与固定平台之间的桥梁。
12.优选地,所述第一驱动机构被构造为包括链条盖板、传动链条、液压马达以及套设在液压马达的驱动轴上以与所述传动链条啮合的链轮,其中所述液压马达固定连接至所述支撑架,所述链条盖板平行于所述第一导轨延伸且从所述液压马达的竖向上方固定连接至
所述第一导轨和/或所述第二导轨,所述传动链条固定连接至所述链条盖板的朝向车辆底板的侧面。
13.本发明还提供一种移动ct机用车载装卸设备,所述移动ct机具有脚轮,包括上述车载装卸设备,其中在所述固定平台和所述承载平台上分别设置限位件,所述ct机的脚轮能够借助于所述限位件可拆卸地且不可相对移动地分别连接至所述固定平台和所述承载平台。上述移动ct机用车载装卸设备能够轻松地相对于车辆装卸移动ct机。
14.本发明还提供一种移动ct卒中救护车,其特征是,包括驾驶室、医疗舱和上述移动ct机用车载装卸设备,其中所述医疗舱设有左侧门,所述第一导轨和所述第二导轨垂直于所述左侧门地设置在车辆底板的边缘位置以使所述第一支撑件和所述第二支撑件相对于所述救护车通过所述左侧门伸出和缩回。上述移动ct卒中救护车能够使得移动ct机固定其上以运载该移动ct机,并且还能通过移动ct机用车载装卸设备轻松地将移动ct机装卸车辆,以使得移动ct机在救护车上和医院科室之间按需转移使用。
附图说明
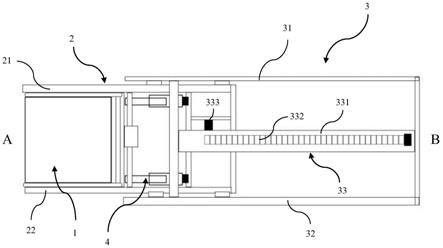
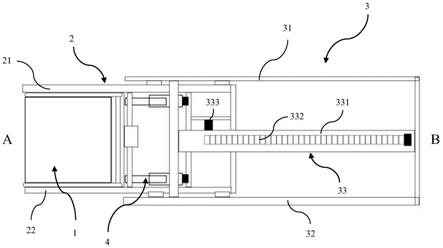
15.图1是根据本发明的车载装卸设备的俯视示意图,其中移除了固定平台。
16.图2和图3是升降装置的两种使用状态的示意图。
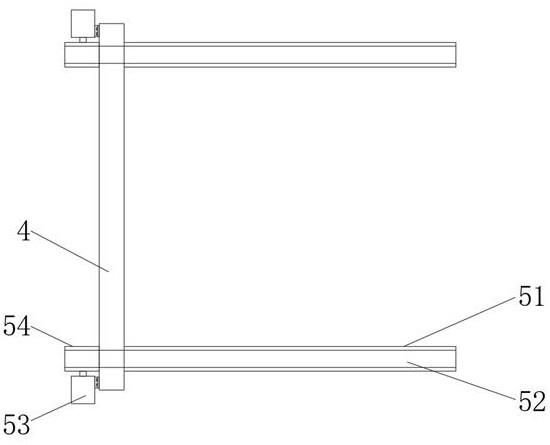
17.图4是第一驱动长臂与第一平衡臂的连接示意图。
18.图5是可翻转挡板的示意图。
19.图6-图11为根据本发明的车载装卸设备的使用过程示意图。
20.附图标记列表
21.1.承载平台;11.第一侧面;12.第二侧面;13.第一侧面的容置滑槽;14.第二侧面的容置滑槽;2.支撑架;21.第一支撑件;211.第一支撑件的容置滑槽;22.第二支撑件;3.伸缩装置;31.第一导轨;32.第二导轨;33.第一驱动机构;331.链条盖板;332.传动链条;333.液压马达;4.升降装置;41. 第一驱动长臂;42.第一短臂;43.第二驱动长臂;44.第二短臂;45.第一液压缸;46.第二液压缸;47.第一平衡臂的第一活动支臂;48.第一平衡臂的第二活动支臂;49.第二平衡臂的第一活动支臂;410.第二平衡臂的第二活动支臂;411.第一转轴;412.第二转轴;413.第三转轴;5.固定平台;6.可翻转挡板;7.限位拉绳;8.限位件。
具体实施方式
22.现参考附图,详细说明本发明所公开的结构的示意性方案。尽管提供附图是为了呈现本发明 的实施方式,但附图不必按具体实施方案的尺寸绘制,并且某些特征可被放大、移除或局剖以更好地示出和解释本发明 的公开内容。
23.在下文中用于描述附图的某些方向性术语将被理解为具有其正常含义。尤其是,方向术语“侧”或“侧向”指代在救护舱内由后向前(即朝向驾驶室方向) 观察时救护舱的左右手两侧,其中左手边为左侧。除另有指明,本说明书所述的其它方向性术语基本指代本领域技术人员所理解的常规方向。
24.图1示出根据本发明的车载装卸设备的俯视示意图,其中移除了固定平台5以更好地示出将布置在固定平台5下方的结构。该车载装卸设备主要包括承载平台1、支撑架2、伸缩装置3以及升降装置4,其中,支撑架2在伸缩装置3的作用下能够伸出和缩回车辆。承载平
台1用于承载待装卸的物体,其连接至支撑架2,从而其也能够随着支撑架2的移动而伸出和缩回车辆。当承载平台1伸出车辆时,其能够在升降装置4的驱动下关于支撑架2至少转动至两个位置,即第一位置和第二位置。在第一位置处(例如图7所示的位置),承载平台抵靠于地面,此处ct机可被推到承载平台1上,在第二位置处(例如图6所示的位置),承载平台1将与支撑架2位于同一个平面中,此处待装卸的物体可随着支撑架2伸出和缩回车辆而进入或离开车辆。下文中待装卸的物体以移动ct机为例进行描述。
25.参见图1和图2,承载平台1包括相对的第一侧面11和第二侧面12。支撑架2包括彼此平行地延伸的第一支撑件21和第二支撑件22,其中第一支撑件21和第二支撑件22能够唯一限定出一个平面,在本文中其也被称作第一平面。
26.伸缩装置3包括彼此平行地安装在车辆底板上的第一导轨31和第二导轨32。第一支撑件21和第二支撑件22分别可相对滑动地连接至第一导轨 31和第二导轨32以在部段上滑入和滑出第一导轨31和第二导轨32。第一支撑件21和第二支撑件22可借助于滑动件,例如滑轮或者滑块,实现沿着第一导轨31和第二导轨32的滑动运动。该滑动件还可例如采用现有技术中的二级滑轨或者三级滑轨。第一导轨31和第二导轨32一般布置在车辆底板的边缘位置处,由此第一支撑件21和第二支撑件22在部段上滑入和滑出第一导轨31和第二导轨32也可被看作第一和第二支撑件22在部段上伸出和缩回车辆。
27.伸缩装置3还包括第一驱动机构33,其用于驱动第一支撑件21和第二支撑件22分别沿着第一导轨31和第二导轨32执行滑动运动。在一个优选的例子中,第一驱动机构33采用链条式横向移动机构。具体地该链条式横向移动机构可包括链条盖板331、传动链条332、液压马达333和链轮(未示出)。液压马达333被固定安装在支撑架2上,例如其外壳借助于连接杆件连接至第一支撑件21和第二支撑件22中的一个或者两个。链条盖板331平行于第一导轨31延伸且从所述液压马达333的竖向上方固定连接至第一导轨31和第二导轨32中的一个或者两个,例如在图1中链条盖板331的两端分别借助于两个连接杆件连接至第一导轨31和第二导轨32。链条盖板331 也将被容置在下文所述的容置空间之内。传动链条332固定连接至所述链条盖板331的朝向车辆底板的侧面,链轮套设在液压马达333的驱动轴上以从链条盖板331的朝向车辆底板的侧面侧与所述传动链条332啮合。当液压马达333启动时,例如当液压马达333的驱动轴朝向顺时针转动时,链轮将相对于链条从b朝向a方向运动,也就是驱动整个支撑架2从b向a运动,使支撑架2部分伸出车辆;当液压马达333的驱动轴朝向逆时针方向转动时,链轮将相对于链条从a朝向b方向运动,也就是驱动整个支撑架2从a向 b运动,从而使支撑架2缩回车辆。其中a代表车辆外部的一个位置,b代表车辆内部的一个位置。
28.虽然未示出,但本领域技术人员应理解的是,第一驱动机构33还可采用其它现有技术中已知的结构,例如齿轮齿条运动副或蜗轮蜗杆传动结构,以实现支撑架2沿着第一导轨31和第二导轨32的滑动,在此不再赘述。
29.升降装置4如图2和图3所示地包括第一驱动长臂41和第二驱动长臂 43、平衡机构以及第二驱动机构。第一驱动长臂41和第二驱动长臂43用于将承载平台1的第一侧面11和第二侧面12分别连接至第一支撑件21和第二支撑件22,从而承载平台1将随着第一支撑件21和第二支撑件22滑出第一导轨31和第二导轨32而伸到车外。
30.具体地,第一驱动长臂41的一端可相对转动地连接至承载平台1的第一侧面11,另一端可相对转动地连接至第一支撑件21。类似地,第二驱动长臂43的一端可相对转动地连
接至承载平台1的第二侧面12,另一端可相对转动地连接至第二支撑件22。本文中,将第一驱动长臂41和第一支撑件 21的连接位置与第二驱动长臂43和第二支撑件22的连接位置之间的连线称为第一轴线。第一轴线垂直于第一支撑件延伸。优选地,第一驱动长臂41 和第二驱动长臂43的另一端借助于一根共用的第一转轴411连接至分别连接至第一支撑件21和第二支撑件22,其中第一转轴411被布置在第一支撑件21和第二支撑件22之间,其轴线将与上述第一轴线重合。
31.第二驱动机构用于驱动第一驱动长臂41和第二驱动长臂43同步围绕第一轴线转动,由此第一驱动长臂41和第二驱动长臂43也可带动承载平台1 围绕第一轴线转动。在理想情况下,第二驱动机构能够驱动第一驱动长臂41 和第二驱动长臂43围绕第一轴线转动360度。为了完成装卸功能,本文中要求第二驱动机构能够驱动第一和第二驱动长臂带动承载平台1至少要转动至上述第一位置和第二位置。
32.为了防止ct机在承载平台1的转动过程中倾斜掉落,无论第一驱动长臂41和第二驱动长臂43带动承载平台1关于第一支撑件21和第二支撑件 22转动至任何位置,承载平台1均应保持平行于第一平面,由此要求承载平台1的对应于第一侧面11和第二侧面12的第一侧边和第二侧边应分别对应地与第一支撑件21和第二支撑件22保持平行。对此,可将第一侧边和第二侧边看作分别位于第一侧面和第二侧面内的与第一侧面和第二侧面的长度方向平行延伸的两条线。
33.本文借助平衡机构来实现引导承载平台1始终平行于第一平面地关于支撑架2转动。在一个优选例子中,该平衡机构包括第一平衡臂和第二平衡臂,第一平衡臂与第一驱动长臂41彼此平分地交叉布置且能够例如借助于轴销关于彼此转动,第二平衡臂与第二驱动长臂43彼此平分地交叉布置且能够借助于轴销关于彼此转动。
34.第一平衡臂和第二平衡臂分别随着第一驱动长臂41和第二驱动长臂43 相对于第一支撑件21和第二支撑件22转动而关于承载平台1和第一支撑件 21和第二支撑件22滑动。具体地,在承载平台1的第一侧面11和第二侧面 12上以及第一支撑件21和第二支撑件22的朝向彼此的侧面上分别开设容置滑槽。第一平衡臂的一个端部可相对滑动地容置在第一侧面11的容置滑槽 13中,另一端可相对滑动地容置在第一支撑件21的对应容置滑槽211内。类似地,第二平衡臂的一个端部可相对滑动地容置在第二侧面12的容置滑槽14中,另一端可相对滑动地容置在第二支撑件22的对应容置滑槽内。第一平衡臂和第二平衡臂的端部可例如借助于滑块容置在对应的容置滑槽内。
35.以第一平衡臂和第一驱动长臂41为例描述。根据平行四边形的其中一个判定原理即对角线互相平分的四边形为平行四边形可知,当将第一平衡臂和第一驱动长臂41看作一个平行四边形的两条对角线时,第一侧边与第一支撑件21可被看作该平行四边形的一组对边,二者将一直保持平行。同理,第二侧边与第二支撑件22也可被看作平行四边形的一组对边并且保持平行,由此第一侧边和第二侧边所界定出的平面(也就是承载平台1所在的平面)也将与驱动长臂和平衡臂之间的夹角变化无关地始终与第一平面保持平行。
36.更优选地,如图2至图4所示,第一平衡臂和第二平衡臂中的每一个均包括等长的第一活动支臂和第二活动支臂。以第一平衡臂为例进行说明,第一平衡臂的第一活动支臂47的一端借助于滑块在第一支撑件21的容置滑槽 211内滑动,第一平衡臂的第二活动支臂48的一端借助于滑块在第一侧面的容置滑槽13内滑动。第一活动支臂47的另一端和第二活
动支臂48的另一端分别从第一驱动长臂41的两侧借助于一个共用轴销连接至第一驱动长臂 41,该共用轴销尤其被定位在驱动长臂的在长度方向上的中间位置,从图4 中可见,h1=h2,h3=h4,其中h3和h4分别为第一活动支臂47和第二活动支臂48的长度,h1和h2为第一驱动长臂41被第一平衡臂分割的两个部段的长度。类似地,第二平衡臂的第一活动支臂49和第二活动支臂410也分别从第二驱动长臂43的対置两侧连接至第二驱动长臂43。
37.另外,虽然未示出,平衡机构还可采用现有技术中的其它结构。例如在第一驱动长臂41和第一侧面11连接的位置处设置附加电机以及传感器,该电机的电机轴插入承载平台1中以带动承载平台1转动,当传感器感测到承载平台1关于第一平面有所倾斜时电机运行,以使承载平台1相对于第一驱动长臂41和第二驱动长臂发生转动。另外,第一平衡臂还可与第一驱动长臂41组成四连杆机构,四连杆机构的运行原理为现有技术中已知,在此不再赘述。
38.第二驱动机构可采用两个液压缸,即第一液压缸45和第二液压缸46。两个液压缸将分别主要作用于第一驱动长臂41和第二驱动长臂43的与第一支撑件21和第二支撑件22连接的另一端。为了实现第一驱动长臂41和第二驱动长臂43关于第一支撑件21和第二支撑件22转动,升降装置4还包括第一短臂42和第二短臂44。第一短臂42的一端连接至第一驱动长臂41 的另一端以与第一驱动长臂41构成l形。类似地,第二短臂44的一端连接至第二驱动长臂43的另一端以与第二驱动长臂43构成l形。本文中的“l 形”涵盖相应的长臂和短臂未布置在一条线上但不一定相互成90
°
的布置形式。优选地,第一短臂42和第一驱动长臂41呈一体件构成,第二短臂44 和第二驱动长臂43呈一体件构成。
39.第一液压缸45的一端(在本文中为液压缸的活塞伸缩的一端)可相对转动地连接至第一短臂42的另一端,第一液压缸45的另一端可相对转动地连接至第一支撑件21。第二液压缸46的一端(在本文中为液压缸的活塞伸缩的一端)可相对转动地连接至第二短臂44的另一端,第二液压缸46的另一端可相对转动地连接至第二支撑件22。第一液压缸45和第二液压缸46的另一端最好借助一根共用的第二转轴412连接至支撑架2。其中第二转轴412布置在第一支撑件21和第二支撑件22之间并且也平行于第一轴线延伸。
40.当希望承载平台1旋转下降时,例如从图2位置下降至图3位置,开启液压缸的泄压功能,在承载平台1重力的作用下第一和第二液压杆的活塞慢慢向外伸出(此时液压缸起阻尼作用),承载平台1例如在图2中将绕第一轴线沿着逆时针方向转动。当希望承载平台1旋转上升时,例如从图3位置上升至图2位置,采用液压泵为第一和第二液压缸注入高压油以推动液压缸的活塞缩回,此时承载平台1将绕第一轴线顺时针方向转动。
41.本文中,第一和第二液压缸优选采用电力驱动,但是其还可配设有一个手动备用泵和电磁阀手动开关,在电控系统出现故障的情况下,可通过二者控制液压缸的运行。
42.当然,第二驱动机构也不仅限于采用液压缸,一种替代方式为采用分别布置在两个驱动长臂与第一支撑件21和第二支撑件22的连接位置处两个电机。电机壳体不可相对转动地容置在第一支撑件21和第二支撑件22内,电机的电机轴伸出第一支撑件21和第二支撑件22,两个驱动长臂分别不可相对转动地联接至电机的电机轴,两个电机同步运行。还可能仅采用一个电机或者液压缸驱动第二转轴旋转。第一驱动长臂41和第二驱动长臂43还可分别不可相对转动地连接至第一转轴411,第二驱动机构直接驱动第一转轴411 关于支撑架2转动。
43.当承载平台1位于第二位置时,其可带动在第一位置处放置其上的ct 机进入车内,此时即完成对ct机的装车任务。但是参见图1,当承载平台1 缩回车内,也就是指完全滑入第一导轨31和第二导轨32之间后,两个导轨以及第一支撑件21和第二支撑件22可能干扰医护人员操作仪器,并且液压缸和液压马达等暴露于外部,非常易于遭受人为损坏。为了解决上述问题,本发明的车载装卸设备还包括一个固定平台5,见图6。
44.固定平台5在本文中从第一导轨31和第二导轨32的竖向上方安装至车辆的底板上,或者也可直接安装至两个导轨中的一个或者两个上,由此固定平台5将与第一导轨31和第二导轨32共同围出一个容置空间。ct机将被推动至固定平台5之上,承载平台1、支撑架2、第一驱动机构33以及升降装置4将被容置在容置空间之中。现有技术中存在采用二级升降机构使得承载平台1在伸出车外后竖向上下滑动的结构,但是此种结构的缺点在于其二级升降机构始终垂直于车辆底板地延伸并且在缩回入车辆后将接近位于车辆的中心位置,其占用空间较大且会干扰工作人员的通行,尤其对于救护车这种紧凑车型而言并不适用。本文中的升降装置4以及承载平台1、支撑架 2、第一驱动机构33等都可被隐藏在容置空间中,在没有仪器需要装入车辆时,固定平台5之上也可放置其它物品,增大了车辆内部的使用空间并且对承载平台1、支撑架2、第一驱动机构33以及升降装置4等起到了保护作用。
45.由上可知,固定平台5的高度应高于第二位置,故第二驱动机构还应驱动第一驱动长臂和第二驱动长臂使得承载平台1转动至高于或者平齐于固定平台5的第三位置,由此才能将承载平台1上的物体推至固定平台5上。
46.当承载平台1处于第三位置例如如图9所示的位置时,承载平台1与固定平台5之间不可避免地会存在一定的间隙。若此间隙远小于移动ct机的脚轮的直径,那么此间隙不会影响ct机从承载平台1滚动至固定平台5,可忽略不计。但是若此间隙相对于移动ct机的脚轮的直径不可忽略不计,那么需要在该间隙处设置一个过渡板。
47.本文中在承载平台1的朝向第二转轴412的侧边上设置一块可翻转挡板 6来用作过渡板,如图5所示。该可翻转挡板6借助于第三转轴413与承载平台1咬合式地联接。在该第三转轴413上套设设置至少一个扭簧,优选间隔地设置多个扭簧,扭簧的二个支腿将分别压靠于承载平台1和该可翻转挡板6以赋予可翻转挡板6朝向固定平台5方向旋转的扭矩。另外,可设有一根限位拉绳7,限位拉绳7的一端连接至承载平台1,另一端连接至该可翻转挡板6,当手动或者自动地拉紧限位拉绳7时可调节可翻转挡板6与承载平台1之间的夹角。另外优选在固定平台5的在第三位置处将朝向可翻转挡板6的侧面设置限位滚轮,可翻转挡板6在行进经过固定平台5时将抵靠于限位滚轮,以将可翻转挡板收折入容置空间。
48.当需要使用可翻转挡板6时,限位拉绳7不施加力,可翻转挡板6在扭簧的作用下朝向固定挡板方向转动(也可表述为可翻转挡板展开),以搭接在固定平台5上。当无需使用可翻转挡板6时,也就是可翻转挡板6的展开会阻碍承载平台1的运动时,人工或自动地拉紧限位拉绳7,使得可翻转挡板 6朝向承载平台1转动以关于承载平台1立起来。
49.同样优选在承载平台1的在伸出车辆时远离车辆的侧边设置一个翻板,该翻板可允许ct机平稳地从地面被推动到承载平台1上。
50.虽然上文中待装卸物体均以移动ct机为例进行描述,但本文中的车载装卸设备并不限于仅装卸ct机,其它尺寸和重量符合承载平台1和固定平台5的承载能力的物体均可采用本文的车载装卸设备实现装卸。当待装卸的目标物体不具有脚轮或球轮等辅助行进结构
时,自然也可省去上述限位件8。
51.另外,本文还提供一种用于移动ct机的车载装卸装置,其除了包括上述的车载装卸装置外还包括限位件。具体说,当移动ct机被放置在承载平台1或者固定平台5上时其脚轮在轻微振动下即会相对于承载平台1或固定平台5产生滚动,为了防止ct机滚出承载平台1和固定平台5,优选在固定平台5和承载平台1上分别设置限位件8,以将ct机的脚轮可拆卸地并且不可相对移动地固定至承载平台1或固定平台5,从而防止ct机相对于承载平台1或固定平台5移位。该限位件8可例如选用固定门栓或者塑料卡扣等,可为ct机的每一个脚轮均对应设置一个固定门栓。
52.另外,本文还提供一种救护车、尤其是移动ct卒中救护车,其上固定安装有上述用于移动ct机的车载装卸设备。具体地,该救护车包括驾驶室和医疗舱,医疗舱除了现有救护车所设有的后门和右侧门之外,还另外设有供ct机或其它医疗设备装卸的左侧门。其中第一导轨31和所述第二导轨 32垂直于所述左侧门地设置在车辆底板,并且布置在车辆底板的边缘位置处,从而第一支撑件21和所述第二支撑件22将通过所述左侧门伸出和缩回所述救护车。
53.下面将结合图6-图10简述采用根据本发明的车载装卸设备将一台ct 机装入救护车的过程。第一步,打开救护车的左侧门,启动液压马达333,使承载平台1从容置空间中完全伸出车外,如图6所示。接下来如图7所示开启第一和第二液压缸的泄压功能,使承载平台1旋转下降至第一位置,打开承载平台1上的固定门栓的栓轴,将ct机推至承载平台1上,使ct机的四个脚轮分别对应地进入四个固定门栓,再固定好栓轴。下一步,为第一和第二液压缸加压,使得活塞缩回,带动承载平台1顺时针旋转上升直至第二位置再进一步上升至第三位置,如图8和9所示,在第三位置处可翻转挡板6搭接至固定平台5上。接下来松开固定门栓的轴销,如图10所示将ct 机推到固定平台5上,再采用固定平台5上的固定门栓的轴销将ct机固定。下一步,再次第一和第二开启液压缸的泄压功能,使承载平台1逆时针旋转下降至第二位置,即回到图6所示的状态。最后再次开启液压马达333,使得支撑架2和承载平台1滑入容置空间内,如图11所示。同理,将ct机从救护车上卸下的过程与上述装卸过程相反。
54.优选为该车辆装卸设备配置操纵手柄,其内设置控制器以控制第一驱动机构33和第二驱动机构的运行。优选在支撑架2上设置位置传感器,其能够与操作手柄内的控制器通信以控制第一驱动机构33的液压马达333运行。还可为车辆装卸设备配置行程控制组件,当承载平台1转动至设定高度时,该行程控制组件向控制器发送信号以停止第二驱动机构的液压缸的运行,使承载平台1锁定在当前高度。
55.另外优选为该车辆装卸设备配置声光警报系统,以在设备运行过程中提醒作业人员和周围行人。
56.根据本发明的车载装卸设备具有稳定升降、载重量大和使用方便等优点,其抽拉式结构占用空间小并且结构紧凑,适用于多种车型,尤其适用于例如为救护车的小型车辆。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。