1.本技术涉及汽车技术领域,具体涉及支架、支架总成、车顶装置以及车辆。
背景技术:
2.随着汽车领域的不断发展,尤其是高级驾驶辅助系统(advanced driving assistance system,adas)的发展,车辆上配置的传感器(例如,摄像头、激光雷达、毫米波雷达)等配件大大增加。这些不断增加的传感器极大地加重了整车制造生产线的装配难度,提高了对结构设计的空间需求。
3.此外,增加摄像头、雷达等配件时,还需要综合考虑其散热需求、线束布置需求以及传感器在采集数据时的视场角需求。不合适的传感器布置可能导致传感器视场角被阻挡,从而难以采集期望的传感器数据。
4.以上公开于本技术背景部分的信息仅仅旨在增加对本技术的总体背景的理解,而不应当被视为承认或以任何形式暗示该信息构成已为本领域一般技术人员所公知的现有技术。
技术实现要素:
5.为了解决或至少缓解以上问题中的一个或多个,提供了以下技术方案。
6.根据本技术的一方面,提供一种用于车辆的支架。所述支架包括:第一架体,其安装至所述车辆的顶部;以及连接体,其包括第一连接部,其布置在所述第一架体左侧并且安装有第一图像传感器,以及第二连接部,其布置在所述第一架体右侧并且安装有第二图像传感器。其中,所述第一连接部和所述第二连接部布置在所述车辆的a柱上方。
7.根据本技术一实施例的支架中,所述第一连接部和所述第二连接部沿所述车辆的纵向轴对称地布置。
8.根据本技术一实施例的支架中,所述第一架体沿所述车辆的纵向轴中心对称。
9.根据本技术一实施例的支架中,所述连接体还括第三连接部,其布置在所述第一架体上并且安装有激光雷达传感器。
10.根据本技术一实施例的支架中,所述第三连接部布置在所述车辆的纵向轴上。
11.根据本技术一实施例的支架中,所述第一架体经由螺栓和/或卡扣安装至所述车辆。
12.根据本技术的另一方面,提供一种用于车辆的支架总成。所述支架总成包括:第一架体,其安装至所述车辆的顶部;第二架体,其安装至所述车辆的顶部;以及连接体。所述连接体包括:第一连接部、第二连接部和第四连接部。所述第一连接部布置在所述第一架体左侧并且安装有第一图像传感器。所述第二连接部布置在所述第一架体右侧并且安装有第二图像传感器。所述第四连接部布置在所述第二架体上并且安装有第三图像传感器。其中,所述第一连接部和所述第二连接部布置在所述车辆的a柱上方。其中,所述第一架体与所述第二架体沿所述车辆的纵向轴前后布置。
13.根据本技术一实施例的支架总成中,所述连接体还包括第三连接部,其布置在所述第一架体上并且安装有激光雷达传感器。
14.根据本技术一实施例的支架总成中,所述连接体还包括第五连接部,其布置在所述第二架体上并且安装有制动灯。
15.根据本技术一实施例的支架总成中,所述第一连接部和所述第二连接部沿所述车辆的所述纵向轴对称地布置。
16.根据本技术一实施例的支架总成中,所述第一架体和所述第二架体沿所述车辆的所述纵向轴中心对称。
17.根据本技术一实施例的支架总成中,所述第三连接部、所述第四连接部和/或所述第五连接部布置在所述车辆的所述纵向轴上。
18.根据本技术一实施例的支架总成中,所述第一架体和所述第二架体经由螺栓和/或卡扣安装至所述车辆。
19.根据本技术一实施例的支架总成中,所述第五连接部包括螺接式连接部、粘接式连接部和/或塔接式连接部。
20.根据本技术的又一方面,提供一种车顶装置。所述车顶装置包括:第一架体,其安装至所述车辆的顶部;连接体,第一连接部,其布置在所述第一架体左侧,以及第二连接部,其布置在所述第一架体右侧,其中,所述第一连接部和所述第二连接布置在所述车辆的a柱上方;第一图像传感器,其安装至所述第一连接部;以及第二图像传感器,其安装至所述第二连接部。
21.根据本技术一实施例的车顶装置中,所述连接体还包括第三连接部,所述第三连接部布置在所述第一架体上。所述车顶装置还包括激光雷达,所述激光雷达安装至所述第三连接部。
22.根据本技术一实施例的车顶装置中,所述车顶装置还包括第二架体,所述第二架体安装至所述车辆的顶部,并且所述第一架体与所述第二架体沿所述车辆的纵向轴前后布置。所述连接部还包括第四连接部,所述第四连接部布置在所述第二架体上。所述车顶装置还包括第三图像传感器,所述第三图像传感器安装至所述第四连接部。
23.根据本技术一实施例的车顶装置中,所述连接体还包括第五连接部,所述第五连接部布置在所述第二架体上。所述车顶装置还包括制动灯,所述制动灯安装至所述第五连接部。
24.根据本技术的再一方面,提供一种车辆。所述车辆包括上述车顶装置。其中,所述第一图像传感器和所述第二图像传感器是侧前视图像传感器。
25.根据本技术一实施例的车辆中,所述第一图像传感器和所述第二图像传感器的视场角沿车辆前向有重叠区域。
26.根据本技术一实施例的车辆中,所述第三图像传感器是后视图像传感器。
27.根据本技术一实施例的车辆,还包括分别布置在所述车辆的翼子板上的两个侧后视图像传感器。
28.根据本技术一实施例的车辆,还包括布置在所述车辆的前窗玻璃后的前视图像传感器。
29.根据本技术一实施例的车辆中,所述前视图像传感器的数量为二,其中一个前视
图像传感器是广角摄像头,另一个前视图像传感器是窄角摄像头。
30.根据本技术一实施例的车辆,还包括分别布置在所述车辆的两个后视镜上的两个环视图像传感器,以及分别布置在所述车辆的前侧和后侧上的另外两个环视图像传感器。
31.根据本技术一实施例的车辆,还包括布置在所述车辆的转向柱上的车内图像传感器。
32.根据本技术一实施例的车辆,还包括布置在所述车辆的前挡板上的毫米波雷达。
33.根据本技术一实施例的车辆,还包括分别布置在所述车辆的四个角上的四个毫米波雷达。
附图说明
34.从结合附图的以下详细说明中,将会使本技术的上述和其他目的及优点更加完整清楚。
35.图1示出根据本技术的一个实施例的用于车辆的支架总成的俯视图。
36.图2示出根据本技术的一个实施例的用于车辆的支架以及安装于其上的部件的爆炸图。
37.图3示出图2中所示的用于车辆的支架的前视图。
38.图4示出图2中所示的用于车辆的支架的俯视图。
39.图5示出图2中所示的用于车辆的支架的右侧视图。
40.图6示出根据本技术的一个实施例的后侧架体以及安装于其上的部件的仰视图。
41.图7示出根据本技术的一个实施例的后侧架体以及安装于其上的部件的后视图。
42.图8示出图7中所示的各部件的爆炸图。
43.图9示出图6中所示的各部件沿轴线a
‑
a'的剖视图。
44.图10示出根据本技术的一个实施例的车辆的俯视图。
具体实施方式
45.应理解,这里所使用的术语“车辆”或者其他类似的术语包括一般的机动车辆,例如乘用车(包括运动型多用途车、公共汽车、卡车等)、各种商用车、船舶、飞机等等,并包括混合动力汽车、电动车、插电式混动电动车等。混动动力汽车是一种具有两个或更多个功率源的车辆,例如汽油动力和电动车辆。
46.还需要说明的是,本技术的说明书和权利要求书中的术语“第一”、“第二”、“第三”、“第四”、“第五”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。此外,术语“包括”、“包含”以及类似表述意在表示不排他的包含,除非另外特别指明。此外,术语“安装”意在表示直接接触安装或通过一个或多个中间部件而接触安装。
47.还需要说明的是,本技术的说明书和权利要求书中,车辆坐标系的原点与质心重合,车辆的纵向轴意在表示平行于地面指向车辆的前方,车辆横向轴意在表示平行于地面指向驾驶员的左侧,车辆竖向轴意在表示通过汽车质心指向上方。此外,“前向”、“前方”意在表示车辆行驶的方向,“后方”、“后向”意在表示车辆行驶的反方向。
48.在下文中,将参考附图详细地描述根据本技术的各示例性实施例。
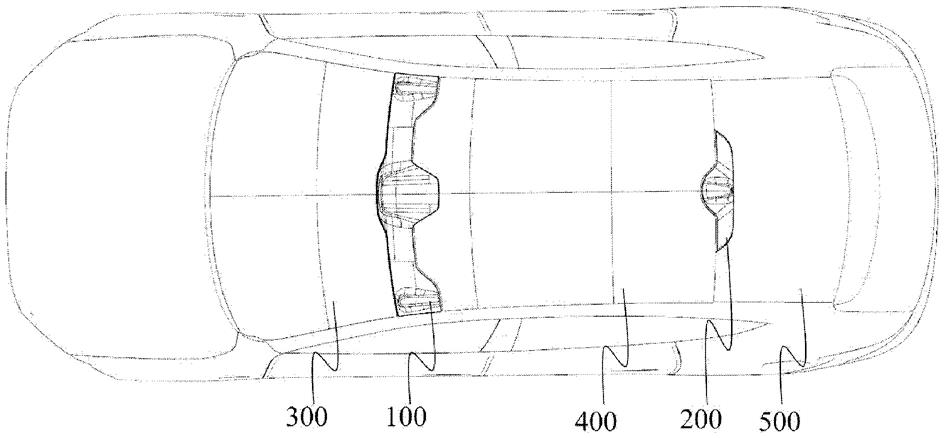
49.图1示出根据本技术的一个实施例的用于车辆的支架总成的俯视图。如图1所示,
该支架总成包括前侧架体100和后侧架体200。前侧架体100和后侧架体200都安装至车辆的顶部。如图1所示,前侧架体100可安装在前风挡300和车顶板400之间,后侧架体200可安装在车顶板400和后风挡500之间。其中,车顶板可以是金属、玻璃等任何合适的材料。其中,前侧架体100和后侧架体200可通过螺栓、卡扣等方式安装至车辆顶部。此外,前侧架体100和后侧架体200可以均沿车辆的纵向轴方向是中心对称的。此外,后侧架体200可以是如图1所示的鲨鱼鳍形状的,从而还可为车辆提供换流、降风阻、导静电等作用。应当注意的是,本技术中所讨论的后侧支架不限于这样的鲨鱼鳍形状,也可以是其他任何适当的形状。
50.图2示出了根据本技术的一个实施例的用于车辆的支架以及安装于其上的部件的爆炸图。其中,前侧架体100、图像传感器连接部101、图像传感器连接部102和激光雷达连接部103组成了该支架。进一步,该支架的前视图、俯视图和右侧视图分别可参考图3、图4和图5所示。
51.继续参考图2,图像传感器连接部101、图像传感器连接部102分别布置在前侧架体100的左右两侧。进一步,图像传感器连接部101、图像传感器连接部102可以车辆的纵向轴为中心对称地布置。以此方式,图像传感器连接部101、图像传感器连接部102位于车辆的a柱上方,这也可以从图1中示出。其中,“左右两侧”意在表示沿车辆横向y轴方向的左右两侧。这使得安装至其上的图像传感器有广阔的视场角,减少了图像传感器的视场角盲区。
52.图像传感器连接部101、图像传感器连接部102分别安装有图像传感器104和图像传感器105,从而将图像传感器104和图像传感器105沿车辆的纵向轴对称地固定在车辆顶部。其中,图像传感器104和图像传感器105可以是侧前视图像传感器,并且两者之间的视场角在车辆前向可以具有重叠区域,从而实现双目测距,彼此配合而实现车辆前向视场角的全覆盖。
53.激光雷达连接部103安装至前侧架体100上,同时也安装有激光雷达106于其上。通过这种方式,激光雷达106经由激光雷达连接部103固定在车辆顶部。此外,激光雷达连接部103可布置在车辆的纵向轴上。其中,激光雷达106可覆盖图像传感器104和105无法准确识别的场景,例如,大块静止物体、夜间无光照场景等。此外,激光雷达106还可动态调整关键区域(region of interest, roi),从而对关键目标进行实时、动态追踪,基于车辆运行状态对关键区域进行动态凝视。
54.图6示出根据本技术的一个实施例的后侧架体以及安装于其上的部件的仰视图。图6中示出的后侧架体200具有制动灯连接部201(具体地,制动灯连接部201a、201b、201c和201d)布置于其上。高位制动灯202安装至制动灯连接部201a、201b、201c和201d,从而将高位制动灯202固定在后侧架体200上。制动灯连接部201a、201b、201c和201d可以是如图6所示的4个连接部,也可以根据情况是任意适当数量的连接部。此外,制动灯连接部201a、201b、201c和201d可以与后侧架体200是一体化的,也可以与后侧架体200是相互分立的部件。高位制动灯202可通过自攻钉、螺栓等方式安装至制动灯连接部201a、201b、201c和201d。
55.图7示出根据本技术的一个实施例的后侧架体以及安装于其上的部件的后视图。如图7所示,后侧架体200上安装有高位制动灯202和图像传感器204。图8为图7中所示的后侧架体以及安装于其上的部件的爆炸图。从图8中可以看到,图像传感器204通过图像传感器连接部203安装至后侧架体200。此处,图像传感器204是后视图像传感器。
56.图9是图6中的各部件沿轴线a
‑
a'的剖视图。如图9所示,后侧架体200上布置有制动灯连接部201e,高位制动灯202可通过胶带205安装至制动灯连接部201e。应当注意的是,高位制动灯也可以采用例如胶水等其他粘接方式安装至制动灯连接部201e。其中,制动灯连接部201e可以是如图9所示的1个连接部,也可以根据情况是任意数量的连接部。并且,制动灯连接部201e、图像传感器连接部203可以与后侧架体200是一体化的,也可以与后侧架体200是相互分立的部件。从图9还可看到,高位制动灯202可通过螺接的方式安装至制动灯连接部201a,即定位销201a。此外,从图9还可看到,后侧架体200上还布置有制动灯连接部201f。高位制动灯202通过屋檐式塔接的方式安装至制动灯连接部201f。
57.上述各连接部,即,图像传感器连接部101、图像传感器连接部102、激光雷达连接部103、制动灯连接部201以及图像传感器连接部203可统称为连接体。应当注意的是,本技术中所使用的“连接体”可能仅包括以上提及的连接部中的一部分,而非所有连接部;亦可能除了这些连接部之外,还包括其他连接部。还应当注意的是,在本技术中所使用的“连接体”可以是一体部件(例如,连接体由两个图像传感器连接部和一个激光雷达连接部组成,且这三者被制造为一体部件),也可以是由多个分立部件共同组成的(例如,连接体由图1中所示的三个分立部件,图像传感器连接部101、图像传感器连接部102、激光雷达连接部103组成)。还应当注意的是,在本技术中所使用的“连接体”所包括的连接部可能与前侧架体、后侧架体是一体塑形的,也可能与前侧架体、后侧架体是分立的。
58.图10是根据本技术的一个实施例的车辆的俯视图。车辆1000上布置有如图2所示的支架。侧前视图像传感器1004和侧前视图像传感器1005通过该支架布置在车辆1000的a柱上方。这使得安装至其上的图像传感器有广阔的视场角,减少了图像传感器的视场角盲区。其中,图像传感器1004和图像传感器1005可以是侧前视图像传感器,并且两者之间的视场角在车辆前向可以具有重叠区域,从而实现双目测距,彼此配合而实现车辆前向视场角的全覆盖。激光雷达1006通过该支架安装至车辆1000的顶部。其中,激光雷达1006可覆盖图像传感器1004和1005无法准确识别的场景。例如,大块静止物体、夜间无光照场景等。此外,激光雷达1006还可动态调整关键区域(region of interest,roi),从而对关键目标实时、动态追踪,基于车辆运行状态对关键区域进行动态凝视。
59.可选地,如图10所示的车辆1000上还布置有后侧架体,例如,如图7所示的后侧架体。后视图像传感器1001通过后侧架体布置在车辆1000的后窗上沿。
60.可选地,如图10所示的车辆1000上还布置有侧后视图像传感器1002、1003。侧后视图像传感器1002、1003可具体布置在车辆1000的翼子板上。后视图像传感器1001、侧后视图像传感器1002和1003以及侧前视图像传感器1004和1005的组合实现了车身周围环境的全覆盖,保证了对目标车辆追踪的连贯性。
61.可选地,如图10所示的车辆1000上还布置有前视图像传感器1007和1008。其中,前视图像传感器1007是广角摄像头,而前视图像传感器1008是窄角摄像头。其中,前视图像传感器1007和1008可布置在前窗玻璃后方。前视窄角、广角摄像头的组合,实现了对远、近距离目标的同时感知。
62.可选地,如图10所示的车辆1000上还布置有环视图像传感器1009a、1009b、1009c和1009d。其中,环视图像传感器1009a、1009b可布置在车辆左右两侧后视镜上,而环视图像传感器1009c、1009d可布置在车辆1000的前侧和后侧。例如,环视图像传感器1009c、1009d
可分别布置在车辆1000的前保险杠和后尾门饰板上。环视图像传感器1009a、1009b、1009c和1009d提供对车身周围环境的全覆盖。
63.当环视图像传感器1009a、1009b、1009c和1009d以及后视图像传感器1001、侧后视图像传感器1002和1003以及侧前视图像传感器1004和1005一起配合使用时,还可提供对车身周围环境的全覆盖冗余监测。其中,环视图像传感器1009a、1009b、1009c和1009d的像素值可设置为低于后视图像传感器1001、侧后视图像传感器1002和1003以及侧前视图像传感器1004和1005的像素值。例如,环视图像传感器的像素值设为2m,其他图像传感器的像素值设为8m。由于较高的像素值可以更准确的监测到远距离的图像,而较低的像素值可提供更好的夜间感光性,因此,这样的配置使得车辆1000同时兼顾了远距离感知和高感光性。
64.可选地,如图10所示的车辆1000上还布置有车内图像传感器1010。车内图像传感器1010可以是布置在车内转向柱上的疲劳驾驶监测系统(driving monitor system,dms)。车内图像传感器1010通过监测驾驶者的眼皮跳动等方法来监测驾驶者的疲劳状态,在驾驶者疲劳度达到阈值时,触发预警系统。
65.可选地,如图10所示的车辆1000的前挡板上布置有前向毫米波雷达1011,并且还可在车辆1000的四个角上布置有转角毫米波雷达1012a、1012b、1012c和1012d。其中,前向毫米波雷达1011可以是长距毫米波雷达,而转角毫米波雷达1012a、1012b、1012c和1012d可以是中距毫米波雷达。
66.综上,本技术的技术方案通过布置在车辆顶部的支架将侧前视图像传感器布置在a柱上方,从而可得到广阔的视场角,减少了视场角盲区。布置在车辆顶部的支架上还可集成有激光雷达、后视图像传感器、制动灯等部件,降低了结构设计的空间需求,减少了整车制造生产线的装配难度,降低了累计的尺寸链公差。
67.以上尽管只对其中一些本技术的实施方式进行了描述,但是本领域普通技术人员应当了解,本技术可以在不偏离其主旨与范围内以许多其他的形式实施。因此,所展示的例子与实施方式被视为示意性的而非限制性的,在不脱离如所附各权利要求所定义的本技术精神及范围的情况下,本技术可能涵盖各种的修改与替换。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。