1.本实用新型涉及注塑工件后期加工设备,尤其涉及一种注塑工件切水口装置。
背景技术:
2.注塑工件在完成注塑成型工艺之后,一般会涉及直入五金件、切水口以及套接密封圈等加工流程。实际应用中,注塑工件在成型之后,每两个工件之间具有连接水口,在后期加工时,需要将水口去除,但是现有的切水口方式一般采用人工配合相应的工具进行切割,导致水口切除位置的平整度、一致性不佳,从而影响工件的产品质量,同时也具有较高的人工成本。
技术实现要素:
3.本实用新型要解决的技术问题在于,针对现有技术的不足,提供一种能保证水口切除位置的平整度、一致性更佳,从而提升工件的产品质量以及节省人工成本的注塑工件切水口装置。
4.为解决上述技术问题,本实用新型采用如下技术方案。
5.一种注塑工件切水口装置,所述切水口装置包括有切水口支座、升降板以及用于驱使所述升降板上升或者下降的升降机构,所述切水口支座上用于放置多个工件,所述升降板位于所述切水口支座的上方,所述升降板的底部设有多个定位夹爪,所述定位夹爪与所述工件一一对应,且所述定位夹爪用于夹持所述工件的上端,相邻两个定位夹爪之间设有切料气缸,所述切料气缸固定于所述升降板的底部,所述切料气缸的驱动端设有切料杆,所述切料杆的端部形成有切削刃,所述切削刃与相邻两个工件之间的水口对齐,当所述切料气缸驱使所述切料杆运动时,通过所述切削刃将所述水口切除。
6.优选地,所述升降机构包括有升降支架和升降气缸,所述升降气缸的驱动端设有升降导杆,所述升降气缸固定于所述升降支架上,所述升降导杆竖直设置,且所述升降导杆的下端连接于所述升降板。
7.优选地,所述定位夹爪为气动夹爪。
8.优选地,相邻两个定位夹爪之间设有滑座,所述滑座固定于所述升降板的底部,所述切料气缸固定于所述滑座的侧部。
9.优选地,所述滑座上开设有滑槽,所述切料杆设于所述滑槽内且二者滑动配合。
10.优选地,包括有一基座,所述切水口支座和所述升降支架均固定于所述基座上。
11.本实用新型公开的注塑工件切水口装置中,当所述工件被放置于所述切水口支座时,所述升降机构驱使所述升降板下降,同时令所述定位夹爪夹紧所述工件的上端,进而将所述工件定位于所述切水口支座上,然后所述切料气缸驱使所述切料杆运动,利用所述切削刃将所述水口切除。相比现有技术中采用人工切水口的方式而言,本实用新型能保证水口切除位置的平整度、一致性更佳,大大提升了工件的产品质量,同时也节省了人工成本,较好地满足了生产要求。
附图说明
12.图1为工件加工设备的俯视图;
13.图2为五金件直入装置和切水口装置的结构图一;
14.图3为五金件直入装置和切水口装置的结构图二;
15.图4为五金件直入装置和切水口装置的结构图三;
16.图5为机械手装置的结构图;
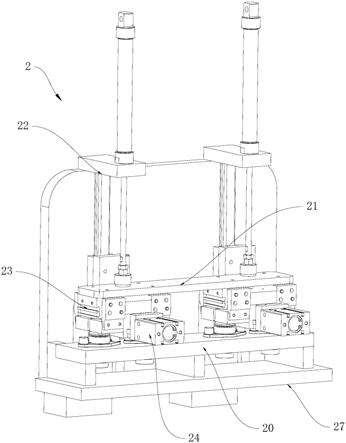
17.图6为切水口装置的立体图;
18.图7为切水口支座的结构图;
19.图8为升降机构的结构图一;
20.图9为升降机构的结构图二;
21.图10为切料气缸的结构图;
22.图11为套密封圈装置的结构图一;
23.图12为套密封圈装置的结构图二;
24.图13为套密封圈装置的结构图三。
具体实施方式
25.下面结合附图和实施例对本实用新型作更加详细的描述。
26.实施例一
27.本实施例提出了一种注塑工件切水口装置,结合图6至图10所示,所述切水口装置2包括有切水口支座20、升降板21以及用于驱使所述升降板21上升或者下降的升降机构22,所述切水口支座20上用于放置多个工件100,所述升降板21位于所述切水口支座20的上方,所述升降板21的底部设有多个定位夹爪23,所述定位夹爪23与所述工件100一一对应,且所述定位夹爪23用于夹持所述工件100的上端,相邻两个定位夹爪23之间设有切料气缸24,所述切料气缸24固定于所述升降板21的底部,所述切料气缸24的驱动端设有切料杆241,所述切料杆241的端部形成有切削刃240,所述切削刃240与相邻两个工件100之间的水口101对齐,当所述切料气缸24驱使所述切料杆241运动时,通过所述切削刃240将所述水口101切除。
28.上述装置中,当所述工件100被放置于所述切水口支座20时,所述升降机构22驱使所述升降板21下降,同时令所述定位夹爪23夹紧所述工件100的上端,进而将所述工件100定位于所述切水口支座20上,然后所述切料气缸24驱使所述切料杆241运动,利用所述切削刃240将所述水口101切除。相比现有技术中采用人工切水口的方式而言,本实用新型能保证水口切除位置的平整度、一致性更佳,大大提升了工件的产品质量,同时也节省了人工成本,较好地满足了生产要求。
29.关于所述升降机构22的具体结构,本实施例中,所述升降机构22包括有升降支架220和升降气缸221,所述升降气缸221的驱动端设有升降导杆222,所述升降气缸221固定于所述升降支架220上,所述升降导杆222竖直设置,且所述升降导杆222的下端连接于所述升降板21。
30.作为一种优选方式,所述定位夹爪23为气动夹爪。
31.本实施例中,相邻两个定位夹爪23之间设有滑座26,所述滑座26固定于所述升降
板21的底部,所述切料气缸24固定于所述滑座26的侧部。
32.为保证所述切料杆241稳定运动,本实施例中,所述滑座26上开设有滑槽260,所述切料杆241设于所述滑槽260内且二者滑动配合。
33.为了起到支撑作用,本实施例包括有一基座27,所述切水口支座20和所述升降支架220均固定于所述基座27上。
34.实施例二
35.本实施例提出了一种用于装配五金件和密封圈的工件加工设备,结合图1至图5所示,其包括有五金件直入装置1、切水口装置2、套密封圈装置3和多轴机器人4,所述多轴机器人4的端部设有用于拾取工件100的机械手装置40,其中:
36.所述多轴机器人4用于驱使所述机械手装置40运动,以令所述机械手装置40将所述工件100依次传送至所述五金件直入装置1、所述切水口装置2和所述套密封圈装置3;
37.所述五金件直入装置1用于将五金件直入所述机械手装置40拾取的所述工件100内;
38.所述切水口装置2用于将连接于相邻两个工件100之间的水口101切除;
39.所述套密封圈装置3用于将密封圈套装于所述工件100上。
40.上述设备在执行过程中,先控制所述多轴机器人4运动,并驱使所述机械手装置40将所述工件100传送至所述五金件直入装置1,然后所述五金件直入装置1将五金件直入所述机械手装置40拾取的所述工件100内,接下来,所述多轴机器人4再次运动,驱使所述机械手装置40从所述五金件直入装置1拾取所述工件100并放置于所述切水口装置2,利用所述切水口装置2将连接于相邻两个工件100之间的水口101切除,之后所述多轴机器人4继续运动,驱使所述机械手装置40从所述切水口装置2拾取所述工件100并放置于所述套密封圈装置3,最后利用所述套密封圈装置3将密封圈套装于所述工件100上。基于上述原理可见,本实用新型能自动化执行直入五金件、切水口和套密封圈的过程,相比现有技术而言,本实用新型无需手工操作,大大提高了注塑工件的后期加工品质,有效提高了生产效率,并能够节省人工成本,进而满足生产要求。
41.作为一种优选方式,包括有第一机台5和第二机台6,所述五金件直入装置1和所述切水口装置2均设于所述第一机台5上,所述套密封圈装置3设于所述第二机台6上,所述多轴机器人4设于所述第一机台5和所述第二机台6之间。
42.为了实现五金件自动直入,本实施例中,所述五金件直入装置1包括有分料板110和推料气缸120,所述分料板110上开设有多个分料槽111,所述分料板110的外侧固定有治具板且二者层叠设置,所述治具板和所述分料板110上分别开设有相互对称的通孔112,所述通孔112与所述分料槽111一一对应且相互连通,所述推料气缸120位于所述分料板110背向所述治具板的一侧,所述推料气缸120的驱动端设有多个推料杆121,所述推料杆121与所述通孔112一一对应,且所述推料杆121插设于所述通孔112内,当所述机械手装置40拾取的工件100置于所述治具板的侧部时,所述推料气缸120驱使多个推料杆121同步运动,借由多个推料杆121将所述通孔112内的五金件推入所述工件100的对应孔位内。
43.进一步地,所述第一机台5上固定有推料支架122,所述推料气缸120固定于所述推料支架122的上端。
44.为了持续、准确地供应五金件,本实施例中,所述五金件直入装置1包括有用于输
送五金件的振动盘113,所述振动盘113的出料口与所述分料板110的入料口之间连通有送料滑道114。
45.作为一种优选方式,所述机械手装置40包括有取料支架400,所述取料支架400安装于所述多轴机器人4的端部,所述取料支架400上设有多个用于夹持工件100的取料夹爪401。
46.进一步地,多个取料夹爪401由上至下依次设置,多个通孔112由上至下依次分布。
47.为了提高机械手结构稳定性以及实现功能扩展,本实施例中,所述取料支架400是包括有第一竖向支臂402和第二竖向支臂403的“工”形支架,多个取料夹爪401均设于所述第一竖向支臂402上。
48.作为一种优选方式,所述第二竖向支臂403上固定有多个套管404,所述套管404和所述取料夹爪401位于所述取料支架400的同一侧,且所述套管404与所述通孔112一一对应,所述第二竖向支臂403背向所述套管404的一侧设有活动板405,所述活动板405上固定有多个定位推杆406及一定位气缸407,所述定位推杆406与所述套管404一一对应,所述定位推杆406穿过所述第二竖向支臂403并插设于所述套管404内,且所述定位推杆406与所述套管404滑动配合,所述定位气缸407的伸缩轴与所述第二竖向支臂403固定连接。
49.其中在所述套管404、所述定位推杆406和所述推料杆121的作用下,可将待直入的工件定位于所述通孔112内,该结构有助于将所述通孔112内的五金件准确可靠地推入所述工件100内。
50.本实施例还涉及一种用于装配五金件和密封圈的工件加工工艺,结合图1至图5所示,该工艺基于一设备实现,所述设备包括有五金件直入装置1、切水口装置2、套密封圈装置3和多轴机器人4,所述多轴机器人4的端部设有用于拾取工件100的机械手装置40,所述工艺包括:
51.步骤s1,所述多轴机器人4运动,并驱使所述机械手装置40将所述工件100传送至所述五金件直入装置1;
52.步骤s2,所述五金件直入装置1将五金件直入所述机械手装置40拾取的所述工件100内;
53.步骤s3,所述多轴机器人4再次运动,驱使所述机械手装置40从所述五金件直入装置1拾取所述工件100并放置于所述切水口装置2;
54.步骤s4,所述切水口装置2将连接于相邻两个工件100之间的水口101切除;
55.步骤s5,所述多轴机器人4继续运动,驱使所述机械手装置40从所述切水口装置2拾取所述工件100并放置于所述套密封圈装置3;
56.步骤s6,所述套密封圈装置3将密封圈套装于所述工件100上。
57.实施例三
58.实际应用中,对于一些需要装配密封圈的注塑工件而言,其需要通过人工方式,将密封圈手动套设于注塑工件上,这种套接方式不仅效率低下,而且套接过程中容易造成密封圈损坏,导致产品的密封性能不足,此外,因缺乏密封圈检测机制,所以很容易出现误套、漏套密封圈等情况,导致装配品质不足,不能满足生产要求。
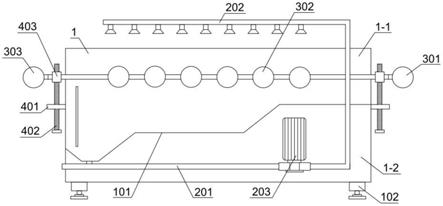
59.对此,本实施例提出了一种能够提高密封圈装配品质、具有密封圈检测功能、能够提高生产效率以及节省人工成本的注塑工件套密封圈装置,结合图11至图13所示,所述套
密封圈装置3包括有旋转台30、压密封圈机构31、密封圈检测机构32和下料机构33,所述旋转台30上设有四个用于放置工件100的工件支座33,四个工件支座33之一用于放置待加工的工件100,所述压密封圈机构31、所述密封圈检测机构32和所述下料机构33分别设于另外三个工件支座33的上方,当所述旋转台30旋转时带动所述工件支座33上的工件100依次经过所述压密封圈机构31、所述密封圈检测机构32和所述下料机构33,其中:
60.所述压密封圈机构31用于对放置于所述工件100顶端的密封圈进行下压,以令所述密封圈套设于所述工件100上;
61.所述密封圈检测机构32用于对所述工件100上套设的密封圈进行检测;
62.所述下料机构33用于将套设有密封圈的所述工件100从所述工件支座33上取出。
63.上述装置中,在所述旋转台30上设置四个工件支座33,因此可将四个工件100分别装载于四个工件支座33上,对于处在上料位置的工件支座33,可以手动将密封圈放置于该工件支座33上的工件顶端,当所述旋转台30旋转时,可带动所述工件支座33上的工件100依次经过所述压密封圈机构31、所述密封圈检测机构32和所述下料机构33,进而利用所述压密封圈机构31下压工件顶端的密封圈,直至将密封圈可靠地套设于所述工件100上,整个套接过程无需手动操作。之后利用所述密封圈检测机构32对所述工件100上的密封圈安装状态进行检测,以避免出现误装、漏装密封圈的情况,最后利用所述下料机构33将已装有密封圈的工件100从所述工件支座33上取下。相比现有技术而言,本实用新型能有效提高密封圈的装配品质,同时具有密封圈检测功能,能够保证密封圈装配的准确性与可靠性,此外,本实用新型还有助于提高生产效率以及节省人工成本,进而满足生产要求。
64.进一步地,四个工件支座33分设于同一直角坐标系的四个坐标轴上。上述结构设置,可使得所述旋转台30每旋转90
°
,即可带动所述工件100平移一个工位。
65.关于所述压密封圈机构31的具体结构,本实施例中,所述压密封圈机构31包括有第一支架310、压密封圈气缸311和套筒312,所述压密封圈气缸311固定于所述第一支架310上,所述套筒312设于所述压密封圈气缸311的驱动端,所述压密封圈气缸311用于驱使所述套筒312下压密封圈,进而将所述密封圈套所述工件100上。
66.为了保证所述套筒312可靠地上下运动,本实施例中,所述第一支架310上固定有竖直滑轨313,所述竖直滑轨313上设有竖直滑座314且二者滑动配合,所述套筒312与所述竖直滑座314固定连接。
67.关于所述密封圈检测机构32的具体结构,本实施例中,所述密封圈检测机构32包括有第二支架320、检测气缸321和多个光纤传感器322,所述检测气缸321竖直固定于所述第二支架320上,所述检测气缸321的驱动端设有光纤安装板323,多个光纤传感器322均固定于所述光纤安装板323上,且所述光纤传感器322的感应端与所述工件100上套设的密封圈对齐。
68.本实施例中采用光纤传感器322仅是一种优选的实现方式,并不用于限制本实用新型,根据实际需要,还可以采用其他具有同等功能的传感器,而无论选用何种传感器,均是在本实用新型精神指导之下作出的等同替换,因此均属于本实用新型的保护范围。
69.作为一种优选方式,所述旋转台30的相邻处设有下料导槽34。
70.关于所述下料机构33的具体结构,本实施例中,所述下料机构33包括有第三支架330,所述第三支架330上固定有横向滑轨331,所述横向滑轨331上设有横向滑座332且二者
滑动配合,所述横向滑座332上固定有平移气缸333,且所述平移气缸333的驱动端与所述第三支架330固定连接,所述平移气缸333的侧部固定有竖直设置的下料气缸334,所述下料气缸334的驱动端设有下料夹爪335,所述下料夹爪335与所述工件100对齐,所述下料气缸334用于驱使所述下料夹爪335上升或者下降,以令所述下料夹爪335夹持所述工件100的上端,所述平移气缸333用于驱使所述下料气缸334平移,直至将所述工件100移送至所述下料导槽34上方,当所述下料夹爪335卸掉对所述工件100的夹持力时,令所述工件100掉落于所述下料导槽34内。
71.实际应用中,所述下料夹爪335优选为气动夹爪。
72.以上所述只是本实用新型较佳的实施例,并不用于限制本实用新型,凡在本实用新型的技术范围内所做的修改、等同替换或者改进等,均应包含在本实用新型所保护的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。