1.本发明涉及清洁机器人技术领域,特别是涉及一种喷洒清洁机器人及其控制方法。
背景技术:
2.公共场所人员密集且流动性大,为各种致病源的散播提供了良好的媒介。尤其对于医院、卫生院等医疗场所,各类传染性病源更加集中,若环境清洁消毒不彻底将造成巨大的社会危害。目前,室内地面清洁消毒一般都是由人工完成,不仅费时费力,而且清洁的时效性难以保证。随着我国疫情进入常态化防控状态,消毒防疫工作量增加,清洁范围广泛,清洁流程复杂,并且清洁人员存在感染风险,因此,亟需减少人工参与,增强智能化清洁机器人的参与。
3.清洁机器人可以通过计算机编程来实现其对其进行清洁操作,而无需人工干预,运用了计算机、传感、信息、通信、导航、人工智能及自动控制等技术,是典型的高新技术综合体。目前,大多清洁机器人智能化程度低,遇到障碍时往往需要人工协助处理,并且需要人工操控行走,达不到自主清洁的要求。此外,大多清洁机器人功能单一,导致清洁机器人清洁效率低下。
技术实现要素:
4.本发明的目的是提供一种喷洒清洁机器人及其控制方法,由机械臂搭载喷头组件灵活调节喷洒位置,提高了喷洒清洁精确度,并且气液混合提高了喷洒清洁效果,能够自主导航定位,具有智能化程度高、移动灵活性高、工作范围广的特点。
5.为实现上述目的,本发明提供了如下方案:
6.一种喷洒清洁机器人,包括:机器人机身以及设置在机器人机身底部的行走装置,所述机器人机身上设置有控制柜、双目相机、机械臂以及喷洒清洁装置,所述喷洒清洁装置包括喷头组件以及与喷头组件相连通的空压机和主储液罐,所述空压机用于为所述喷头组件供气,所述主储液罐用于为所述喷头组件供液,所述喷头组件设置在所述机械臂上,所述机械臂上还设置有视觉检测装置;
7.所述控制柜内设置有供电模块、pc机、plc控制器、机械臂控制器,所述供电模块为机器人提供电能,所述pc机分别与所述行走装置、双目相机、视觉检测装置、plc控制器、机械臂控制器连接;所述plc控制器与喷洒清洁装置电性连接,所述机械臂控制器与所述机械臂连接。
8.可选的,所述行走装置为agv小车,所述agv小车包含agv控制模块,所述agv控制模块与所述pc机电性连接。
9.可选的,所述机器人还包括监控摄像机和无线通信模块,所述监控摄像机设置在所述机器人机身上,所述无线通信模块设置在控制柜内,所述监控摄像机和无线通信模块分别与所述pc机连接,所述pc机通过所述无线通信模块与后台监控服务器通信连接。
10.可选的,所述空压机通过输气管道与所述喷头组件连通,所述输气管道上设置有比例减压阀和电磁阀,所述喷头组件通过输液管道与所述主储液罐相连通,所述输液管道上设置有喷雾泵、流量控制阀以及单向阀,所述空压机、比例减压阀、电磁阀、喷雾泵、流量控制阀分别与所述plc控制器电性连接。
11.可选的,所述空压机、主储液罐、喷雾泵设置在二流体装配柜内,所述二流体装配柜通过抽拉轨道滑动连接在所述机器人机身上。
12.可选的,所述主储液罐的底部设置有称重传感器,所述称重传感器与所述plc控制器电性连接。
13.可选的,所述视觉检测装置为单目视觉相机或双目视觉相机。
14.可选的,所述行走装置上设置有激光雷达,所述控制柜上还设置有触摸屏,所述激光雷达、触摸屏分别与所述pc机电性连接。
15.本发明还提供了一种喷洒清洁机器人的控制方法,应用于上述的喷洒清洁机器人,包括以下步骤:
16.通过双目相机采集待清洁区域图像,pc机利用神经网络算法对待清洁区域图像进行目标识别和语义分割,获取待清洁物体相对于机器人所在的中心坐标位置;
17.机器人基于slam技术,进行自主定位导航,向待清洁物体所在位置移动,同时,移动过程中,机械臂带动喷头组件摆动,对待清洁区域进行摆动喷雾清洁;
18.移动到待清洁物体所在位置,控制喷洒清洁装置配合机械臂对待清洁物体进行定点喷洒清洁。
19.可选的,所述控制喷洒清洁装置配合机械臂对待清洁物体进行定点喷洒清洁,具体包括:
20.通过机械臂上设置的视觉检测装置获取待清洁物体的三维模型信息,以获得待清洁物体与机器人的相对位置信息;
21.对机械臂进行轨迹规划;
22.根据轨迹规划进行定点喷洒清洁;
23.重复以上过程直到清洁完毕。
24.根据本发明提供的具体实施例,本发明公开了以下技术效果:本发明提供的喷洒清洁机器人及其控制方法,具有“手
‑
眼
‑
腿
‑
脑”综合功能,分别是:第一,“手”—在机器人机身上设置机械臂,用于搭载喷头组件,实现行走摆动喷雾清洁以及定点喷雾清洁;第二,“眼”—设置双目相机识别待清洁物体,能够获取待清洁物体的坐标信息,驱动机器人前往清洁,真正做到精准化清洁,提高清洁的效率;第三,“腿”—设置agv小车作为行走装置,能够实现自主移动、导航、路径规划,实现清洁机器人的自主定位和建图功能;第四,“脑”—pc机能够综合控制各个装置,与各个装置信息交互,实现智能化控制和各类信息的综合处理;此外,喷洒清洁装置通过气液混合,增强清洁液雾化效果,提高清洁液效率。
附图说明
25.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图
获得其他的附图。
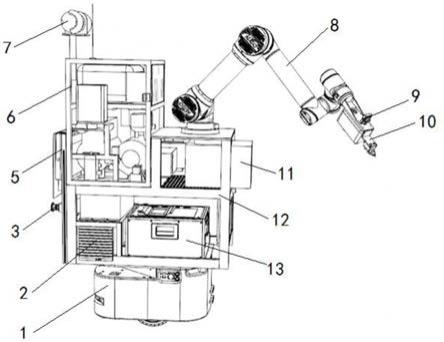
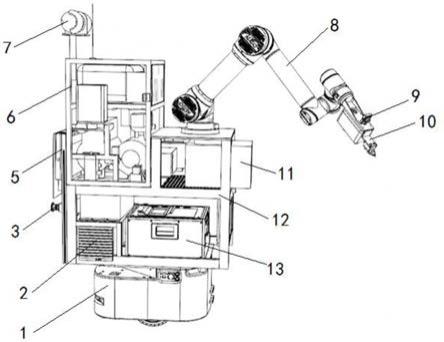
26.图1为本发明实施例喷洒清洁机器人的整装结构示意图;
27.图2为本发明实施例喷洒清洁机器人的爆炸结构示意图;
28.图3为本发明实施例喷洒清洁装置的结构示意图;
29.图4为本发明实施例喷洒清洁机器人的控制原理框图;
30.图5为本发明实施例喷洒清洁机器人的控制方法流程图;
31.附图标记:1、agv小车;2、散热风扇;3、急停按钮;4、双目相机;5、触摸屏;6、二流体装配柜;7、监控摄像机;8、机械臂;9、视觉检测装置;10、喷头组件;11、pc机;12、控制柜;13、机械臂控制器;14、usb扩展口;15、plc控制器;16、示教器;17、端子排;18、逆变器;19、电池板;
[0032]3‑
1、主储液罐;3
‑
2、喷雾泵;3
‑
3、输液管道;3
‑
4、流量控制阀;3
‑
5、单向阀;3
‑
6、喷头组件;3
‑
7、输气管道;3
‑
8、电磁阀;3
‑
9、比例减压阀;3
‑
10、空压机;3
‑
11、称重传感器。
具体实施方式
[0033]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0034]
本发明的目的是提供一种喷洒清洁机器人及其控制方法,由机械臂搭载喷头组件灵活调节喷洒位置,提高了喷洒清洁精确度,并且气液混合提高了喷洒清洁效果,能够自主导航定位,具有智能化程度高、移动灵活性高、工作范围广的特点。
[0035]
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
[0036]
如图1
‑
图4所示,本发明实施例提供的喷洒清洁机器人,包括:机器人机身以及设置在机器人机身底部的行走装置,所述机器人机身上设置有控制柜12、监控摄像机7、双目相机4、机械臂8以及喷洒清洁装置,所述喷洒清洁装置包括喷头组件10以及与喷头组件10相连通的空压机和主储液罐,所述空压机用于为所述喷头组件10供气,所述主储液罐用于为所述喷头组件10供液,所述喷头组件10设置在所述机械臂8上,所述机械臂8上还设置有视觉检测装置9;
[0037]
所述控制柜12内设置有供电模块、pc机11、plc控制器15、机械臂控制器13,所述供电模块为机器人提供电能,所述pc机11分别与所述行走装置、双目相机4、视觉检测装置9、plc控制器15、机械臂控制器13连接;所述plc控制器15与喷洒清洁装置电性连接,所述机械臂控制器13与所述机械臂8连接。
[0038]
所述行走装置为agv小车1,所述agv小车1包含agv控制模块,所述agv控制模块与所述pc机11电性连接。
[0039]
所述机器人还包括监控摄像机7和无线通信模块,所述监控摄像机7设置在所述机器人机身上,所述无线通信模块设置在控制柜12内,所述监控摄像机7和无线通信模块分别与所述pc机11连接,所述pc机11通过所述无线通信模块与后台监控服务器通信连接。
[0040]
如图3所示,所述空压机3
‑
10通过输气管道3
‑
7与所述喷头组件10连通,所述喷头
组件10包括喷头3
‑
6,所述输气管道3
‑
7上设置有比例减压阀3
‑
9和电磁阀3
‑
8,所述主储液罐3
‑
1通过输液管道3
‑
3与所述喷头3
‑
6相连通,所述输液管道3
‑
3上设置有喷雾泵3
‑
2、流量控制阀3
‑
4以及单向阀3
‑
5,所述空压机3
‑
10、比例减压阀3
‑
9、电磁阀3
‑
8、喷雾泵3
‑
2、流量控制阀3
‑
4分别与所述plc控制器15电性连接。
[0041]
所述主储液罐3
‑
1的底部设置有称重传感器3
‑
11,所述称重传感器3
‑
11与所述plc控制器15电性连接。
[0042]
所述空压机3
‑
10、主储液罐3
‑
1、喷雾泵3
‑
2设置在二流体装配柜6内,所述二流体装配柜6通过抽拉轨道滑动连接在所述机器人机身上。
[0043]
所述视觉检测装置9为单目视觉相机或双目视觉相机。
[0044]
所述行走装置上设置有激光雷达,所述控制柜上还设置有触摸屏4,所述激光雷达、触摸屏4分别与所述pc机11电性连接。
[0045]
其中,pc机11还连接有交换机、dc/dc模块、急停按钮3;无线通信模块由4g无线路由器等组成。供电模块包括电池板19、接触器、端子排17、逆变器18、继电器板、充电孔等结构,所述端子排17上连接断路器、熔断器等,所述机械臂控制器13还可以连接示教器16。所述控制柜12上还设置有散热风扇2,用于为控制柜12散热。
[0046]
如图5所示,本发明还提供了一种喷洒清洁机器人的控制方法,应用于上述的喷洒清洁机器人,包括以下步骤:
[0047]
通过双目相机采集待清洁区域图像,pc机利用神经网络算法对待清洁区域图像进行目标识别和语义分割,获取待清洁物体相对于机器人所在的中心坐标位置;
[0048]
机器人基于slam技术,进行自主定位导航,向待清洁物体所在位置移动,同时,移动过程中,机械臂带动喷头组件摆动,对待清洁区域进行摆动喷雾清洁;
[0049]
移动到待清洁物体所在位置,控制喷洒清洁装置配合机械臂对待清洁物体进行定点喷洒清洁。
[0050]
其中,所述控制喷洒清洁装置配合机械臂对待清洁物体进行定点喷洒清洁,具体包括:
[0051]
通过机械臂上设置的视觉检测装置获取待清洁物体的三维模型信息,以获得待清洁物体与机器人的相对位置信息;
[0052]
对机械臂进行轨迹规划;
[0053]
根据轨迹规划进行定点喷洒清洁;
[0054]
重复以上过程直到清洁完毕。
[0055]
本发明提供的喷洒清洁机器人的工作原理:
[0056]
第一,支持喷雾清洁模式,可以人工遥控切换作业,也可将清洁机器人放置于工作环境中,通过按键切换到智能模式自行作业;
[0057]
第二,为了更科学规范的针对不同物体不同等级所需采取的不同清洁模式,也为了对物体更全面的360度清洁,不留死角,本发明提供的机器人通过单目相机和双目相机等传感器获取环境信息,并通过训练好的深度神经网络对清洁物体进行目标检测和环境语义分割,识别并获取待清洁物体相对于机器人所在的中心坐标位置;
[0058]
第三,在获取清洁目标物体相对位置后,通过融合视觉、激光等多种传感器信息的slam技术,实现清洁机器人的自主定位和建图功能,并计算出清洁目标物体所在地图中坐
标位置,通过实时避障路径规划,机器人向清洁目标物体方向移动,在自主移动地过程中需要保持对周围环境的感知并进行实时地图构建更新,并获取自身定位,重复以上过程直到接近待清洁物体;同时,在移动过程中,机械臂控制器还能控制机械臂带动喷头组件进行一定区域内的摆动喷雾清洁,类似人工喷雾动作,提高智能化控制水平;
[0059]
第四,在自主接近代清洁附近后,通过机械臂上的双目视觉系统扫描清洁目标,获取清洁物体的精确三维模型信息,尤其是擦拭清洁目标的在线特征信息,并计算出精确位置关系,融合机械臂柔性控制参数工艺,自主生成机器人喷雾清洁轨迹,实现机器人轨迹的自适应在线规划,从而保证喷洒清洁轨迹的精准性。
[0060]
本发明提供的喷洒清洁机器人及其控制方法,具有“手
‑
眼
‑
腿
‑
脑”综合功能,分别是:第一,“手”—在机器人机身上设置机械臂,用于搭载喷头组件,实现行走摆动喷雾清洁以及定点喷雾清洁;第二,“眼”—设置双目相机识别待清洁物体,能够获取待清洁物体的坐标信息,驱动机器人前往清洁,真正做到精准化清洁,提高清洁的效率;第三,“腿”—设置agv小车作为行走装置,能够实现自主移动、导航、路径规划,实现清洁机器人的自主定位和建图功能;第四,“脑”—pc机能够综合控制各个装置,与各个装置信息交互,实现智能化控制和各类信息的综合处理;此外,喷洒清洁装置通过气液混合,增强清洁液雾化效果,提高清洁液效率。
[0061]
本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。