技术特征:
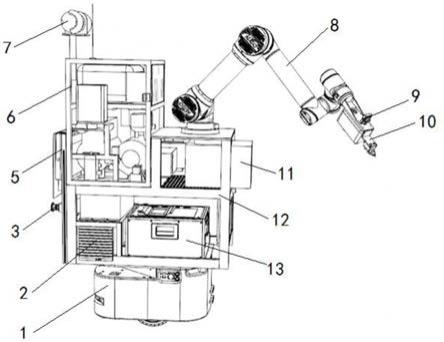
1.一种喷洒清洁机器人,其特征在于,包括:机器人机身以及设置在机器人机身底部的行走装置,所述机器人机身上设置有控制柜、双目相机、机械臂以及喷洒清洁装置,所述喷洒清洁装置包括喷头组件以及与喷头组件相连通的空压机和主储液罐,所述空压机用于为所述喷头组件供气,所述主储液罐用于为所述喷头组件供液,所述喷头组件设置在所述机械臂上,所述机械臂上还设置有视觉检测装置;所述控制柜内设置有供电模块、pc机、plc控制器、机械臂控制器,所述供电模块为机器人提供电能,所述pc机分别与所述行走装置、双目相机、视觉检测装置、plc控制器、机械臂控制器连接;所述plc控制器与所述喷洒清洁装置电性连接,所述机械臂控制器与所述机械臂连接。2.根据权利要求1所述的喷洒清洁机器人,其特征在于,所述行走装置为agv小车,所述agv小车包含agv控制模块,所述agv控制模块与所述pc机电性连接。3.根据权利要求1所述的喷洒清洁机器人,其特征在于,所述机器人还包括监控摄像机和无线通信模块,所述监控摄像机设置在所述机器人机身上,所述无线通信模块设置在控制柜内,所述监控摄像机和无线通信模块分别与所述pc机连接,所述pc机通过所述无线通信模块与后台监控服务器通信连接。4.根据权利要求1所述的喷洒清洁机器人,其特征在于,所述空压机通过输气管道与所述喷头组件连通,所述输气管道上设置有比例减压阀和电磁阀,所述喷头组件通过输液管道与所述主储液罐相连通,所述输液管道上设置有喷雾泵、流量控制阀以及单向阀,所述空压机、比例减压阀、电磁阀、喷雾泵、流量控制阀分别与所述plc控制器电性连接。5.根据权利要求4所述的喷洒清洁机器人,其特征在于,所述空压机、主储液罐、喷雾泵设置在二流体装配柜内,所述二流体装配柜通过抽拉轨道滑动连接在所述机器人机身上。6.根据权利要求4所述的喷洒清洁机器人,其特征在于,所述主储液罐的底部设置有称重传感器,所述称重传感器与所述plc控制器电性连接。7.根据权利要求1所述的喷洒清洁机器人,其特征在于,所述视觉检测装置为单目视觉相机或双目视觉相机。8.根据权利要求1所述的喷洒清洁机器人,其特征在于,所述行走装置上设置有激光雷达,所述控制柜上还设置有触摸屏,所述激光雷达、触摸屏分别与所述pc机电性连接。9.一种喷洒清洁机器人的控制方法,应用于权利要求1
‑
8任一所述的喷洒清洁机器人,其特征在于,包括以下步骤:通过双目相机采集待清洁区域图像,pc机利用神经网络算法对待清洁区域图像进行目标识别和语义分割,获取待清洁物体相对于机器人所在的中心坐标位置;机器人基于slam技术,进行自主定位导航,向待清洁物体所在位置移动,同时,移动过程中,机械臂带动喷头组件摆动,对待清洁区域进行摆动喷雾清洁;移动到待清洁物体所在位置,控制喷洒清洁装置配合机械臂对待清洁物体进行定点喷洒清洁。10.根据权利要求9所述的喷洒清洁机器人的控制方法,其特征在于,所述控制喷洒清洁装置配合机械臂对待清洁物体进行定点喷洒清洁,具体包括:通过机械臂上设置的视觉检测装置获取待清洁物体的三维模型信息,以获得待清洁物体与机器人的相对位置信息;
对机械臂进行轨迹规划;根据轨迹规划进行定点喷洒清洁;重复以上过程直到清洁完毕。
技术总结
本发明公开了一种喷洒清洁机器人及其控制方法,机器人包括:机器人机身以及行走装置,机器人机身上设置有控制柜、监控摄像机、双目相机、机械臂以及喷洒清洁装置,喷洒清洁装置包括喷头组件以及空压机和主储液罐,空压机用于为喷头组件供气,主储液罐用于为喷头组件供液,喷头组件设置在机械臂上,机械臂上还设置有视觉检测装置;控制柜内设置有供电模块、PC机、PLC控制器、机械臂控制器,PC机分别与行走装置、双目相机、视觉检测装置、PLC控制器、机械臂控制器连接;PLC控制器与喷洒清洁装置电性连接。本发明由机械臂搭载喷头组件灵活调节喷洒位置,实现行走摆动喷雾清洁、定点喷雾清洁,并且气液混合提高了喷洒清洁效果。并且气液混合提高了喷洒清洁效果。并且气液混合提高了喷洒清洁效果。
技术研发人员:齐立哲 孙云权
受保护的技术使用者:复旦大学
技术研发日:2021.09.26
技术公布日:2021/11/24
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。