1.本发明涉及一种轮驱动型多自由度正交关节链式机器人,可实现管道外攀爬、管道内运动、窄缝间行进、翻越障碍物等多种运动模式,属于机器人技术领域。
背景技术:
2.随着科学技术的发展和时代的进步,机器人在越来越多的领域取代了人力,节约了人力成本并且加速了人类社会的发展与进步,特别是现在越来越多的机器人正代替人类在复杂多变的环境中执行危险的任务。由于多关节长链式机器人具有体型小巧、运动灵活等特点,故在探索、搜救等领域有着广泛的发展前景。专利【202011081427.0】提出了一种关节正交且由电机驱动的链式机器人,但其运动仅能依靠机器人表面的摩擦力,运动能力有限且磨损较大;专利【202010434268.1】提出了一种通过磁吸附在平整墙面运动的多关节爬壁机器人,但其对墙面平整性要求较高且仅有一个方向的对称性,若侧翻则无法继续工作;专利【202020592218.1】提出了一种主动双驱式蛇形机器人,但其关节只有一个方向,无法实现在墙缝内攀爬等运动。
技术实现要素:
3.针对现有技术的不足,本发明所要解决的技术问题是:提供一种轮驱动型多自由度正交关节链式机器人,在机器人的上下、左右两个方向均设有驱动轮,极大地增强了其运动能力和稳定性使得该机器人能实现管道外攀爬、管道内运动、窄缝间行进、翻越障碍物等不同模式的运动。
4.本发明解决所述技术问题的技术方案是:一种轮驱动型多自由度正交关节链式机器人,由多个单元首尾连接正交排布组成一条长链,使得主被动轮在上下、左右两个方向均匀排布,保证了运动的平稳可靠性。所述机器人的每个单元由关节驱动系统、主被动轮系两大部分组成;所述关节驱动系统为本机器人的主体部分,由关节电机、主舵盘u形连接件、副舵盘u形连接件、连接头组成,其中主舵盘u形连接件上端耳部与关节电机主舵盘联接,副舵盘u形连接件上端耳部通过固定在关节电机副舵盘的连接头与关节电机副舵盘相联接,主、副舵盘u形连接件主体部分与下一个单元的关节电机主体相连接,主、副舵盘u形连接件包围在关节电机两侧并且关于关节电机中轴面对称,构成一个圆柱面;所述主被动轮系固定在关节驱动系统中两关节电机间的空腔内,由电机壳、轮电机、挡片、主动轮轴、主动轮、从动轮组成;所述电机壳与挡片通过几何约束将轮电机固定在电机壳内,所述主动轮轴一端与轮电机主舵盘相联接,另一端与主动轮相联接,使得主动轮随轮电机主舵盘的转动而转动;所述从动轮内置有推力球轴承,通过长螺栓将其与电机壳相联接,使得主动轮、从动轮关于机器人中轴面相对称,稳定性良好。通过协调控制电机的转动,使得本轮驱动型多自由度正交关节链式机器人能实现管道外攀爬、管道内运动、窄缝间行进、翻越障碍物等不同模式的运动。
5.本发明的有益效果是结构简单稳固,易于组装、可靠性高、多个单元通过串联相连
接,易于控制、适应性好、运动能力强、功能多样,可根据不同条件执行相应的功能。
附图说明
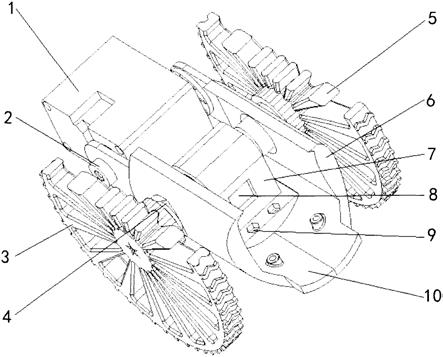
6.图1为本发明一种轮驱动型多自由度正交关节链式机器人一个单元的结构示意图。
7.图2为本发明一种轮驱动型多自由度正交关节链式机器人整体结构示意图。
8.图3为本发明一种轮驱动型多自由度正交关节链式机器人管道外攀爬运动示意图。
9.图4为本发明一种轮驱动型多自由度正交关节链式机器人攀爬台阶运动示意图。
10.图5为本发明一种轮驱动型多自由度正交关节链式机器人墙缝内运动示意图。
具体实施方式
11.下面结合实施例及其附图进一步叙述本发明:
12.本发明涉及的轮驱动型多自由度正交关节链式机器人(参见图1~2)由多个单元首尾连接正交排布,组成一条长链,所述机器人的每个单元由关节驱动系统、主被动轮系两大部分组成;所述关节驱动系统为本机器人的主体部分,由关节电机1、主舵盘u形连接件10、副舵盘u形连接件6、连接头2组成;所述主被动轮系由电机壳7、轮电机8、挡片9、主动轮轴4、主动轮3、从动轮5组成。
13.下面给出本发明具体实施例。具体实施例仅用于进一步说明本发明,不构成对本发明权利要求的限制。
14.实施例1:
15.本发明涉及的轮驱动型多自由度正交关节链式机器人上下、左右两个方向均安装有相同直径、不同方位的驱动轮系,使其具有很好的对称稳定性,当其在崎岖、颠簸路面运动侧倒时,机器人可不受影响,继续前进。
16.实施例2:
17.本发明涉及的轮驱动型多自由度正交关节链式机器人上下、左右两个方向均安装有驱动轮系,故运动性能很强,可实现在电线杆、树木等竖直柱体上沿螺旋线爬升、下降(参见图3),本机器人先利用底部轮运动前进靠近到目标柱体一侧,而后纵向电机作用,使机器人主体绕柱体一圈且侧轮抱紧柱体,随后在侧轮的转动下,机器人沿螺旋线向上爬升,由于本机器人的多冗余度结构,及其轮上设置的防滑纹路故可在爬升至合适高度处,机器人下端抱紧柱体起固定作用,而上端执行相应探索任务,反之,在需要下降时,只需使轮反转,本机器人即可沿原螺旋线下降。
18.实施例3:
19.本发明涉及的轮驱动型多自由度正交关节链式机器人上下、左右两个方向均安装有驱动轮系,运动性能良好,且由于其多冗余度的关节结构、体积小巧,故可以很好地在弯曲且管径不小于本机器人直径的管道中灵活运动,实现勘探勘测的功能。
20.实施例4:
21.本发明涉及的轮驱动型多自由度正交关节链式机器人由多个单元串联而成且上下、左右两个方向均安装有驱动轮系,运动灵活,可以很好地完成上台阶、攀爬高台等运动
(参见图4),在本机器人运动到台阶下时,在关节电机作用下,本机器人将先从第一节开始,逐节抬起成竖直状态,同时本机器人后部的主动轮开始运动,使得机器人前部靠近台阶壁;待本机器人前部第一节高度越过台阶高时,将从第一节开始逐节恢复水平状态,使其置于水平台阶上,同时在底部轮的驱动下向前运动,在台阶下的部分仍将逐渐抬起并靠近台阶壁;当台阶下部分完全抬起时,机器人前部将继续利用底部的驱动轮向前运动,位于台阶边缘的节将逐节恢复水平,直至机器人整体都位于台阶面上,当本机器人第一节接触到下一台阶时,又会重复以上步态,以完成上台阶、攀爬高台等运动。
22.实施例5:
23.本发明涉及的轮驱动型多自由度正交关节链式机器人上下、左右两个方向安装有相同直径、不同方位的驱动轮系,整体为多冗余度结构,运动性能良好,可在不平整的窄隙中灵活运动(参见图5),本机器人在窄缝底部时,前五节将整体抬起一定角度,而后在第六节关节电机的作用下,前四节将逐渐靠近一面墙体直至前四节的侧轮与墙体相接触;随后七至十一节也将整体抬起一定角度,而后在第十二节关节电机的作用下,七至十节将逐渐靠近另一面墙体,直至七至十节的侧轮与另一面墙体相接触;随后,通过控制第六节与第十二节关节电机使得前四节与七至十一节的侧轮分别紧靠两面墙壁,随后机器人从第十三节开始,重复前十二节步态,直至机器人整体靠紧在窄缝内。由于本机器人两个方向角度均可自由调节,故可在最小距离不小于本机器人最大宽度的窄缝内上下左右自由运动且不受墙体凹凸性、间距大小、窄缝角度变化的影响。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。