1.本发明涉及枪械设计制造领域,特别涉及了一种几何倍增加速二维多级双连杆杠杆枪。
背景技术:
2.传统枪射程近,只有使用几何倍增加速二维多级双连杆杠杆,并且在增加费力杠杆时不增加身体姿式长度才能达到加速目的。
技术实现要素:
3.本发明是为了快速,远程射击,特提供了一种几何倍增加速二维多级双连杆杠杆枪。
4.本发明提供了一种几何倍增加速二维多级双连杆杠杆枪,多级为2、3、4、5或更多级;多级杠杆纵向横向二维设置充分利用空间;每一级杠杆主体包括一个双连杆,每个双连杆里的两根相邻连杆平行排列;每个双连杆形状、大小一致,间距一致;每个双连杆中部与支架连接,支架左边部份的双连杆与左拐形件通过销轴连接成左几何倍增加速二维多级双连杆杠杆,支架右边部份的双连杆与右拐形件通过销轴连接成右几何倍增加速二维多级双连杆杠杆。第n 1级杠杆主体设置在第n级杠杆主体后侧,第n 1级杠杆主体通过拐形件与第n级杠杆主体连接;由前至后,最前端为第一级杠杆主体。所述的第一级杠杆主体的支架左右两边通过销轴连接设置拐杆把手;每个拐杆把手形状、大小一致,拐杆把手竖杆部份与支架平行。所述的拐形件左右两端竖杆与支架平行;所述的最后左右两个拐形件的横杆固定连接设置左传动拐杆、右传动拐杆;每个传动拐杆形状、大小一致,传动拐杆的竖杆部份与支架平行;传动拐杆的坚杆部份高于拐形件;传动拐杆由最后一级杠杆主体向前延伸至第一级杠杆主体,传动拐杆近射手端固定连接弹匣插座。
5.当几何倍增加速二维多级双连杆杠杆枪运行时,外力经拐杆把手先作用于第一级杠杆主体双连杆产生速度,该速度经第一级杠杆主体双连杆按杠杆比传给第一组拐形件,再经第一组拐形件传给第二级杠杆主体双连杆,再经第二级杠杆主体双连杆按杠杆比传给第二组拐形件,再经第二组拐形件传给第三级杠杆主体双连杆,再经第三级杠杆主体双连杆按杠杆比传给第三组拐形件,再经第三组拐形件传给第四级杠杆主体双连杆,再经第四级杠杆主体双连杆按杠杆比传给第四组拐形件,再经第四组拐形件传给第五级杠杆主体双连杆,再经第五级杠杆主体双连杆按杠杆比传给第五组拐形件,再经第五组拐形件传给第六级杠杆主体双连杆,再经第六级杠杆主体双连杆按杠杆比传给第六组拐形件,再经第六组拐形件传给第七级杠杆主体双连杆,再经第七级杠杆主体双连杆按杠杆比传给第七组拐形件,再经第七组拐形件传给第八级杠杆主体双连杆,再经第八级杠杆主体双连杆按杠杆比传给第八组拐形件,再经第八组拐形件传给传动拐杆,从而使速度几何倍增的带动左传动拐杆、左弹匣插座、左弹匣向前方加速使子弹从左弹匣插座出弹口发射,带动右传动拐杆、右弹匣插座、右弹匣向前方加速使子弹从右弹匣插座出弹口发射。
6.当左几何倍增加速二维多级双连杆杠杆平行支架向目标方运动时,带动右几何倍增加速二维多级双连杆杠杆平行支架向射手方运动;当右几何倍增加速二维多级双连杆杠杆平行支架向目标方运动时,带动左几何倍增加速二维多级双连杆杠杆平行支架向射手方运动。
7.当用手推拐杆把手时,会带动几何倍增加速二维多级双连杆杠杆平行支架作运动。手推拐杆把手到最远点时,换另一只手推拐杆把手运动,周而往复运动射击。
8.传统枪射程近。本发明的几何倍增加速二维多级双连杆杠杆加速倍数则为几何倍增,实现远程射击。
9.传动拐杆传动,结构更加结实。
10.本发明的优点:
11.本发明所述的几何倍增加速二维多级双连杆杠杆枪结构耐用,射程远,快速。
附图说明
12.下面结合附图及实施方式对本发明作进一步祥细说明。
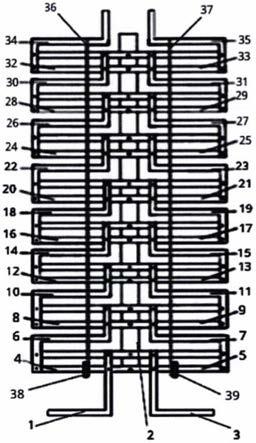
13.图1为几何倍增加速二维八级双连杆杠杆枪结构示意图;
14.图2为几何倍增加速二维八级双连杆杠杆枪侧视图;
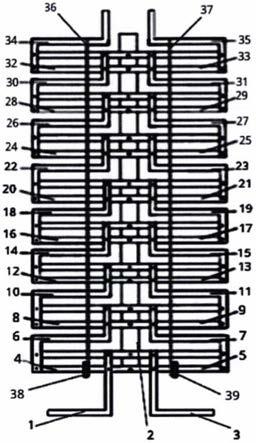
15.图3为几何倍增加速二维七级双连杆杠杆枪结构示意图;
16.图4为左弹匣插座出弹口结构示意图;
17.图5为右弹匣插座出弹口结构示意图;
18.图6为左弹匣结构示意图。
具体实施方式
19.实施例一
20.本实施例提供了一种几何倍增加速二维八级双连杆杠杆枪,其特征在于:所述的几何倍增加速二维八级双连杆杠杆枪,包括左拐杆把手1,支架2,右拐杆把手3,左第一级杠杆主体双连杆4,右第一级杠杆主体双连杆5,左第一个拐形件6,右第一个拐形件7,左第二级杠杆主体双连杆8,右第二级杠杆主体双连杆9,左第二个拐形件10,右第二个拐形件11,左第三级杠杆主体双连杆12,右第三级杠杆主体双连杆13,左第三个拐形件14,右第三个拐形件15,左第四级杠杆主体双连杆16,右第四级杠杆主体双连杆17,左第四个拐形件18,右第四个拐形件19,左第五级杠杆主体双连杆20,右第五级杠杆主体双连杆21,左第五个拐形件22,右第五个拐形件23,左第六级杠杆主体双连杆24,右第六级杠杆主体双连杆25,左第六个拐形件26,右第六个拐形件27,左第七级杠杆主体双连杆28,右第七级杠杆主体双连杆29,左第七个拐形件30,右第七个拐形件31,左第八级杠杆主体双连杆32,右第八级杠杆主体双连杆33,左第八个拐形件34,右第八个拐形件35,左传动拐杆36,右传动拐杆37,左弹匣插座38,右弹匣插座39,左弹匣40,右弹匣41,左弹匣插座出弹口42,右弹匣插座出弹口43及若干销轴。所述的第一级杠杆主体的支架左右两边部份通过销轴连接左右拐杆把手1、3,所述的拐形件6、7、10、11、14、15、18、19、22、23、26、27、30、31、34、35左右两端竖杆与支架2平行。拐杆把手1、3的竖杆与支架2平行。所述的支架2,拐杆把手1、3,拐形件6、7、10、11、14、15、18、19、22、23、26、27、30、31、34、35与每一级双连杆通过销轴连接。当几何倍增加速二维
八级双连杆杠杆运行时,外力经拐杆把手先作用于第一级杠杆主体双连杆4、5产生速度,该速度经第一级杠杆主体双连杆4、5按杠杆比传给拐形件6、7,再经拐形件6、7传给第二级杠杆主体双连杆8、9,再经第二级杠杆主体双连杆8、9按杠杆比传给拐形件10、11,再经拐形件10、11传给第三级杠杆主体双连杆12、13,再经第三级杠杆主体双连杆12、13按杠杆比传给拐形件14、15,再经拐形件14、15传给第四级杠杆主体双连杆16、17,再经第四级杠杆主体双连杆16、17按杠杆比传给拐形件18、19,再经拐形件18、19传给第五级杠杆主体双连杆20、21,再经第五级杠杆主体双连杆20、21按杠杆比传给拐形件22、23,再经拐形件22、23传给第六级杠杆主体双连杆24、25,再经第六级杠杆主体双连杆24、25按杠杆比传给拐形件26、27,再经拐形件26、27传给第七级杠杆主体双连杆28、29,再经第七级杠杆主体双连杆28、29按杠杆比传给拐形件30、31,再经拐形件30、31传给第八级杠杆主体双连杆32、33,再经第八级杠杆主体双连杆32、33按杠杆比传给拐形件34、35,从而使速度几何倍增的带动左传动拐杆36、左弹匣插座38、左弹匣40向目标方加速使左弹匣40内子弹从左弹匣插座子弹出口42发射,带动右传动拐杆37、右弹匣插座39、右弹匣41向目标方加速使右弹匣41内子弹从右弹匣插座子弹出口43发射。
21.当左几何倍增加速二维八级双连杆杠杆平行支架向目标方运动时,带动右几何倍增加速二维八级双连杆杠杆平行支架向射手方运动;当右几何倍增加速二维八级双连杆杠杆平行支架向目标方运动时,带动左几何倍增加速二维八级双连杆杠杆平行支架向射手方运动。
22.当用手推动拐杆把手时,会带动几何倍增加速二维八级双连杆杠杆平行支架运动。手推动拐杆把手到最远点时,换另一只手推动拐杆把手,周而往复运动射击。
23.传统枪射程近。本发明的几何倍增加速二维八级双连杆杠杆枪加速倍数则为几何倍增。
24.传动拐杆传动,结构更加结实。
25.实施例二
26.实施例一的几何倍增加速二维八级双连杆杠杆枪可缩至几何倍增加速二维七级双连杆杠杆枪,如图2所示,其结构、功能及原理类似实施例一。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。