1.本发明涉及医疗器械技术领域,特别涉及一种胶囊内窥镜。
背景技术:
2.胶囊内窥镜已经被广泛用于消化道检查中,它利用内部电池供电,依靠摄像模块完成消化道图片的拍摄,并通过无线信号传出体外。通常,胶囊内窥镜的总检查时间在8~16小时,但电池电量支持可拍摄图片总数量通常不超过10万。因此,平均图片拍摄帧率不足4fps(frame per second)。于是会导致两个问题:
3.1.拍照帧率不足,存在漏拍的风险。拍摄帧率越高,视频图像越流畅,漏拍概率越低。胶囊在消化道内被动地随消化道蠕动而运动,时快时慢,对于有些区域,如十二指肠等,胶囊通过速度较快,此时如果拍摄帧率不够,将很容易导致漏拍。
4.2.重复图像较多,医生阅片效率低。虽然有些区域的通过速度很快,但是大部分情况下,胶囊在消化道内运动十分缓慢。因此,保持一定的帧率拍摄将获得非常多冗余图像,造成阅片的负担加大。
5.为解决上述两个问题,需要胶囊内窥镜智能地调整拍摄帧率,在有限的电量供应下,减少漏拍和重复图像的数量。目前的解决方案为根据胶囊的实际运动状态自动调整其拍摄帧率,做到当胶囊相对人体静止或缓慢运动时,降低拍摄帧率,减少冗余图片的获取,节省电量;而当胶囊相对人体运动剧烈时,提高拍照帧率,减少漏拍。
6.为实现上述方案,现有技术一般采用有源传感器(如加速度传感器、陀螺仪、图像传感器等)检查胶囊的实际运动状态,但是,由于有源传感器自身耗电,因此增加胶囊内窥镜运行时的功耗。另外,使用这类传感器(有源传感器)可能存在计算误差、设计复杂、或计算复杂等问题。
技术实现要素:
7.本发明的目的在于提供一种胶囊内窥镜。
8.为实现上述发明目的之一,本发明一实施方式提供一种胶囊内窥镜,包括透明前壳、镂空后壳和隔水板,所述隔水板设置在所述透明前壳和镂空后壳之间,其中:
9.所述隔水板和透明前壳合围成密封的第一腔体,所述第一腔体内设置有摄像模块、计算与控制模块、信号传输模块,所述信号传输模块将所述隔水板与所述计算与控制模块相连接;
10.所述隔水板和所述镂空后壳合围形成第二腔体,所述第二腔体内设置有与所述隔水板相连接的流速传感器,所述流速传感器采集到的流速信号通过所述隔水板和信号传输模块传输给所述计算与控制模块,所述计算与控制模块将所述流速信号转换成帧率控制信号控制所述摄像模块拍照的帧率。
11.作为本发明一实施方式的进一步改进,所述流速传感器由多个长条状的传感单元组成,每个所述传感单元竖直地设置在所述隔水板上,当有流体通过时,所述传感单元会随
着流体运动而发生形变,并将所述形变转换为电信号后由所述隔水板传递给所述信号传输模块。
12.作为本发明一实施方式的进一步改进,所述传感单元为压电式传感单元。
13.作为本发明一实施方式的进一步改进,所述传感单元为表面贴附有压电材料的柱状体,所述压电材料发生形变时会产生电压信号。
14.作为本发明一实施方式的进一步改进,所述流速传感器包括有n个传感单元,所述n个传感单元采集的流速信号为随时间变化的流速矢量v(t,i)=[vx(t,i),vy(t,i)],其中,所述vx为所述流速矢量在x方向的速度大小,vy为所述流速矢量在y方向的速度大小,所述x方向与所述y方向垂直,t表示时刻,i表示传感单元的序号。
[0015]
作为本发明一实施方式的进一步改进,所述计算与控制模块还用于对所述n个传感单元采集的流速矢量进行积分,每个传感单元得到积分时长t时间段内的平均流速矢量u(t,i):
[0016][0017]
作为本发明一实施方式的进一步改进,将所述n个传感单元的流速矢量排列成矩阵,所述计算与控制模块还用于对所述n个传感单元采集的流速矢量进行卷积,每个传感单元基于r*r的卷积核f进行卷积,得到h(m,n,t):
[0018]
h(m,n,t)=v(t,i(m,n))*f;
[0019]
其中,m和n分别表示所述矩阵的行号和列号,i(m,n)表示第m行第n列的传感单元。
[0020]
作为本发明一实施方式的进一步改进,所述计算与控制模块还用于计算所述n个传感单元的流速矢量的综合方向和综合大小k(t),根据所述综合方向计算综合帧率权重w(t),并根据所述k(t)和w(t)计算帧率控制信号m(t):
[0021]
m(t)=k(t)*w(t);
[0022]
其中,所述帧率控制信号m(t)用于控制所述摄像模块拍照的帧率,每个基础运动方向都对应有预设帧率权重,所述w(t)为所述综合方向在每个基础运动方向上的帧率权重之和。
[0023]
作为本发明一实施方式的进一步改进,所述计算与控制模块还用于计算所述k(t):
[0024][0025]
作为本发明一实施方式的进一步改进,所述计算与控制模块还用于计算所述w(t):
[0026][0027]
其中,p为基础运动方向的个数,w(j)为第j个基础运动方向预设帧率权重,s(j)为所述综合方向与第j个基础运动方向的相似度。
[0028]
与现有技术相比,本发明的胶囊内窥镜,使用流速传感器来检测胶囊内窥镜与消化道的相对运动,从而控制胶囊内窥镜的拍摄帧率,所述胶囊内窥镜具有结构简单、计算方法简单且误差小的优势,并且由于使用的是无源传感器,传感器本身不消耗电量,因此更加节能。
附图说明
[0029]
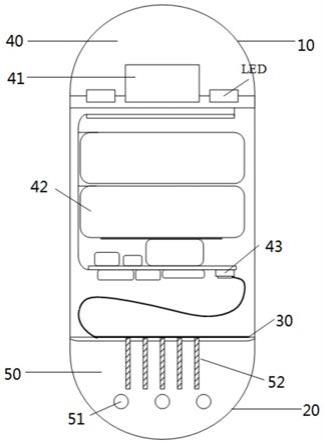
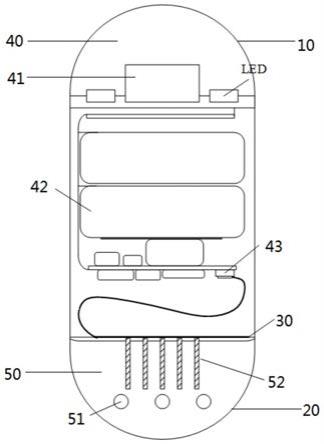
图1是本发明的胶囊内窥镜的结构示意图。
[0030]
图2是本发明的流速传感器的一具体实施方式。
[0031]
图3是本发明通过压电传感单元检测流体信号的原理示意图。
[0032]
图4是本发明对一具体实施方式的流速矢量矩阵进行卷积的示意图。
[0033]
其中,10、透明前壳;20、镂空后壳;30、隔水板;40、第一腔体;41、摄像模块;42、计算与控制模块;43、信号传输模块;50、第二腔体;51、通孔;52、流速传感器;521、传感单元。
具体实施方式
[0034]
以下将结合附图所示的具体实施方式对本发明进行详细描述。但这些实施方式并不限制本发明,本领域的普通技术人员根据这些实施方式所做出的结构、方法、或功能上的变换均包含在本发明的保护范围内。
[0035]
本发明提供一种胶囊内窥镜,胶囊内窥镜使用流速传感器来检测胶囊内窥镜与消化道的相对运动,从而控制胶囊内窥镜的拍摄帧率。胶囊内窥镜具有结构简单、计算方法简单且误差小的优势,并且,由于使用的是无源传感器,传感器本身不消耗电量,因此更加节能。
[0036]
如图1所示,本发明的胶囊内窥镜包括透明前壳10、镂空后壳20和隔水板30,隔水板30设置在透明前壳10和镂空后壳20之间。
[0037]
隔水板30和透明前壳10合围成密封的第一腔体40,第一腔体40内设置有摄像模块41、计算与控制模块42、信号传输模块43,信号传输模块43将隔水板30与计算与控制模块42相连接。
[0038]
隔水板30和镂空后壳20合围形成第二腔体50,第二腔体50内设置有与隔水板30相连接的流速传感器52,流速传感器52采集到的流速信号通过隔水板30和信号传输模块43传输给计算与控制模块42,计算与控制模块42将流速信号转换成帧率控制信号控制摄像模块41拍照的帧率。
[0039]
需要说明的是,隔水板30具有导电功能,即可以将流速传感器52采集到的流速信号传递给信号传输模块43。优选隔水板30为电路板。另外,第一腔体40内还包括有一些常用模块,例如无线通信模块、电池模块、照明模块等,这些模块涉及的技术为胶囊内窥镜的现有技术,此处不再赘述。
[0040]
如图1所示,镂空后壳20与隔水板30形成的第二腔体50,第二腔体50将流速传感器52包含在第二腔体50内,起到保护的作用。同时,镂空后壳20上存在很多通孔51,从而气体或液体可以通过通孔51进入第二腔体50,使流速传感器52可以测量流体流速的变化。这些通孔51还起到滤波的效果,即当外部有较高频率的流体扰动时,这些扰动不易通过镂空后壳20传导到第二腔体50内部,从而减小了流速测量的噪声。
[0041]
需要说明的是,流速传感器52可以只包含一个流速传感单元,但是为了提高测量的精度,优选包含多个流速传感单元。另外,流速传感器52可以是基于超声的,也可以是基于热分布的,还可以是基于形变的,本技术优选使用基于形变的流速传感器52。
[0042]
在一优选的实施方式中,流速传感器52由多个长条状的传感单元521组成,每个传感单元521竖直地设置在隔水板30上,如图2所示。当有流体通过时,传感单元521会随着流体运动而发生形变,并将形变转换为电信号后由隔水板30传递给信号传输模块43。
[0043]
传感单元521可以是压电式传感单元,也可以是压阻式传感单元,本发明优选其为压电式传感单元。
[0044]
进一步的,传感单元521为表面贴附有压电材料的柱状体,压电材料发生形变时会产生电压信号。
[0045]
具体的,以柱状“纤毛”式压电传感单元521为例,通过压电传感单元521检测流体信号的原理如图3所示。柱体的两个侧面ac用于检测一个方向的流体信号,另两个侧面bd用于检测其垂直方向的流体信号。在柱体的相邻两个侧面或者全部四个侧面都贴附有压电材料,这些压电材料发生形变的时候会产生电压信号输出,测量各压电材料电压的变化即可得知它们的形变量,从而得知流体信号的变化(即流体的流速变化以及方向变化)。如流体自ac方向流过,发生速度变化,导致“纤毛”向c方向弯曲,这时a、c两面的压电材料发生形变,从而导致输出电压变化。根据变化的电压值即可反推ac方向流体的流速变化和变化方向。
[0046]
需要说明的是,除压电材料本身性质会影响压电传感单元521的灵敏度外,柱体的长度和粗细也会影响流速信号测量的敏感度。由于镂空后壳20形成一个拱形的区域,因此,可以选用更细、更长的柱体形状的压电传感单元521作为流体信号探测单元,如柱体高1~3mm,宽度<1mm等,从而提高压电传感单元521的灵敏度。
[0047]
本发明的胶囊内窥镜使用压电传感单元521来直接检测胶囊内窥镜与消化道的相对运动,检测及计算方法简单,且结构简单。并且,由于压电传感单元521为无源传感单元,即传感器本身不消耗电量,因此更加节能。
[0048]
需要说明的是,可以直接根据检测出来的流体速度来控制摄像模块41的拍摄帧率,即流体速度越快,拍摄帧率越大。也可以基于流体信号的流体速度和流体方向,共同生成帧率控制信号,对拍摄帧率进行控制。
[0049]
在一个优选的实施方式中,流速传感器52包括有n个传感单元521,n个传感单元521采集的流速信号为随时间变化的流速矢量v(t,i)=[vx(t,i),vy(t,i)],其中,vx为流速矢量在x方向的速度大小,vy为流速矢量在y方向的速度大小,x方向与y方向垂直,t表示时刻,i表示传感单元521的序号。
[0050]
由于传感单元521检测的数据存在噪声或干扰,进一步的,为了测量的准确性,减少每个传感单元521检测的流速矢量在时间上的干扰(即这些干扰是时而出现时而消失的),计算与控制模块42还用于对n个传感单元521采集的流速矢量进行积分,每个传感单元521得到积分时长t时间段内的平均流速矢量u(t,i),从而过滤了积分时长t时间段内的干扰。u(t,i)为:
[0051][0052]
另外,为了测量的准确性,还可以减少这n个传感单元521检测到的流速矢量在空间上的干扰(即有一些传感单元521存在干扰,而一些不存在干扰),将n个传感单元521的流速矢量排列成矩阵v(t,i(m,n)),计算与控制模块42还用于对n个传感单元521采集的流速矢量进行卷积,每个传感单元521基于r*r的卷积核f进行卷积(r为大于1的正整数),得到h(m,n,t):
[0053]
h(m,n,t)=v(t,i(m,n))*f;
[0054]
其中,m和n分别表示矩阵的行号和列号,i(m,n)表示第m行第n列的传感单元521。
[0055]
具体的,如图4所示,假设n个传感单元521组成一个4
×
4矩阵(n=16),每个方格代表一个传感单元521,方格内的箭头表示流速矢量,箭头方向表示流速方向,箭头长度表示流速大小。每个时刻,每个传感单元521都能计算出一个流速矢量,从而形成一个矢量图h(m,n,t),其中,m,n分别表示在矢量图中的行号和列号,如第m行、第n列对应第i个传感单元521。f为一个3*3的卷积核,包含了9个元素,每个元素都有独立的值,如均为1/9。卷积时,让f与矩阵v(t,i(m,n))上同样大小的一块区域进行对应位置的相乘,然后相加,得到矢量图h(m,n,t)中对应位置的一个矢量。然后,让f在矩阵v(t,i(m,n))上平移一格或多格后,再进行同样的计算,直到遍历整个矩阵。对于矩阵边界的点,可以先进行向外的扩展,再进行卷积。最终得到卷积之后的矢量图h(m,n,t)。卷积计算是公知的常规算法,这里不再赘述。
[0056]
需要说明的是,可以只减少流速矢量在时间上的干扰,也可以只减少流速矢量在空间上的干扰,还可以两种过滤方式叠加进行,优选先对流速矢量过滤时间上的干扰,再过滤空间上的干扰,这样能够最大程度地提高测量的准确性。
[0057]
进一步的,计算与控制模块42还用于计算n个传感单元521的流速矢量的综合方向和综合大小k(t),根据综合方向计算综合帧率权重w(t),并根据k(t)和w(t)计算帧率控制信号m(t):
[0058]
m(t)=k(t)*w(t);
[0059]
其中,帧率控制信号m(t)用于控制摄像模块41拍照的帧率,每个基础运动方向都对应有预设帧率权重,w(t)为综合方向在每个基础运动方向上的帧率权重之和。基础运动方向包括向前运动、向后运动、向左运动和向右运动等。
[0060]
需要说明的是,不仅n个流速矢量的综合大小k(t)会影响拍摄帧率,其综合方向亦会对帧率有要求。例如,胶囊内窥镜在消化道内向前运动或者向后运动时,需要多拍摄一些消化道内的图像,即拍摄帧率相对要大些,而当胶囊内窥镜在消化道内左右摆动时,这时拍摄的图像意义不大,因此需要拍摄帧率相对小些。基于此,为每个基础运动方向设置相应的预设帧率权重,w(t)为综合方向在每个基础运动方向上的帧率权重之和。
[0061]
进一步的,计算与控制模块42还用于计算k(t),即n个传感单元521的流速矢量的流速大小的平均值:
[0062][0063]
进一步的,计算与控制模块42还用于计算综合帧率权重w(t):
[0064][0065]
其中,p为基础运动方向的个数,w(j)为第j个基础运动方向预设帧率权重,s(j)为综合方向与第j个基础运动方向的相似度。
[0066]
需要说明的是,综合方向的表现形式有多种,例如,可以通过以某一基础运动方向为基准方向,计算每个流速矢量与基准方向的夹角,然后得到平均夹角,其对应的方向即为综合方向,此时,其与各个基础运动方向的相似度由综合方向与各个基础运动方向的夹角大小决定,对夹角大小进行归一化处理即为最终综合方向与各个基础运动方向的相似度;综合方向还可以是类似图4的矩阵图,矩阵图的每个方格的箭头长度相等,箭头方向对应于n个流速矢量的方向,而对于每个基础运动方向都可以排列成同样大小的矩阵图,每个矩阵图中每个方格的箭头长度与综合方向对应的矩阵图的箭头长度相等,每个矩阵图中的每个方格的箭头方向为对应的基础运动方向,因此,可以通过计算综合方向对应的矩阵图与基础运动方向对应的矩阵图的图像相似度,然后进行归一化处理后,得到综合方向与每个基础运动方向的相似度。
[0067]
在一个具体的实施方式中,计算与控制模块42基于流体信号的流体速度和流体方向、共同生成帧率控制信号的方法的步骤包括:
[0068]
步骤s100:对n个流速矢量分别进行积分,得到在积分时长t时间段内的平均流速矢量u(t,i):
[0069][0070]
流速传感器52包括有n个传感单元521,n个传感单元521采集的流速信号为随时间变化的流速矢量v(t,i)=[vx(t,i),vy(t,i)],其中,vx为流速矢量在x方向的速度大小,vy为流速矢量在y方向的速度大小,x方向与y方向垂直,t表示时刻,i表示传感单元的序号。
[0071]
步骤s200:对步骤s100得到的n个平均流速矢量排列成矩阵u(t,i(m,n)),每个平均流速矢量基于卷积核f进行卷积,得到卷积后的矩阵h(m,n,t):
[0072]
h(m,n,t)=u(t,i(m,n))*f;
[0073]
其中,f为r*r的卷积核(r为大于1的正整数),m和n分别表示矩阵的行号和列号,i(m,n)表示第m行第n列的传感单元。
[0074]
步骤s300:根据步骤s200得到的矩阵h(m,n,t),计算其与每个基础运动方向的相似度,并对每个基础运动方向的预设帧率权重与对应的相似度进行加权求和,得到综合帧率权重w(t):
[0075][0076]
其中,p为基础运动方向的个数,w(j)为第j个基础运动方向预设帧率权重,s(j)为综合方向与第j个基础运动方向的相似度。
[0077]
步骤s400:根据步骤s200得到的矩阵h(m,n,t),计算矩阵h(m,n,t)的综合大小k
(t):
[0078][0079]
步骤s500:计算用于控制摄像模块41拍照频率的帧率控制信号m(t):
[0080]
m(t)=k(t)*w(t)。
[0081]
需要说明的是,步骤s300和s400顺序可以颠倒。
[0082]
计算与控制模块42基于流体信号的流体速度和流体方向、共同生成帧率控制信号的方法,具有计算精准、误差小且更合理的有益效果。
[0083]
应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施方式中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
[0084]
上文所列出的一系列的详细说明仅仅是针对本发明的可行性实施方式的具体说明,它们并非用以限制本发明的保护范围,凡未脱离本发明技艺精神所作的等效实施方式或变更均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。