1.本发明属于高精度测量技术领域,特指一种用于环形薄壁工件的双传感器测量系统以及测量方法。
背景技术:
2.环形薄壁工件是国防、航空、信息电子、光学系统中不可或缺的组件,环形薄壁工件的圆柱度、壁厚差、形貌误差等极大地影响了系统的性能。实现对环形薄壁工件壁面精确、稳定的测量,从而提高环形薄壁工件的加工精度是提高系统性能的重要手段。
3.在环形薄壁工件的单传感器测量系统中,旋转台的定位误差是重要的误差来源,旋转台的定位误差直接导致了环形薄壁工件内外壁测量数据的拼接误差,使测量数据不能准确地反映壁厚差。
4.且在双传感器测量系统中,待测工件的偏心与倾角误差、以及双传感器的测量光路的偏离,都直接导致了环形薄壁工件的测量误差,这种误差在精密测量系统中更为显著与关键。如何通过使用双传感器测量有效的抑制与分解环形薄壁工件的偏心和倾角误差、以及双传感器的测量光路的偏离,对于环形薄壁工件的精密测量有着更为重要的意义。
技术实现要素:
5.本发明的目的是提供一种结构简单、精度高的双传感器测量系统以及测量方法。
6.本发明的目的是这样实现的:
7.一种用于环形薄壁工件的双传感器测量系统,包括:
8.xy定位平台,具有x方向移动的x向驱动平台以及y方向移动的y向驱动平台;
9.旋转台,设置在xy定位平台上,用于z向旋转;
10.手调台,设置在旋转台上,且具有装夹环形薄壁工件的工件载具,用于微调环形薄壁工件的位置;
11.z向驱动平台,用于z方向移动;
12.两个传感器调节装置,安装在z向驱动平台上,用于调节距离传感器的位置;以及
13.两个距离传感器,安装在传感器调节装置上,且距离传感器的光路相互对齐,用于测量距离传感器到环形薄壁工件内外壁的距离。
14.优选地,所述距离传感器为色散共焦传感器。
15.优选地,还包括标准球,可安装在手调台上,用于两个距离传感器的光路对齐。
16.优选地,所述手调台包括用于x向移动的x向平移微调组件、用于y向移动的y向平移微调组件、用于绕x向旋转的x向倾角台以及用于绕y向旋转的y向倾角台。
17.优选地,所述传感器调节装置包括用于z向移动的z向平动微调组件、用于x向移动的x向平动微调组件、用于绕z向旋转的z向角度微调组件以及用于绕y向旋转的y向角度微调组件。
18.一种用于环形薄壁工件的双传感器测量方法,基于上述的用于环形薄壁工件的双
传感器测量系统,其包括以下步骤:
19.第一步:安装环形薄壁工件至工件载具;
20.第二步:移动xy定位平台,使环形薄壁工件移动至两个距离传感器的下方;移动z向驱动平台,使两个距离传感器移动至环形薄壁工件的水平截面a所在的薄壁处;
21.第三步:通过控制旋转台旋转和x向驱动平台平移测量环形薄壁工件,并记录距离传感器的读数,根据几何关系计算出环形薄壁工件在水平截面a处圆心相对于旋转台旋转轴线的偏心坐标o
a
(x
a
,y
a
,z
a
);
22.第四步:移动z向驱动平台,使两个距离传感器移动至环形薄壁工件的水平截面b所在的薄壁处;
23.第五步:通过控制旋转台旋转和x向驱动平台平移,测量环形薄壁工件,并记录距离传感器的读数,根据几何关系计算出环形薄壁工件在水平截面b处圆心相对于旋转台的旋转轴线的偏心坐标o
b
(x
b
,y
b
,z
b
);
24.第六步:根据水平截面a和水平截面b处圆心的偏心坐标,计算环形薄壁工件的中心轴在yz平面的倾角α以及在xz平面上的倾角β,公式如下:
[0025][0026]
第七步:根据倾角α和β,分别调节手调台绕x轴、y轴旋转的自由度,使得环形薄壁工件106的中心轴与旋转台的旋转轴线平行,实现测量环形薄壁工件的倾角调节。
[0027]
第八步:控制旋转台旋转和x向驱动平台平移测量环形薄壁工件,并记录色散共焦传感器读数,根据几何关系计算出环形薄壁工件在水平截面b处圆心相对于旋转轴线的偏心坐标为(x
b1
,y
b1
,z
b
);那么根据x
b1
和y
b1
调节手调台,可以消除x、y方向上的偏心距离,进而使环形薄壁工件的中心轴与旋转台的旋转轴线重合,实现对心。
[0028]
第九步:需要控制z定位平台平移和旋转台转动实现双位移传感器对环形薄壁工件的螺旋扫描测量。
[0029]
优选地,在测量环形薄壁工件之前,首先进行两个位移传感器的光路对齐操作:
[0030]
首先,将标准球安装在手调台上,通过移动x向驱动平台、y向驱动平台以及z向驱动平台,使标准球移动至两个位移传感器之间;
[0031]
其次,再通过调节传感器调节装置,使两个位移传感器的光路对准标准球的球心;
[0032]
最后,拆除标准球。
[0033]
本发明相比现有技术突出且有益的技术效果是:
[0034]
1、本发明通过两个距离传感器测量环形薄壁工件的中心线与旋转台转轴轴线之间的偏移距离以及偏移角度,并通过手调台消除,从而提高工件的测量精度。
[0035]
2、本发明使用双色散共焦传感器对环形薄壁工件的内外壁进行测量,能提高测量效率,并克服单传感器测量中内外壁测量数据的拼接误差,具有非常高的测量精度,适合高精度零件的测量。
[0036]
3、本发明通过手调台可以减小环形薄壁工件中心线与旋转台转轴轴线之间的倾
角至
±
0.1
°
,同时也可以减小环形薄壁工件中心线与旋转台转轴轴线之间的偏心至亚微米量级。
[0037]
4、本发明通过标准球以及传感器调节装置,可以减小双传感器测量光路的偏离至微米量级,有效提高了检测光路的对齐精度,进而提升了位移传感器的测量精度。
附图说明
[0038]
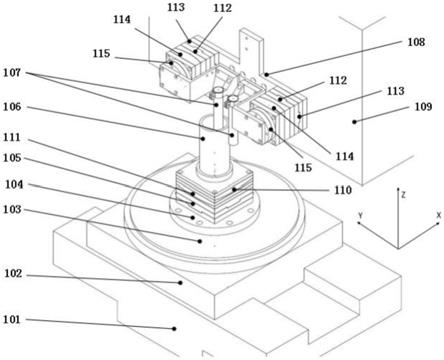
图1是本发明双传感器测量系统的结构示意图。
[0039]
图2是本发明双传感器光路对齐的结构示意图。
[0040]
图3是环形薄壁工件对心的原理示意图。
[0041]
图4是双位移传感器移动至环形薄壁工件的薄壁处的示意图。
[0042]
图5是双位移传感器对环形薄壁工件进行螺旋扫描测量的示意图。
[0043]
图中标号所表示的含义:
[0044]
101
‑
y向驱动机构;102
‑
x向驱动机构;103
‑
旋转台;104
‑
手调安装位;105
‑
手调台;106
‑
环形薄壁工件;107
‑
距离传感器;108
‑
传感器安装架;109
‑
z向驱动平台;110
‑
x向倾角台;111
‑
y向倾角台;112
‑
z向平动微调组件;113
‑
x向平动微调组件;114
‑
z向角度微调组件;115
‑
y向角度微调组件;116
‑
标准球。
具体实施方式
[0045]
下面结合具体实施例对本发明作进一步描述:
[0046]
如图1所示,一种用于环形薄壁工件的双传感器测量系统,包括xy定位平台、旋转台103、手调台105、z向驱动平台109、两个传感器调节装置以及两个距离传感器107。
[0047]
所述xy定位平台具有x方向移动的x向驱动平台102以及y方向移动的y向驱动平台101,主要用于环形薄壁工件的移动与定位。在xy定位平台上设置有用于z向旋转的旋转台103,所述旋转台103上设置有手调安装位104,手调安装位104安装有手调台105,手调台105上设置有装夹环形薄壁工件106的工件载具,所述手调台105用于微调环形薄壁工件106的位置,本实施例中,手调台105主要用于环形薄壁工件在x/y向的移动以及旋转调节。
[0048]
所述手调台105包括用于x向移动的x向平移微调组件、用于y向移动的y向平移微调组件、用于绕x向旋转的x向倾角台110以及用于绕y向旋转的y向倾角台111。当距离传感器107测量出环形薄壁工件中心轴与旋转台103的转轴轴线的偏移量时,该结构不仅可以通过x向平移微调组件消除x向偏移量、通过y向平移微调组件来消除y向的偏移量,还可以通过x向倾角台110和y向倾角台111来消除环形薄壁工件106所在的空间倾斜角度,适用于中心轴和底面不垂直的环形薄壁工件106,确保测量前环形薄壁工件106的中心轴是重合旋转台103的旋转轴线,以便于提高测量精度。
[0049]
在本实施例,所述手调安装位104为一固定在手调台105底部的安装板,安装板通过螺钉固定在所述旋转台103上。所述工件载具为一环形座,环形薄壁工件106的底部安装在所述环形座的内圈,并通过紧固件实现装夹。
[0050]
所述z向驱动平台109用于距离传感器107在z方向上移动与定位,其上通过传感器安装架108对称设置有两个用于调节距离传感器107位置的传感器调节装置,每个传感器调节装置上对应安装有一个距离传感器107。
[0051]
本实施例中,所述距离传感器107为色散共焦传感器,竖直设置在所述传感器调节装置,并具有90
°
出光的光源,且距离传感器107的光路相互对齐,用于测量距离传感器107到环形薄壁工件106内外壁的距离、以及测量环形薄壁工件106的面形、圆度、圆柱度等,其精度为nm级。
[0052]
具体地,所述z向驱动平台109上对称设置有用于调节距离传感器107位置的传感器调节装置,传感器调节装置包括用于z向移动的z向平动微调组件112、用于x向移动的x向平动微调组件113、用于绕z向旋转的z向角度微调组件114以及用于绕y向旋转的y向角度微调组件115。所述传感器调节装置可以调节距离传感器107在z/x向的位置以及z/y向的角度,方便距离传感器10的光路调节。
[0053]
本实施例还设置有标准球116,其直径8mm,加工精度为30nm,可拆卸安装在手调台105上。
[0054]
测量前,标准球116安装在手调台105上,通过调节x向驱动平台102、y向驱动平台101、z向驱动平台109调整标准球116的位置,以及通过传感器调节装置调整距离传感器107的光路位置,当距离传感器107的光路对准标准球116的球心时,光路即为对齐。光路对齐后,拆除标准球116即可。
[0055]
在本实施例中,x向驱动平台102、y向驱动平台101以及z向驱动平台109均包括伺服电机、丝杆传动结构以及滑台,伺服电机通过丝杆传动结构带动滑台做直线运动,一般其行程在1000mm以内,精度在μm级。
[0056]
x向平移微调组件、y向平移微调组件、z向平动微调组件112以及x向平动微调组件113的结构均与驱动平台结构类似,一般手动控制丝杆传动结构带动滑台做直线运动,其行程在mm级别,调节精度在μm级别。
[0057]
x向倾角台110、y向倾角台111、z向角度微调组件114以及y向角度微调组件115的结构均类似,均包括开设有弧形槽的安装座、设置有弧形底面的转动块以及微调组件,转动块通过微调组件转动设置在安装座上,使转动块可以绕着弧形槽的轴线转动,从而实现角度调节。所述角度调节范围在
±
10
°
,调节精度在0.01
°
。
[0058]
一种用于环形薄壁工件的双传感器测量方法,基于上述的用于环形薄壁工件的双传感器测量系统。
[0059]
在测量环形薄壁工件106之前,首先进行两个位移传感器107的光路对齐操作:
[0060]
首先,将标准球116安装在手调台105上,通过移动x向驱动平台102、y向驱动平台(101)以及z向驱动平台109,使标准球116移动至两个位移传感器之间。其次,调节传感器调节装置的y方向的自由度,使标准球116位于两个位移传感器的量程范围以内;再调节传感器调节装置的x、z方向的自由度,使两个位移传感器的光路对准标准球116的球心。如图2所示,实现两个位移传感器107的光路对齐,此时拆除标准球116。
[0061]
然后开始环形薄壁工件的对心与检测,其包括以下步骤:
[0062]
第一步:安装环形薄壁工件106至工件载具;
[0063]
第二步:移动xy定位平台,使环形薄壁工件106移动至两个距离传感器107的下方;再移动z向驱动平台109,使两个距离传感器107移动至底部环形薄壁工件106的水平截面a所在的薄壁处,如图3所示;
[0064]
第三步:通过控制旋转台103旋转和x向驱动平台102平移测量环形薄壁工件106,
并记录距离传感器107的读数,根据几何关系计算出环形薄壁工件106在水平截面a处圆心相对于旋转台103旋转轴线的偏心坐标o
a
(x
a
,y
a
,z
a
);
[0065]
第四步:移动z向驱动平台109,使两个距离传感器107移动至顶部环形薄壁工件106的水平截面b所在的薄壁处;
[0066]
第五步:通过控制旋转台103旋转和x向驱动平台102平移,测量环形薄壁工件106,并记录距离传感器107的读数,根据几何关系计算出环形薄壁工件106在水平截面b处圆心相对于旋转台103的旋转轴线的偏心坐标o
b
(x
b
,y
b
,z
b
);
[0067]
第六步:根据水平截面a和水平截面b处圆心的偏心坐标,计算环形薄壁工件106的中心轴在yz平面的倾角α以及在xz平面上的倾角β,公式如下:
[0068][0069]
第七步:根据倾角α和β,分别调节手调台105绕x轴、y轴旋转的自由度,使得环形薄壁工件106的中心轴与旋转台103的旋转轴线平行,实现测量环形薄壁工件106的倾角调节。
[0070]
第八步:控制旋转台103旋转和x向驱动平台102平移测量环形薄壁工件106,并记录色散共焦传感器108读数,根据几何关系计算出环形薄壁工件106在水平截面b处圆心相对于旋转轴线的偏心坐标为(x
b1
,y
b1
,z
b
);旋转台103的旋转轴线为x/y原点的参考系,那么根据x
b1
和y
b1
调节手调台105,可以消除x、y方向上的偏心距离,进而使环形薄壁工件106的中心轴与旋转台103的旋转轴线重合,实现对心。
[0071]
第九步:如图4所示,使双位移传感器移动至环形薄壁工件106的薄壁测量起始点;如图5所示,需要控制z定位平台110平移和旋转台103转动实现双位移传感器对环形薄壁工件106的螺旋扫描测量。
[0072]
上述实施例仅为本发明的较佳实施例,并非依此限制本发明的保护范围,故:凡依本发明的结构、形状、原理所做的等效变化,均应涵盖于本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。