技术特征:
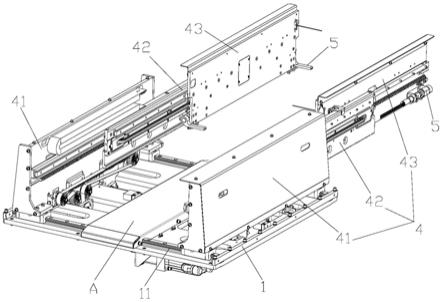
1.一种变距夹抱式货叉装置,其特征在于:包括基板(1)和设于基板(1)上的伸缩驱动机构(2)、变距驱动机构(3)、两个对称设置的伸缩叉机构(4),所述变距驱动机构(3)用于同时驱动两个伸缩叉机构(4)于基板(1)上左右相对移动、以将货物夹抱在两个伸缩叉机构(4)之间,所述伸缩驱动机构(2)用于同时驱动两个伸缩叉机构(4)于基板(1)上朝前伸出后缩回或缩回后继续朝后伸出、以带动夹抱的货物前后转移。2.根据权利要求1所述的变距夹抱式货叉装置,其特征在于:每个所述伸缩叉机构(4)均包括一个可左右滑动地限位安装于基板(1)上的下叉板(41);所述变距驱动机构(3)包括安装于基板(1)底面上的第一电机(31)和第一联轴器(32),所述第一联轴器(32)的两端均安装有一根丝杆(33)、且两根丝杆(33)圆周面上的螺纹方向相反,两根所述丝杆(33)上的丝杆螺母(34)分别对应与一块下叉板(41)固定连接,所述第一电机(31)驱动第一联轴器(32)旋转、以通过两根丝杆(33)和两个丝杆螺母(34)带动两块下叉板(41)于于基板(1)上作夹抱状的左右往复移动。3.根据权利要求2所述的变距夹抱式货叉装置,其特征在于:所述基板(1)顶面上设有两条以上的第一限位导轨(11),两个所述下叉板(41)均通过第一限位导轨(11)可左右滑动地限位安装于基板(1)上。4.根据权利要求2所述的变距夹抱式货叉装置,其特征在于:每个所述下叉板(41)上均限位安装有一个可前后伸缩移动的中叉板(42);每个所述下叉板(41)上还均设有一个驱动轮(411)和多个过渡轮(412),所述驱动轮(411)和多个过渡轮(412)上绕设有一条第二同步带(413),所述中叉板(42)承载于第二同步带(413)上、以通过第二同步带(413)带动中叉板(42)可于下叉板(41)上朝前伸出后缩回或缩回后继续朝后伸出;所述伸缩驱动机构(2)包括安装于基板(1)底面上的第二电机(21)和第二联轴器(22),第二联轴器(22)的两端均安装有一根传动轴(23),两个所述驱动轮(411)可沿传动轴(23)轴向滑动的限位套设于传动轴(23)上、以用于当伸缩驱动时使第二电机(21)通过两根传动轴(23)同时带动两个驱动轮(411)旋转/或者用于当变距驱动时使所述驱动轮(411)可于传动轴(23)上左右往复移动。5.根据权利要求4所述的变距夹抱式货叉装置,其特征在于:所述传动轴(23)的圆周面上沿轴向设有多条限位凸条(231),所述驱动轮(411)的轮心孔内设有多个和限位凸条(231)对应的限位凹槽(4111)、以使驱动轮(411)可轴向滑动的限位套设于传动轴(23)上。6.根据权利要求4所述的变距夹抱式货叉装置,其特征在于:所述下叉板(41)的内侧壁上设有第二限位导轨(414),所述中叉板(42)通过第二限位导轨(414)可前后滑动地限位安装于下叉板(41)上。7.根据权利要求4所述的变距夹抱式货叉装置,其特征在于:所述中叉板(42)和第二同步带(413)的接触面上均设有齿纹。8.根据权利要求4所述的变距夹抱式货叉装置,其特征在于:每个所述中叉板(42)上均限位安装有一个可前后伸缩移动的上叉板(43);每个所述中叉板(42)上还均设有一个环形齿链(421),每个所述下叉板(41)和上叉板(43)上分别对应设有一个与环形齿链(421)啮合的下齿条(415)和上齿条(431),当第二电机(21)驱动中叉板(42)于下叉板(41)上前后伸缩移动时、所述下齿条(415)使环形齿链(421)转动以通过上齿条(431)同步带动上叉板(43)作倍速前后伸缩移动。9.根据权利要求8所述的变距夹抱式货叉装置,其特征在于:所述中叉板(42)的内侧壁
上设有第三限位导轨,所述上叉板(43)通过第三限位导轨可前后滑动地限位安装于中叉板(42)上。10.根据权利要求1所述的变距夹抱式货叉装置,其特征在于:每个所述伸缩叉机构(4)的前端均安装有一个以上的拨指限位机构(5),所述拨指限位机构(5)包括安装于伸缩叉机构(4)上的第三电机(51),所述第三电机(51)的驱动轴端通过连接组件(52)安装有一个拨钩(53),当需要夹抱货物移动时所述第三电机(51)驱动拨钩(53)旋转翻出、用于使翻出的拨钩(53)对货物形成限位以便于带动货物移动。
技术总结
本发明公开了一种变距夹抱式货叉装置,包括基板和设于基板上的伸缩驱动机构、变距驱动机构、两个对称设置的伸缩叉机构,变距驱动机构用于同时驱动两个伸缩叉机构于基板上左右相对移动、以将货物夹抱在两个伸缩叉机构之间,伸缩驱动机构用于同时驱动两个伸缩叉机构于基板上朝前伸出后缩回或缩回后继续朝后伸出、以带动夹抱的货物前后转移。本发明具有结构简单紧凑、制作和运行方便快捷、重心低、适应性强、安全性高的优点。安全性高的优点。安全性高的优点。
技术研发人员:郭辉强 冷师红 吴乐 王凯锋
受保护的技术使用者:长沙华恒机器人系统有限公司
技术研发日:2021.07.08
技术公布日:2021/11/23
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。