1.本实用新型涉及激光加工技术领域,尤其涉及一种晶圆激光加工装置。
背景技术:
2.在高速电子元器件制备时,已逐渐采用低介电常数膜及铜质材料作为晶圆材料,但是这些晶圆难以使用普通的金刚石刀片进行切割加工。通常采用冷加工的激光开槽技术进行切割,具体地,将短脉冲激光聚焦到晶圆表面后进行照射,激光脉冲被低介质常数膜连续吸收,但吸收到一定程度的热能后,低介电常数膜会瞬间汽化,由于相互作用的原理,被汽化的物质会消耗掉晶片的热能,以此实现微热影响的冷加工。为提高生产效率,有效地防止因崩缺、表层脱落等不良因素造成的加工质量问题,更进一步地,通常采用短脉冲激光先在切割道内刻蚀,形成凹槽;然后再使用金刚石刀片在凹槽中间区域实施全切割加工,从而将晶圆切割成若干个小的晶粒。
3.目前,晶圆激光开槽工艺一般包含晶圆涂胶、晶圆激光开槽和晶圆清洗这三个工序,且晶圆进入激光开槽机后,将依次进行涂胶、开槽和清洗。显然,这样要有序地执行这些工序,必然会大面积铺开,故激光开槽机整体的占地面积较大,总体结构必然会比较复杂,不利于提升产能。
技术实现要素:
4.本实用新型实施例的目的在于提供一种晶圆激光加工装置,用于解决现有的晶圆激光开槽机占地面积大,结构较复杂不利提升产能的技术问题。
5.为了解决上述技术问题,采用了如下所述的技术方案:本实用新型实施例提供一种晶圆激光加工装置,该晶圆激光加工装置包括机架和安装在所述机架上的座体,所述晶圆激光加工装置还包括安装在所述座体上的运动平台、激光加工组件和料盒升降机构,所述晶圆激光加工装置还包括安装在所述机架上的校正机构、支撑机构、涂胶清洗装置、多轴机器人和缓存装置;
6.所述运动平台具有上下料工位和加工工位,用于使晶圆在上下料工位和加工工位上转运;
7.所述激光加工组件位于所述晶圆激光加工装置的靠近操作员的一侧上,用于对所述运动平台的加工工位上的晶圆进行激光加工;
8.所述料盒升降机构侧向位于所述激光加工组件和料盒初始位置之间,用于在料盒初始位置和所述校正机构的校正工位之间传送晶圆;
9.所述校正机构位于料盒初始位置的周边,并位于所述涂胶清洗装置和料盒初始位置之间;
10.于朝向操作员正面的方向上,所述支撑机构、所述涂胶清洗装置和料盒初始位置依次并排设置;所述涂胶清洗装置能与所述校正机构和所述支撑机构交接晶圆,用于对晶圆进行涂胶和清洗;
11.所述多轴机器人设置于加工工位和所述涂胶清洗装置之间的位置上;所述多轴机器人的机械臂的活动范围包括所述校正机构、所述支撑机构、所述缓存装置、所述运动平台的上下料工位所在的位置;
12.所述缓存装置位于所述多轴机器人、涂胶清洗装置、加工工位之间围合的区域内。
13.在一些实施例中,所述涂胶清洗装置包括涂胶装置和清洗装置,所述涂胶装置用于对晶圆进行涂胶,所述清洗装置用于对晶圆进行清洗;于朝向操作员正面的方向上,所述支撑机构、所述涂胶装置、所述清洗装置和料盒初始位置依次并排设置;
14.或者,于朝向操作员正面的方向上,所述支撑机构、所述清洗装置、所述涂胶装置和料盒初始位置依次并排设置。
15.或者,在另一些实施例中,所述涂胶清洗装置包括涂胶装置和清洗装置,所述涂胶装置和所述清洗装置均能与所述支撑机构和校正机构交接晶圆,并均用于对晶圆进行涂胶和清洗;于朝向操作员正面的方向上,所述涂胶装置和所述清洗装置在所述支撑机构和料盒初始位置之间并排设置。
16.在一些实施例中,所述晶圆激光加工装置还包括安装在所述机架上的传输机构,所述传输机构位于所述缓存装置、涂胶清洗装置和运动平台之间围合的区域内,所述传输机构用于将料盒中的晶圆传输至所述校正机构的校正工位上。
17.在一些实施例中,所述激光加工组件包括激光器光路组件和视觉机构,所述激光器光路组件位于所述运动平台和料盒升降机构之间围合的区域内,并位于所述晶圆激光加工装置的靠近操作员的一侧上;所述视觉机构位于所述激光器光路组件和所述运动平台之间的位置上。
18.在一些实施例中,所述座体为大理石座体。
19.在一些实施例中,所述运动平台为三维运动平台。
20.在一些实施例中,所述缓存装置为缓存台。
21.在一些实施例中,所述多轴机器人为六轴机器人。
22.或者,在另一些实施例中,所述多轴机器人为四轴机器人。
23.与现有技术相比,本实用新型实施例提供的晶圆激光加工装置主要有以下有益效果:
24.该晶圆激光加工装置通过采用多轴机器人,并将多轴机器人设置在机架上,将运动平台、激光加工组件和料盒升降机构安装在座体上,且将运动平台、激光加工组件、料盒升降机构、校正机构、支撑机构、涂胶清洗装置、多轴机器人和缓存装置等零部件围绕多轴机器人设置,并根据该晶圆激光加工装置的工作流程合理排布各自的位置,整体上确保了该晶圆激光加工装置的结构比较简单紧凑,以及搬运速度得到提升,利于提高生产效率和产能。
附图说明
25.为了更清楚地说明本实用新型中的方案,下面将对实施例描述中所需要使用的附图作一个简单介绍,显而易见地,下面描述中的附图是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。其中:
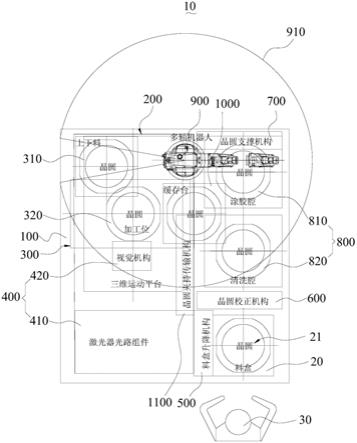
26.图1是本实用新型一个实施例中晶圆激光加工装置中各零部件的平面位置简图;
27.图2是本实用新型一个实施例中晶圆激光加工装置的平面结构示意图,其中,多轴机器人为六轴机器人。
28.附图中的标号如下:
29.10、晶圆激光加工装置;20、料盒;21、料盒初始位置;30、操作员;
30.100、机架;200、座体;
31.300、运动平台;310、上下料工位;320、加工工位;400、激光加工组件;410、激光器光路组件;420、视觉机构;500、料盒升降机构;
32.600、校正机构;700、支撑机构;800、涂胶清洗装置;810、涂胶装置;820、清洗装置;900、多轴机器人;910、活动范围;1000、缓存装置;1100、传输机构。
具体实施方式
33.除非另有定义,本文所使用的所有技术和科学术语与属于本实用新型技术领域的技术人员通常理解的含义相同;本文在说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本实用新型,例如,术语“长度”、“宽度”、“上”、“下”、“左”、“右”、“前”、“后”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置为基于附图所示的方位或位置,仅是便于描述,不能理解为对本技术方案的限制。
34.本实用新型的说明书和权利要求书及上述附图说明中的术语“包括”和“具有”以及它们的任何变形,意图在于覆盖不排他的包含;本实用新型的说明书和权利要求书或上述附图中的术语“第一”、“第二”等是用于区别不同对象,而不是用于描述特定顺序。“多个”的含义是两个或两个以上,除非另有明确具体的限定。
35.本实用新型的说明书和权利要求书及上述附图说明中,当元件被称为“固定于”或“安装于”或“设置于”或“连接于”另一个元件上,它可以是直接或间接位于该另一个元件上。例如,当一个元件被称为“连接于”另一个元件上,它可以是直接或间接连接到该另一个元件上。
36.此外,在本文中提及“实施例”意味着,结合实施例描述的特定特征、结构或特性可以包含在本实用新型的至少一个实施例中。在说明书中的各个位置出现该短语并不一定均是指相同的实施例,也不是与其它实施例互斥的独立的或备选的实施例。本领域技术人员显式地和隐式地理解的是,本文所描述的实施例可以与其它实施例相结合。
37.需说明的是,该晶圆激光加工装置10不仅可以对晶圆进行涂胶、开槽和清洗等操作,还可以同时对三片晶圆分别进行涂胶、开槽和清洗操作。另外,实际上,该晶圆激光加工装置10不仅用于对晶圆进行激光加工,还可以对其它合适的产品进行加工。
38.本实用新型实施例提供一种晶圆激光加工装置10,如图1和图2所示,该晶圆激光加工装置10包括机架100和安装在机架100上的座体200,晶圆激光加工装置10还包括安装在座体200上的运动平台300、激光加工组件400和料盒升降机构500。因运动平台300、激光加工组件400等均属于比较精密的仪器,具体在本实施例中,为提高整体的稳定性,座体200为大理石座体200,也即,该座体200采用大理石材料制成。
39.再如图1和图2所示,晶圆激光加工装置10还包括安装在机架100上的校正机构600、支撑机构700、涂胶清洗装置800、多轴机器人900和缓存装置1000。可以理解地,将多轴
机器人900安装在机架100上,而不是如现有的安装在机罩上,一方面能确保多轴机器人900的重心更低,另一方面能确保多轴机器人900和机架100同频振动,也即,能尽量与机架100保持相对静止,故此,在搬运晶圆的过程中,可以确保晶圆的稳定性更好,进而利于提升整个晶圆激光加工装置10的稳定性。
40.如图1所示,运动平台300具有上下料工位310和加工工位320,其中,该运动平台300主要用于使晶圆在上下料工位310和加工工位320上转运。换言之,运动平台300主要用于将涂胶完成的晶圆从上下料工位310搬运到加工工位320上以供激光加工组件400进行激光加工,还用于将激光加工组件400加工好的晶圆从加工工位320上搬运到上下料工位310上,以便送回料盘中。具体在本实施例中,运动平台300优选为三维运动平台300,这样,利于提高整体的搬运速度,从而有效地提高晶圆激光加工装置10的加工效率,也即产能。
41.如图1和图2所示,激光加工组件400位于晶圆激光加工装置10的靠近操作员30的一侧上,这样,方便操作人员观察具体的加工情况。其中,激光加工组件400通常主要用于对运动平台300的加工工位320上的晶圆(在本实施例中,该晶圆通常为涂胶后的晶圆)进行激光加工。
42.再如图1和图2所示,在晶圆激光加工装置10的前侧,料盒升降机构500位于激光加工组件400和料盒初始位置21之间,且料盒升降机构500侧向设置,也即不是面向操作员30设置,而是面向料盒20。其中,该料盒升降机构500主要用于在料盒初始位置21和校正机构600的校正工位(图未示)之间传送晶圆。可以理解地,料盒初始位置21和校正机构600的校正工位通常有一定的高度差,为确保晶圆被输送到晶圆激光加工装置10的工作台面上,通常需要料盒升降机构500带动料盒20内的晶圆上升到校正工位上,然后下降回到料盒升降机构500的初始位置待命。
43.再如图1和图2所示,为使料盒20内的晶圆尽快得到校正后进入到涂胶工序,校正机构600位于料盒初始位置21的周边,并位于涂胶清洗装置800和料盒初始位置21之间。再如图1所示,于朝向操作员30正面的方向上,支撑机构700、涂胶清洗装置800、校正机构600和料盒初始位置21依次并排设置。其中,在本实施例中,涂胶清洗装置800能与校正机构600和支撑机构700交接晶圆,用于对晶圆进行涂胶和清洗。具体地,涂胶清洗装置800与支撑机构700交接晶圆后,可以对晶圆进行涂胶;对应地,涂胶清洗装置800与校正机构600交接晶圆后,可以对涂胶和激光加工后的晶圆进行清洗。
44.再如图1和图2所示,为使晶圆激光加工装置10的结构更加紧凑,多轴机器人900设置于加工工位320和涂胶清洗装置800之间的位置上,且多轴机器人900的机械臂的活动范围910(也即图1中虚线所圈的范围)包括校正机构600、支撑机构700、缓存装置1000、运动平台300的上下料工位310所在的位置。另外,缓存装置1000位于多轴机器人900、涂胶清洗装置800、加工工位320之间围合的区域内。具体在本实施例中,缓存装置1000为缓存台。
45.可以理解地,通过采用多轴机器人900,因为其安装的占用面积小,但多轴机器人900的机械臂的活动范围910大,且搬运速度快,故此,非常利于确保整体的结构简单紧凑,也利于提高搬运速度。
46.需说明的是,多轴机器人900可以为四轴机器人,具体在本实施例中,多轴机器人900可以为六轴机器人。其中,多轴机器人900为六轴机器人时比为四轴机器人时,晶圆激光加工装置10的整体结构可以更加紧凑。
47.还需说明的是,具体在本实施例中,多轴机器人900可以用于从校正机构600上取出待加工晶圆,并将取得的晶圆搬运到支撑机构700上,以便涂胶清洗装置800对晶圆进行涂胶;多轴机器人900还可以用于从支撑机构700上取出完成涂胶后的晶圆,并将取得的晶圆搬运到缓存装置1000上;多轴机器人900还可以用于将缓存装置1000上的晶圆搬运到运动平台300的上下料工位310上;多轴机器人900还可以用于从运动平台300的上下料工位310上取得激光加工后的晶圆,并将该晶圆搬运至校正机构600上,以便涂胶清洗装置800对加工完成的晶圆进行清洗。
48.综上,相比现有技术,该晶圆激光加工装置10至少具有以下有益效果:该晶圆激光加工装置10通过采用多轴机器人900,并将多轴机器人900设置在机架100上,将运动平台300、激光加工组件400和料盒升降机构500安装在座体200上,且将运动平台300、激光加工组件400、料盒升降机构500、校正机构600、支撑机构700、涂胶清洗装置800、多轴机器人900和缓存装置1000等零部件围绕多轴机器人900,并根据该晶圆激光加工装置10的工作流程合理排布各自的位置,整体上确保了该晶圆激光加工装置10的结构比较简单紧凑,以及搬运速度得到提升,利于提高生产效率和产能。
49.为了使本技术领域的人员更好地理解本实用新型方案,下面将结合附图1和图2,对本实用新型实施例中的技术方案进行清楚、完整地描述。
50.在一些实施例中,如图1和图2所示,为实现涂胶清洗装置800既能涂胶,又能清洗,涂胶清洗装置800包括涂胶装置810和清洗装置820,其中,涂胶装置810可以用于对晶圆进行涂胶,对应地,清洗装置820可以用于对晶圆进行清洗。于朝向操作员30正面的方向上,支撑机构700、涂胶装置810、清洗装置820和料盒初始位置21依次并排设置。或者,于朝向操作员30正面的方向上,支撑机构700、清洗装置820、涂胶装置810和料盒初始位置21依次并排设置。也即,涂胶装置810和清洗装置820的位置可以根据具体情况互换,只是位置互换后,晶圆自动化生产流程会相应发生些变化,但最终达到的效果非常相近。
51.或者,在另一些实施例中,如图1和图2所示,为实现涂胶清洗装置800既能涂胶,又能清洗,且进一步提高整体的生产效率,涂胶清洗装置800包括涂胶装置810和清洗装置820,其中,涂胶装置810和清洗装置820均能与支撑机构700和校正机构600交接晶圆,并均用于对晶圆进行涂胶和清洗。具体地,涂胶装置810能与支撑机构700交接晶圆,以对晶圆进行涂胶,涂胶装置810还能与校正机构600交接,以对涂胶且开槽后的晶圆进行清洗。同理,清洗装置820也一样。需说明的是,晶圆的交接结构可采用常规的交接结构,也可以采用自创结构,因其不是本技术的保护点,故不赘述。
52.再如图1和图2所示,于朝向操作员30正面的方向上,涂胶装置810和清洗装置820在支撑机构700和料盒初始位置21之间并排设置。可以理解地,在支撑机构700和料盒初始位置21之间,涂胶装置810和清洗装置820的位置可以互换。
53.在一些实施例中,如图1和图2所示,为提高搬运速度,有效地提高整机的产能,晶圆激光加工装置10还包括安装在机架100上的传输机构1100,其中,传输机构1100位于缓存装置1000、涂胶清洗装置800和运动平台300之间围合的区域内,传输机构1100用于将料盒20中的晶圆传输至校正机构600的校正工位上。可以理解地,传输机构1100将晶圆传送到校正机构600后,后续主要由多轴机器人900和运动平台300来传送晶圆,这样,通过设置传输机构1100可以一定程度上减少多轴机器人900的活动范围910,确保整体运行的稳定性和结
构的紧凑性。
54.在一些实施例中,如图1和图2所示,激光加工组件400包括激光器光路组件410和视觉机构420,其中,激光器光路组件410位于运动平台300和料盒升降机构500之间围合的区域内,并位于晶圆激光加工装置10的靠近操作员30的一侧上。具体在本实施例中,激光器光路组件410与料盒20并排设置。视觉机构420位于激光器光路组件410和运动平台300的加工工位320之间的位置上。当然,实际上,视觉机构420和激光器光路组件410还可以互换位置,具体可根据实际情况而定。
55.可以理解地,具体在本实施例的一个具体实施方式中,以涂胶装置810用于涂胶,清洗装置820用于清洗为例,该晶圆激光加工装置10的工作原理,也即晶圆的自动化生产流程大致如下:
56.1)操作员30将料盒20放置在料盒20原始位置,料盒升降机构500将料盒20顶升到晶圆校正机构600的工作平台所在的平面上;
57.2)传输机构1100将晶圆夹持传输至校正机构600上,校正机构600对晶圆进行校正后,多轴机器人900从校正机构600上取出校正后的晶圆并将其搬运至支撑机构700上,涂胶装置810从支撑机构700上交接到晶圆后,对晶圆进行涂胶;
58.3)晶圆涂胶完成后,支撑机构700从涂胶装置810中交接到涂胶后的晶圆,多轴机器人900再从支撑机构700上取出涂胶后的晶圆,并将其搬运到缓存装置1000上;
59.4)多轴机器人900从缓存装置1000上取出涂胶后的晶圆,并将其搬运到运动平台300的上下料工位310上,运动平台300将涂胶后的晶圆从上下料工位310转运到加工工位320上;
60.5)激光加工组件400中的视觉机构420和运动平台300协同对位后,激光器光路组件410会对加工工位320上的涂胶后的晶圆进行激光加工(如沿着切割道进行切割);
61.6)激光加工完成后,运动平台300将切割后的晶圆从加工工位320转运到上下料工位310上,多轴机器人900从上下料工位310上取出切割后的晶圆,并将其搬运到校正机构600上,清洗装置820从校正机构600上交接到晶圆后,对切割后的晶圆进行清洗;
62.7)晶圆清洗完成后,校正机构600从清洗装置820中交接到清洗后的晶圆,传输机构1100从校正机构600上将晶圆夹持传输至料盒20中。
63.需说明的是,上述为一个晶圆完成涂胶、开槽和清洗的整个生产流程,其它的晶圆生产流程可依据上面的步骤循环执行,在该晶圆激光加工装置10中,可同时对多个晶圆进行生产,整体上,该晶圆激光加工装置10的生产步骤得到简化,生产效率得到提升,结构简单而且紧凑。
64.以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型。对于本领域的技术人员来说,本实用新型可以有各种更改和变化。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的权利要求范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。