1.本发明涉及一种用于确定眼镜镜片的至少一个光学参数的方法、装置和计算机程序、以及一种使用该至少一个光学参数制造眼镜镜片的方法。
背景技术:
2.从现有技术中已知用于确定眼镜镜片的光学参数的方法。
3.下文中又称为“标准”的标准din en iso 13666:2013
‑
10第9
‑
12节涉及眼镜镜片的光学参数,特别是关于眼镜镜片的球镜、棱镜和散光特性方面。特别地,该标准第9.7.1节和第9.7.2节将“后顶点焦度”定义为近轴后顶点焦距的倒数,将“前顶点焦度”定义为近轴前顶点焦距的倒数,分别以米为单位测量,“后顶点焦度”通常又被简称为“顶点焦度”。因此,在下文中,除非具体详细地明确提及,否则术语“顶点焦度”表示“后顶点焦度”。关于顶点焦度的更多详细信息,请参考该标准。
4.此外,该标准第11.2节提出了所谓的“球镜度”,其被定义为具有球镜度的眼镜镜片的顶点焦度的值或具有散光度的眼镜镜片的两条主子午线之一上的相应顶点焦度的值。根据该标准第12节的具有散光度的眼镜镜片将近轴平行光束结合在两条彼此垂直的单独焦线上,因此仅在两条主子午线上具有顶点焦度。在这种情况下,具有散光度的眼镜镜片也可以称为柱面眼镜镜片、球柱眼镜镜片、复曲面眼镜镜片或复球面眼镜镜片。根据该标准,“散光度”由柱镜度和轴线位置定义。在这种情况下,根据该标准第12.5节的“柱镜强度”表示“散光差”的绝对值,其指示两条主子午线上的顶点焦度之间的差。根据该标准第12.6节,“轴线位置”表示顶点焦度被用作参考值的主子午线的方向。最后,根据标准第12.8节,具有散光度的眼镜镜片的“强度”通过三个值指定,包括两条主子午线中的每条子午线的顶点焦度和柱镜强度。替代地,可以将三个值的算术平均值指定为“等效球镜度”,其被定义为球面距离矫正
ꢀ±ꢀ½
散光矫正,“散光矫正”由柱镜强度和轴线位置定义。
5.眼镜镜片的顶点焦度和棱镜度通常根据该标准第8.5节使用特殊的“顶点焦度测量仪器”确定。不利的是,这些测量仪器必须由为此目的而受过培训的专家、特别是配镜师操作,并且这些测量仪器以固定方式布置。而且,这种测量仪器通常被配置为确定眼镜的配戴参数,这些参数特别地包括角膜顶点距离、瞳孔直径、瞳孔距离和眼镜镜片的“配戴”前倾角。根据该标准第5.27节,“角膜顶点距离”被定义为使用者眼睛的角膜的顶点(角膜顶点)与眼镜镜片的后表面之间垂直于眼镜架平面(镜架平面)测量的距离。“瞳孔”表示存在于使用者的每只眼睛中的入射开口,光形式的辐射可以通过该入射开口进入眼睛内部,并且对于这些开口,可以从使用者的照片中确定直径和距离。根据该标准第5.18节,“配戴前倾角”或“前倾角”被定义为根据方框系统关于眼镜镜片的前表面的中心的法线与眼睛的水平注视线之间在竖直平面中的角度。
6.de 10 2011 115 239 a1披露了确定使用者数据以便关于使用者的选定眼镜架制造眼镜镜片。根据本发明的方法包括提供示踪数据集,该示踪数据集定义要制造的眼镜镜片的边缘的路线的形状;获取使用者戴着选定眼镜架时使用者头部的至少一个局部区域的
使用者图像数据;以及基于示踪数据集在使用者图像数据中确定要制造的眼镜镜片的边缘的轮廓点。
7.ep 2 608 109 a1披露了一种用于估计使用者配戴的眼镜中的矫正镜片的光焦度的方法,所述方法包括以下步骤:采集使用者面部的两张相继的图像,使用者面部被布置在用于采集这两张图像的装置前面,这些图像之一是戴着眼镜时采集的,而另一张图像是没有戴眼镜时采集的;将两张采集的图像之一相对于另一张图像进行校准;识别每张图像中的每只眼睛的虹膜的位置;评估每个被成像的虹膜的放大或缩小;以及基于评估的放大或缩小估计矫正镜片的光焦度。
8.ep 2 830 001 a1和us 2015/0029323 a1分别披露了一种图像处理装置,该图像处理装置包括确定单元,该确定单元基于第一轮廓位置和第二轮廓位置确定眼镜的特性,其中,第一轮廓位置指示没有戴着眼镜时出现的面部的轮廓位置并且从所获取的使用者的面部图像数据中被采集,并且第二轮廓位置指示通过眼镜出现的面部的轮廓位置并且所获取的使用者的面部图像数据被采集。
9.wo 2016/181310 a1披露了用于确定眼镜镜片的至少一个光学参数的装置、方法和计算机程序。就其而言,具有至少一个已知尺寸并且通过眼镜镜片记录的物体的至少一张图像经受图像处理方法,以便确定眼镜镜片的至少一个光学参数。眼镜镜片的光学参数特别地包括眼镜镜片的球镜度、柱镜强度和轴线位置。通过如此确定的光学参数,眼镜配戴者可以促使制造他/她的眼镜镜片和/或备用镜片的复制品。
10.wo 2017/125 902 a1披露了一种或多种具有计算机可执行指令的有形计算机可读非暂时性存储介质,当这些计算机可执行指令由至少一个计算机处理器执行时,使至少一个计算机处理器能够处理闪光在眼镜镜片上的至少一次反射的至少一张采集的图像,并且基于至少一张采集的图像确定镜片的一个或多个光学参数。
11.wo 2017/134 275 a1披露了一种用于确定位置和/或取向未知的镜片的光轴的方法。该方法包括:a) 获取包括可识别特征的背景的至少一个直接图像;b) 在背景与相机之间设置镜片,使得来自背景的光线在它们入射到相机上之前穿过镜片;c) 当通过镜片观看时,使用相机获取包括背景的至少一张间接图像;d) 识别直接图像中的至少一个可识别特征和间接图像中的对应的可识别特征;以及e) 使用来自d) 的对应关系来确定镜片的光轴,而无需将镜片的光轴相对于相机对齐。
技术实现要素:
12.从ep 2 830 001 a1和us 2015/0029323 a1的披露内容出发,特别地,本发明的目的是提供一种用于确定眼镜镜片的至少一个光学参数的方法、装置和计算机程序、以及还有一种用于使用该至少一个光学参数制造眼镜镜片的方法,该方法至少部分地克服了现有技术存在的缺点和局限性。
13.特别地,本方法、装置和计算机程序旨在使得可以确定眼镜镜片的至少一个光学参数,优选地是具有球镜度的眼镜镜片中的顶点焦度或具有散光度的眼镜镜片中的两条主子午线之一上的柱镜强度和相应的顶点焦度,无需特殊仪器;并且因此可以甚至由外行执行确定。
14.此目的是通过一种用于确定眼镜镜片的至少一个光学参数的方法、装置和计算机
程序、以及还有一种使用该至少一个具有独立专利权利要求的特征的光学参数来制造眼镜镜片的方法来实现的。在从属权利要求中给出了可以单独地或组合地实现的优选配置。
15.在下文中,术语“展示”、“具有”、“包含”或“包括”或其任何语法偏差都是以非排他的方式使用的。相应地,这些术语可以指代除了这些术语所引入的特征之外不存在其他特征的情况,或者存在一个或多个其他特征的情况。例如,表述“a展现b”、“a具有b”、“a包括b”或“a包含b”可以指代在a中没有提供除b之外的其他元件的情况(也就是说a仅由b组成的情况),以及除了b之外,在a中提供了一个或多个其他要素的情况,例如要素c、要素c和d、或甚至其他要素。
16.在第一方面,本发明涉及一种用于确定眼镜镜片的至少一个光学参数的方法。该方法包括优选地按指定顺序的以下步骤a) 至b),还可以部分同时地执行方法步骤。此外,该方法的各个或所有步骤可以重复执行。除了所述的方法步骤之外,该方法还可以包括另外的方法步骤。
17.用于确定眼镜镜片的至少一个光学参数的方法包括以下步骤:a) 使用眼镜镜片记录至少一张图像;以及b) 通过对该至少一张图像的图像处理来确定眼镜镜片的至少一个光学参数,其中,该至少一张图像包括包含双眼的眼睛部分和/或与眼镜镜片的使用者的双眼相邻的面部部分。
18.根据标准第8.1.1节和第8.1.2节,“眼镜镜片”被理解为是指用于矫正眼睛屈光异常的光学镜片,该光学镜片配戴在使用者眼睛前面,而不与眼睛接触。在本发明的上下文中,术语“眼镜”表示包括两个单独的眼镜镜片和眼镜架的任何元件,眼镜镜片被设置用于插入到由眼镜的配戴者选定的眼镜架中。代替这里采用的术语“使用者”,也可以同义地使用术语“配戴者”、“眼镜配戴者”或“受试者”之一。
19.这里提出的用于确定眼镜镜片的至少一个光学参数的方法适用于测量眼镜镜片的光学参数。在该过程中确定的值还可以用于选择和制造另外的眼镜,这些眼镜例如可以用作眼镜复制品或备用眼镜。在一种特定配置中,特别地在已经戴上眼镜的使用者的虚拟观看期间可以使用通过本发明获得的用于矫正眼镜镜片的值,这也被称为所谓的“虚拟试戴”,从而包括通过眼镜镜片达到的可观察到的缩小或放大,其方式为使得戴着眼镜的使用者的表示显得更加逼真。
20.通过本方法确定的至少一个光学参数特别地可以用于确定可以用作眼镜镜片的球柱镜片的值,以便通过矫正以这样的方式补偿眼睛的屈光不正,使得使用者可以实现尽可能最佳图像质量。在这种情况下,术语“光学参数”表示眼镜镜片的特性的值,该值可以特别地在由玻璃毛坯或镜片毛坯制造眼镜镜片期间设置,优选地以便实现预期的矫正。各种表达方式都适用于描述球柱镜片。为此目的,该标准在第11.2节定义了“球镜度”,球镜度被定义为具有球镜度的眼镜镜片的顶点焦度的值或具有散光度的眼镜镜片的两条主子午线之一上的相应顶点焦度的值。根据标准第9.7.1
‑
9.7.2节,“顶点焦度”被定义为分别以米为单位测量的近轴后顶点焦距的倒数。根据该标准第12节的具有散光度的球柱眼镜镜片将近轴平行光束结合在两条彼此垂直的单独焦线上,因此仅在两条主子午线上具有顶点焦度。根据该标准,“散光度”由柱镜度和轴线位置定义。在这种情况下,根据该标准第12.5节的“柱镜强度”表示“散光差”的绝对值,其指示两条主子午线上的顶点焦度之间的差。根据该
标准第12.6节,“轴线位置”表示顶点焦度被用作参考值的主子午线的方向。最后,根据标准第12.8节,具有散光度的眼镜镜片的“强度”通过三个值指定,包括两条主子午线中的每条子午线的顶点焦度和柱镜强度。
21.根据l. n. thibos、w. wheeler和d. horner (1997),“an application of fourier analysis to the description and statistical analysis of refractive error [焦度向量:傅里叶分析到屈光不正的说明和统计分析的应用]”, 视光学和视觉科学(optometry and vision science)74 (6), 第367
‑
375页,以便描述任意的球柱镜片和/或屈光不正,其分别适用于指定可以由三维屈光空间中的恰好一个点描述的视敏度向量,其中,三维屈光空间可以由与视敏度和柱镜强度对应或与之相关的坐标跨越。
[0022]
本方法的步骤a) 包括使用眼镜镜片记录至少一张图像。术语“图像”涉及物体的二维或三维表示,所述表示也称为通过光学记录单元的“成像”,光学记录单元在下文中称为“相机”。为此目的,可以记录单张图像或多张图像,特别是视频序列。在这种情况下,至少一张图像通过相机以这样的方式被记录,使得眼镜镜片布置在相机与要被成像的物体之间,从而从相机出射或入射在相机上的光束的路线被引导穿过眼镜镜片,所述路线又被称为“束路径”。
[0023]
根据本发明,根据步骤a) 记录至少一张图像以这样的方式实现,使得在至少一张图像上表示的物体包括使用者的至少一只眼睛、使用者的与至少一只眼睛相邻的面部部分、至少使用者的双眼、使用者的与眼睛相邻的面部部分、或两个物体,也就是说眼睛和面部部分,其中,眼镜镜片可以布置在相机与借助于使用者优选地按预期配戴眼镜镜片被成像的物体之间。使用者“按预期配戴眼镜镜片”是指使用者以这样的方式使用眼镜镜片,使得眼镜镜片可以根据标准第8.1.1节和第8.1.2节执行其功能,以矫正使用者的眼睛的屈光异常。为此目的,使用者可以将包括眼镜镜片的眼镜以这样的方式特别地布置在他/她的面部上,使得眼镜镜片可以执行所设想的功能。
[0024]
在本发明的一个特别优选的配置中,除了使用者按照预期配戴包括眼镜镜片的眼镜的至少一张图像之外,还可以记录使用者的至少一张另外的图像作为对比图像,使用者在该至少一张另外的图像上没有戴着眼镜,其中,在记录至少一张另外的图像期间使用的其余参数预期尽可能保持不变。没有戴着眼镜的使用者的至少一张另外的图像因此可以用作对比图像,如下面更详细地说明的,用于根据步骤b) 实现的在图像处理的上下文中眼镜镜片的至少一个光学参数的确定。在替代性或附加配置中,可以省去对比图像,特别是如果必须求助于没戴眼镜时的相同物体的已经可用的图像或者求助于使用者的双眼的和/或使用者的与双眼相邻的面部部分的已经可用的几何尺寸,通过图像处理可以至少近似地确定对应的数据。
[0025]
在本发明的一个特别优选的配置中,根据步骤a) 记录的至少一张图像因此可以表示使用者的至少一只眼睛,其中,如上所述,当使用者按预期戴着眼镜镜片时记录使用者的眼睛。在替代性或附加配置中,使用者的与双眼相邻的面部部分的至少一张图像可以包括使用者的至少一个侧向头部形状,特别是使用者的相关颞部周围的区域,该区域相对于使用者的眼睛的位置被侧向布置。这里,如已经提到的,在使用者按照预期配戴眼镜镜片的时,使用者的这个面部部分也被记录。为此目的,可以使用根据步骤a) 记录的单张图像或根据步骤a) 记录的多张图像,特别是为了以这种方式获得增大的测量确定性。
[0026]
此外,如已经提到的,相机用作光学记录单元,用于在使用者戴着包括眼镜镜片的眼镜时记录一只或多只眼睛和/或使用者的与该眼睛或这双眼睛相邻的面部部分的一张或多张图像。在这种情况下,相机可以优选地被移动通信设备包括。在这种情况下,术语“移动通信设备”包括特别是蜂窝电话(手机)、智能手机或平板电脑。然而,可想到其他类型的移动通信设备。然而,其他类型的相机是可能的。特别地,这可以涉及移动通信设备的至少一个后置相机或优选地至少一个前置相机。以这种方式,可以有利地在任意位置通过至少一个相机记录该眼睛或这双眼睛和/或使用者的与该眼睛或这双眼睛相邻的面部部分的期望图像。
[0027]
在一个特定的配置中,至少一个相机可以在可见光谱范围内灵敏,即根据iso标准20473:2007在380 nm到780 nm的波长处灵敏,特别是以便能够在白天和/或在人工照明下,例如在房间的照明区域执行记录。替代地或附加地,至少一个相机可以在红外光谱范围内灵敏,即在780 nm到1 mm、优选地780 nm到3 μm、特别是780 nm到1.4 μm的波长处(根据标准第4.4节,又称为“ir
‑
a”)灵敏。为了提供红外辐射,为此目的,可以设置在红外光谱范围内发射的光源,特别是具有相机对其具有足够灵敏度的波长。光源可以优选地选自基于固态的微型白炽灯或ir发射器。
[0028]
根据步骤b),眼镜镜片的至少一个光学参数通过对在步骤a) 期间记录的至少一张图像的图像处理来确定。从至少一个相机记录的至少一张图像中,可以通过图像处理、优选地在为其配置的评估单元中确定眼镜镜片的期望的至少一个光学参数。如已经提及的,根据标准第9.7.1
‑
9.7.2节,术语“顶点焦度”表示近轴后顶点焦距的倒数。具有散光度的球柱眼镜镜片在两条主子午线上都具有顶点焦度,散光度由柱镜强度和轴线位置定义。
[0029]
如已经提及的,而且,在一个特别优选的配置中,根据步骤a) 记录的至少一张图像可以表示包括使用者的眼睛的使用者的至少一个眼睛部分,可以从该使用者的至少一个眼睛部分中通过确定了眼睛的几何尺寸的图像处理确定眼镜镜片的至少一个光学参数。在这种情况下,术语“眼睛的几何尺寸”可以包含关于使用者的两只眼睛中的每一只眼睛的任何类型的尺寸。这特别地包括关于使用者的瞳孔的特定尺寸,特别是瞳孔和/或瞳孔周围的虹膜的位置和/或直径。如上面已经定义的,“瞳孔”表示存在于使用者的每只眼睛中并且光可以通过其进入眼睛内部的入射开口。在相反的方向上,瞳孔可以被视为出射开口,通过该出射开口可以定义使用者从眼睛到周围环境的观看方向。
[0030]
在本发明的一个特别优选的配置中,瞳孔和虹膜的共用直径可以用作使用者眼睛的优选几何尺寸。优选地,可以通过确定使用者眼睛中的白到白距离来确定所述直径。在这种情况下,“白到白距离”表示相应眼睛的透明区域的共用直径,该透明区域由角膜保护并包括眼睛的瞳孔和虹膜,瞳孔和虹膜被所谓的眼睛的“白色区域”包围。关于进一步的详细内容,请参考以下示例性实施例。然而,确定瞳孔和/或虹膜的直径的另外方式也是可能的。在替代性或附加配置中,眼睛的右眼角与左眼角之间的水平距离和/或眼睛的上眼睑与下眼睑之间的竖直距离可以被指定为使用者的眼睛的几何尺寸。可想到另外的几何尺寸。
[0031]
在本发明的一个特别优选的配置中,为了通过图像处理确定使用者的眼睛的几何尺寸的绝对值,而且可以包括相关眼睛与相机之间的距离。在一个配置中,在这种情况下,已知的或估计的值可以用于指示使用者的眼睛与相机之间的距离。在一个优选配置中,可以计量地检测使用者的眼睛与相机之间的距离。为此,评估单元此外可以具有用于检测使
用者的眼睛与相机之间距离的设备。由此可以通过对使用者的眼睛的图像进行图像处理来确定相机与使用者的眼睛之间的距离,该图像优选地根据步骤a) 由相机记录,此距离又被称为“瞳距”。为此目的,可以使用已知的算法,特别是像素匹配;人工智能、优选地机器学习、特别优选地神经网络、特别是用于分类或回归,即预定义函数(fit)的拟合参数。在另一个配置中,可以设置至少两个相机,这些相机以立体相机的形式共同布置并且因此被配置用于检测使用者的眼睛与屏幕之间的距离。在这种情况下,可以在检测已知物体或图像内容期间优选地通过已知数量的相机像素通过三角测量法来实现评估。替代地或附加地,包括相机的移动通信设备可以具有被配置用于确定相机与使用者的眼睛之间的瞳距的单独的距离测量单元。
[0032]
除了从根据使用者按照预期配戴包括眼镜镜片的眼镜的至少一张图像确定的使用者的眼睛的几何尺寸之外,关于没有戴眼镜的使用者的眼睛的几何尺寸的对比数据也可以是可用的。如已经提到的,为此目的,可以记录使用者未戴着眼镜时的至少一张另外的使用者图像作为对比图像,其中图像记录的其余参数预期尽可能保持不变.替代地或附加地,可以求助于已经可用的图像或者使用者的眼睛的已知几何尺寸或者可以通过图像处理至少近似地确定对应的数据。从使用者戴着包括眼镜镜片的眼镜时记录的使用者的眼睛的几何尺寸的比较和关于没有戴眼镜的使用者的眼睛的几何尺寸的对比数据,可以特别是使用评估单元确定使用者的眼睛的几何尺寸的变化,根据本发明,该变化可以用于推导出通过眼镜镜片实现的使用者的眼睛的距离矫正的等效球镜度。
[0033]
使用者的眼睛的几何尺寸的哪些变化是可观察到的,最初取决于所使用的眼镜镜片的屈光度。具有负屈光度的眼镜镜片,又称为“负镜片”,因此可以用于矫正使用者的近视(近视眼),与仿真镜片相比,镜片边缘的厚度增大,而镜片中心的厚度减小。相比之下,具有正屈光度的眼镜镜片,又称为“正镜片”,因此可以用于矫正使用者的远视(远视眼),与仿真镜片相比,镜片边缘的厚度减小,而镜片中心的厚度增大。根据iso标准8624:2011,术语“仿真镜片”或“演示镜片”被理解为是指由略微弯曲的、没有屈光度的光学透明材料构成的任意元件,其被配置为特别是用于演示目的,用作眼镜镜片的轮廓的模板。基于屈光度并考虑其顶点焦度的符号,当通过相应的眼镜镜片从前方观看使用者的相关眼睛时,眼镜镜片引起使用者的眼睛部分的可通过眼镜镜片看见的区域以不同的方式被表示。特别地,分别在正镜片的情况下和在负镜片的情况下发生通过眼镜镜片可看见的使用者的眼睛部分的区域的缩小和放大。
[0034]
方程 (1) 如下指定根据眼镜镜片的顶点焦度s'的大小对使用者的眼睛部分的可见区域的可观察到的变化v
e
的绝对值的估计:,
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)其中,对于d = 0.0005 m(假如存在负镜片)和d = 0.001 m(假如存在正镜片),使用折射率n = 1.5或1.52或1.6,e = 0.012 m和e' = 0.013348 m。在这种情况下,d是眼镜镜片的厚度,e是角膜顶点距离(hsa),e
´
是hsa和角膜顶点与眼睛的转动中心之间的距离之和。d1是镜片前表面的焦度,但在平面眼镜镜片(平光镜片)的情况下,可以简单地将小值设置为等于顶点焦度s'。替代地或附加地,这里可以使用另外的折射率值,特别是1.67或1.74或值的组合。
[0035]
因此,使用者的眼睛部分的可见区域的可观察到的变化v
e
可以引起几何尺寸中的至少一个的变化,优选地是上面定义的白到白距离的变化,而且还有可以用简单的方式计量地检测眼角或眼睑之间的距离的变化。根据方程 (1),使用者的眼睛部分的可见区域的可观察到的变化v
e
不仅取决于顶点焦度s'的符号而且还取决于其大小。从使用者的眼睛部分的可见区域的可观察到的变化v
e
的确定中,因此可以推导出相应眼镜镜片的顶点焦度s'的符号和大小,并且如果存在已知校准,则可以推导出相应眼镜镜片的顶点焦度s'的符号和绝对值。
[0036]
在进一步特别优选的配置中,如同样已经提及的,与一只或多只眼睛相邻的使用者的面部部分的图像可以至少包括使用者的侧向头部形状。在这个实施例中,特别是使用评估单元,可以通过考虑使用者的侧向头部形状的变化来推导出使用者的眼睛的距离矫正的等效球镜值。这里,使用者的侧向头部形状发生什么可观察到的变化也取决于所使用的眼镜镜片的屈光度。在负镜片的情况下,由于畸变,可观察到的变化展现出朝向相关眼睛的方向定向的侧向头部形状的凹形侧向偏移。相比之下,当使用正镜片时,会发生背朝相关眼睛向外定向的侧向头部形状的凸形侧向偏移形式的可观察到的变化。为了尽可能准确地检测侧向头部形状的变化,这里也可以使用上述算法,特别是像素匹配;人工智能、优选地机器学习、特别优选地神经网络、特别是用于分类或回归,即预定义函数(fit)的拟合参数。然而,这里,侧向头部形状的可观察到的变化不仅取决于顶点焦度s'的符号,而且还取决于其大小。从侧向头部形状的可观察到的变化的确定中,根据本发明,因此同样可以推导出相应眼镜镜片的顶点焦度s'的符号和大小,并且如果存在已知校准,则可以推导出相应眼镜镜片的顶点焦度s'的符号和绝对值。
[0037]
在特定配置中,特别是为了确定验光参数球镜、柱镜和轴位,可以使用人工智能、特别是机器学习、优选地通过神经网络来实现算法评估。在一个特别优选的配置中,在存在关于球柱镜矫正对放大和/或缩小的子午线差的影响的数据的情况下,已经可以从单个图像中推导出验光参数球镜、柱镜和轴位。
[0038]
而且,在一个特定的配置中,特别是为了确定用于距离矫正的验光参数球镜、柱镜和轴位,眼睛的角膜的表面形状可以由相机记录,其中,优选地可以实现没有任意、但是已知的结构、特别是条纹结构、格子结构或包括十字或圆的结构的投影的第一记录和带有该投影的第二记录。基于确定角膜的表面形状,可以以本领域技术人员已知的方式确定矫正的散光部分和轴位的散光部分。
[0039]
在本发明的进一步方面中,根据步骤a) 使用眼镜镜片记录的包括包含双眼的眼睛部分和/或与眼镜镜片的使用者的双眼相邻的面部部分的至少一张图像和没有使用眼镜镜片的被记录作为至少一张对比图像的至少一张另外的图像可以共同被视为相对于眼镜镜片的优选静态位置的移动图形。替代或附加于对比图像的记录,可以求助于已经可用的对比图像。至少一张图像和至少一张对比图像可以被配置为黑白、单色或多色。
[0040]
相应地,根据步骤b),眼镜镜片的至少一个光学参数可以通过以这种方式定义的移动图形的图像处理来确定。在这种情况下,图像处理可以优选地包括至少一种图像分析算法,其中,至少一种图像统计参数用于图像分析。在这种情况下,术语“图像统计参数”涉及静态参数,静态参数涉及至少一张图像,特别是涉及至少一张图像的、特别是移动图形的至少一个选定区域、优选地涉及至少一个像素。优选地,至少一个图像统计参数可以选自
‑ꢀ
至少一张图像中的至少一个选定区域的取向,特别是至少一张图像中的边缘的取向;
‑ꢀ
至少一张图像或其至少一个选定区域中的灰度值分布;
‑ꢀ
移动图形在方向和表现方面的光流;
‑ꢀ
移动图形的局部和总体变化;
‑ꢀ
通过傅立叶变换的空间频率分布。
[0041]
然而,其他类型的图像统计参数是可能的。
[0042]
特别优选地,至少一个图像统计参数可以用于通过至少一张图像、特别是通过移动图形确定眼镜镜片的至少一个光学参数。在这种情况下,优选地可以执行所述至少一个图像统计参数的分类或回归。然而,根据至少一个图像统计参数确定眼镜镜片的至少一个光学参数的其他方式也是可想到的。在这种情况下,术语“分类”表示值到至少两个定义的值范围之一的分配,称为“类别”。例如,图像统计参数可以关于其屈光度被分类,并因此被分配到例如“ 0.5屈光度”类或“ 1屈光度”类。相比之下,术语“回归”表示将至少一个图像统计参数与预定义函数拟合,拟合还被称为“fit”。为此目的,拟合可以包括例如建立选定图像统计参数(例如边缘的取向)与相关联的屈光度之间的关系的函数。在本发明的情况下,其中眼镜镜片的至少一个光学参数的值可以从连续值范围中选择,因此回归的使用是优选的。
[0043]
为了特别是通过分类或回归来根据至少一个图像统计参数确定眼镜镜片的至少一个光学参数,优选地可以使用人工智能方法,特别是机器学习方法。术语“机器学习”是指使用人工智能的方法,其用于自动生成分类或回归的模型。这里,可以优选地使用机器学习算法,该机器学习算法被配置为基于多个训练数据集生成期望的模型。在这种情况下,机器学习算法可以是受监督算法或自学习算法。机器学习算法可以利用和/或包括神经网络,该神经网络可以优选地通过至少一个训练数据集发展成经训练的神经网络。神经网络可以具有选自分层决策树、霍夫森林、回归森林、卷积神经网络(cnn)、深度神经网络(dnn)残差神经网络、像素级投票、像素级融合网络、深度学习的至少一个要素。替代地或附加地,至少一种其他人工智能方法、优选地核方法、特别是支持向量机(svm)的使用是可能的。
[0044]
本发明在不限制一般性的情况下基于神经网络的优选示例在下面进行说明;然而,以类似的方式使用一些其他机器学习算法是可能的。特别是为了获得期望的经训练的神经网络,神经网络的训练可以优选地在步骤b) 之前、特别优选地在步骤a) 之前实现。优选地,为此目的,使用多个训练数据集。在这种情况下,术语“训练数据集”涉及包括至少一个对的数据集,该至少一个对包括图像、优选地由上述图像和相关联的对比图像组成的移动图形、以及至少一个分配的光学参数,其中,光学参数可以选自眼镜镜片的光学参数或与眼镜镜片相关的光焦度,特别是使用眼镜镜片记录的图像中由眼镜镜片引起的放大或畸变。优选地,在渐进式镜片的情况下,眼镜镜片的至少一个光学参数可以选自球镜度、具有轴线位置的柱镜度和/或下加光。然而,眼镜镜片的其他光学参数也是可能的。
[0045]
为了生成足够数量的训练数据集,为此目的,可以优选地使用包括多个这样的数据集的数据库。在这种情况下,用于此目的的数据集可以包括多个
‑ꢀ
根据步骤a) 记录的图像,
‑ꢀ
具有不同光学参数的眼镜镜片的人工生成的图像,
‑ꢀ
可以通过用于不同眼镜镜片的自动机器人移动手动形成的视频序列,其中,可以移动至少一个眼镜镜片或至少一个相机,或
‑ꢀ
通过数据增广形成的处理图像。替代地或附加地,数据库可以包括适合作为选定神经网络的训练数据集的另外的数据集。在这种情况下,从训练数据集中,优选地首先可以确定至少一个图像统计参数,然后可以从中确定眼镜镜片的至少一个光学参数。因此可以实现将眼镜镜片的至少一个光学参数直接、省时和有针对性地分配给移动图形。
[0046]
优选地,至少一个图像和至少一个对比图像可以通过至少一个相机记录,优选移动通信设备、特别是智能电话或平板电脑包括的至少一个相机。然而,可想到其他类型的相机。同样,可以特别是通过分类或回归、优选地通过存储在移动通信设备上并且可以在那里被实现的经训练的神经网络根据至少一个图像统计参数实现眼镜镜片的至少一个光学参数的确定,而神经网络的先前训练可以优选地在固定计算机上执行。然而,可想到其他类型的配置。
[0047]
如果眼镜镜片被成形为一般柱面镜片,则可以优选地单独在两个不同的空间轴线方向上考虑至少一个图像统计参数的表现。此外,考虑到在眼镜镜片上出现屈光力分布或放大率分布,这在渐进式镜片的情况下特别常见,沿着屈光力分布的至少一个图像统计参数的变化可能不同。为了能够评估这样的图形,可以为对应经训练的神经网络形成多个不同的训练数据集,因此以便关于不同的图像统计参数对不同类型的眼镜镜片进行分类。
[0048]
为了能够执行至少一条空间轴线的确定,此外会有必要确定眼镜镜片的相对取向的确定。为此目的,可以使用各种使能帧检测的方法。特别地,光学参数的不连续性,例如屈光力或放大率的不连续性,可以发生在眼镜镜片的边缘的空间过渡处,其中,如果检测到不连续性,则可以确定眼镜镜片的相对位置。然而,其他类型的帧检测是可能的。
[0049]
因此,在本发明的这个特别优选的配置中,不需要在至少一张图像和至少一张对比图像之间假设的移动图形的变化与眼镜镜片的至少一个光学参数之间的分析描述。在这种情况下,相反,可以通过使用用于训练选定神经网络的训练数据集来生成和使用这种非线性、高维函数,以便特别是通过分类或回归根据至少一个图像统计参数来确定眼镜镜片的至少一个光学参数。
[0050]
在进一步的方面,本发明涉及一种用于确定眼镜镜片的至少一个光学参数的计算机程序,其中,该计算机程序被配置为执行眼镜镜片的至少一个光学参数根据如本文所述的用于确定眼镜镜片的至少一个光学参数的方法的确定。
[0051]
在进一步的方面,本发明涉及一种用于制造眼镜镜片的方法,其中,通过加工镜片毛坯(标准第8.4.1节)或眼镜镜片半成品(标准第8.4.2节)来制造眼镜镜片,其中,镜片毛坯或眼镜镜片半成品分别基于屈光数据和可选地定心数据被加工,其中,屈光数据是根据如本文所述的用于确定眼镜镜片的至少一个光学参数的方法定义的。屈光数据优选地包括分别针对视远和/或视近对使用者的至少一只眼睛的屈光不正关于球镜矫正和轴线位置的散光矫正方面的矫正。定心数据优选地至少包括
‑ꢀ
根据标准第17.3节,镜圈面部弧度,镜架平面与右镜片平面或左镜片平面之间的角度,和/或
‑ꢀ
定心点的坐标,即,定心点与鼻竖直边或方框系统的水平下边的距离的绝对值,根据标准第17.4节在镜片平面内测量,和/或
‑ꢀ
角膜顶点距离,即,根据标准第5.27节在垂直于镜架平面的观看方向上测量的眼镜镜片的后表面与角膜顶点之间的距离,和/或
‑ꢀ“
配戴”前倾角或前倾角,即,根据标准第5.18节,根据方框系统关于眼镜镜片的前表面的中心的法线与第一眼位的眼睛的注视线(通常假定是水平的)之间在竖直平面中的角度,和/或
‑ꢀ
可选的视远点,即,根据标准第5.16节,在给定条件下眼镜镜片上用于视远的视觉点的假设位置,和/或
‑ꢀ
可选的视近点,即,根据标准第5.17节,在给定条件下眼镜镜片上的用于视近的视觉点的假设位置。
[0052]
在进一步方面,本发明涉及一种用于确定眼镜镜片的至少一个光学参数的装置。根据本发明,该装置包括
‑ꢀ
至少一个相机,该至少一个相机被配置用于使用眼镜镜片记录至少一张图像;以及
‑ꢀ
评估单元,该评估单元被配置用于通过对图像的图像处理来确定眼镜镜片的至少一个光学参数,其中,至少一个相机被配置为以这样的方式执行至少一张图像的记录,使得至少一张图像包括包含双眼的眼睛部分和/或眼镜镜片的使用者的与双眼相邻的面部部分。
[0053]
在一个特别优选的配置中,评估单元此外可以具有用于检测使用者的眼睛与屏幕或相机之间的距离的设备。为此目的,通过图像处理,由相机特别是从使用者的眼睛部分记录的图像从相机与使用者的眼睛之间的瞳距的确定中可以执行瞳孔和/或虹膜的直径的确定。在一个优选的配置中,可以设置至少两个相机,这些相机以立体相机的形式共同布置并且因此被配置用于检测使用者的眼睛与屏幕之间的距离。替代地或附加地,该装置可以包括距离测量单元,该距离测量单元被配置用于确定相机与使用者的眼睛之间的瞳距。
[0054]
对于用于确定眼镜镜片的至少一个光学参数的计算机程序和装置的定义和可选配置以及用于制造眼镜镜片的方法的定义和可选配置,请参考以上或以下对用于确定眼镜镜片的至少一个光学参数的方法的描述。
[0055]
根据本发明的装置和本方法与传统装置和方法相比具有许多优点。
[0056]
综上所述,在本发明的上下文中,以下实施例是特别优选的:实施例1. 一种用于确定眼镜镜片的至少一个光学参数的方法,其中,该方法包括以下步骤:a) 使用眼镜镜片记录至少一张图像;以及b) 通过对至少一张图像的图像处理来确定眼镜镜片的至少一个光学参数,其中,该至少一张图像包括包含至少一只眼睛的眼睛部分或包含双眼的眼睛部分和/或与至少一只眼睛相邻的面部部分或与眼镜镜片的使用者的双眼相邻的面部部分。
[0057]
实施例2. 根据前一个实施例所述的方法,其中,顶点焦度作为光学参数被确定。
[0058]
实施例3. 根据前一个实施例所述的方法,其中,顶点焦度是选自:具有球镜度的眼镜镜片的顶点焦度或在具有散光度的眼镜镜片的两条主子午线之一上的相应顶点焦度。
[0059]
实施例4. 根据前述实施例中的任一个所述的方法,其中,通过使用眼镜镜片记录该至少一张图像实现通过该眼镜镜片可看见的使用者的眼睛部分的区域的变化。
[0060]
实施例5. 根据前一个实施例所述的方法,其中,该变化涉及眼睛的至少一个几何尺寸。
[0061]
实施例6. 根据前一个实施例所述的方法,其中,眼睛的几何尺寸选自:眼睛中的白到白距离、眼睛的右眼角与左眼角之间的水平距离以及眼睛的上眼睑与下眼睑之间的竖直距离。
[0062]
实施例7. 根据前述实施例中的任一个所述的方法,其中,根据方程 (1) 确定使用者的眼睛部分的或使用者的与双眼相邻的面部部分的可见区域的变化v
e
:,
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)其中,对于负镜片的情况下的d = 0.0005 m和在正镜片的情况下的d = 0.001 m,n = 1.5或1.52或1.6或1.67或1.74或其组合,使用e = 0.012 m和e' = 0.013348 m,其中s'对应于眼镜镜片的顶点焦度。
[0063]
实施例8. 根据前述实施例中的任一个所述的方法,其中,与至少一只眼睛或与双眼相邻的面部部分包括使用者的侧向头部形状。
[0064]
实施例9. 根据前述实施例所述的方法,其中,侧向头部形状包括使用者的相关颞部周围的区域。
[0065]
实施例10. 根据前述两个实施例中的任一个所述的方法,其中,通过使用眼镜镜片记录该至少一张图像来实现使用者的侧向头部形状的形状变化。
[0066]
实施例11. 根据前述实施例所述的方法,其中,使用具有负屈光度的眼镜镜片(负镜片)。
[0067]
实施例12. 根据前述实施例所述的方法,其中,该变化引起使用者的侧向头部形状的凹形侧向偏移。
[0068]
实施例13. 根据前述三个实施例中的任一个所述的方法,其中,使用具有正屈光度的眼镜镜片(正镜片)。
[0069]
实施例14. 根据前一个实施例所述的方法,其中,形状的变化引起使用者的侧向头部形状的凸形侧向偏移。
[0070]
实施例15. 根据前述实施例中的任一个所述的方法,其中,在使用者戴着眼镜时执行该方法。
[0071]
实施例16. 根据前述实施例中的任一个所述的方法,其中,附加地记录没有使用眼镜镜片时的至少一张另外的图像作为对比图像。
[0072]
实施例17. 根据前述实施例中的任一个所述的方法,其中,记录该至少一张对比图像以确定该变化。
[0073]
实施例18. 根据前一个实施例所述的方法,其中,在使用者未戴着眼镜或戴着包括仿真镜片而不是眼镜镜片的眼镜时记录该至少一张对比图像。
[0074]
实施例19. 根据前述实施例中的任一个所述的方法,其中,为了确定该变化,必须求助于已经可用的对比图像。
[0075]
实施例20. 根据前述实施例中的任一个所述的方法,其中,为了确定该变化,求助于使用者的至少一只眼睛的或双眼的和/或使用者的与该至少一只眼睛或双眼相邻的面部部分的已经可用的几何尺寸。
[0076]
实施例21. 根据前述实施例中的任一个所述的方法,其中,附加地检测使用者的眼睛与被配置用于记录该至少一张图像的至少一个相机之间的距离。
[0077]
实施例22. 根据前一个实施例所述的方法,其中,使用者的眼睛与相机之间的距离是瞳距。
[0078]
实施例23. 根据前述两个实施例中的任一个所述的方法,其中,通过距离测量单元检测该距离。
[0079]
实施例24. 根据前述三个实施例中的任一个所述的方法,其中,通过相机检测该距离。
[0080]
实施例25. 根据前述四个实施例中的任一个所述的方法,其中,通过被共同布置用于检测距离的至少两个相机来检测该距离。
[0081]
实施例26. 根据前一个实施例所述的方法,其中,该至少两个相机以立体相机的形式被共同布置。
[0082]
实施例27. 根据前述实施例中的任一个所述的方法,其中,附加地记录使用者的眼睛的角膜。
[0083]
实施例28. 根据前一个实施例所述的方法,其中,实现没有任意已知的结构的投影的第一记录和带有该投影的第二记录。
[0084]
实施例29. 根据前述两个实施例中的任一个所述的方法,其中,从使用者的眼睛的角膜的记录中确定使用者的眼睛的角膜的表面形状。
[0085]
实施例30. 根据前一个实施例所述的方法,其中,使用者的眼睛的角膜的表面形状用于确定验光参数球镜、柱镜和轴位。
[0086]
实施例31. 根据前一个实施例所述的方法,其中,从验光参数球镜、柱镜和轴位的确定中确定矫正的散光部分和轴位的散光部分。
[0087]
实施例32. 根据前一个实施例所述的方法,其中,为了确定验光参数球镜、柱镜和轴位,使用人工智能、机器学习和/或网络、优选地神经网络来实现算法评估。
[0088]
实施例33. 根据前一个实施例所述的方法,其中,特别是如果关于球柱镜矫正对放大和/或缩小的子午线差的影响的数据可用,则从单个图像中推导出验光参数球镜、柱镜和轴位。
[0089]
实施例34. 一种用于确定眼镜镜片的至少一个光学参数的计算机程序,其中,该计算机程序被配置为执行根据前述实施例中的任一个所述的方法步骤。
[0090]
实施例35. 一种用于制造至少一个眼镜镜片的方法,其中,通过加工镜片毛坯或眼镜镜片半成品来制造眼镜镜片,其中,镜片毛坯或眼镜镜片半成品分别基于屈光数据和可选地定心数据被加工,其中,屈光数据是根据如本文所述的用于确定眼镜镜片的至少一个光学参数的方法定义的。
[0091]
实施例36. 一种用于确定眼镜镜片的至少一个光学参数的装置,该装置包括
‑ꢀ
至少一个相机,该至少一个相机被配置用于使用眼镜镜片记录至少一张图像;以及
‑ꢀ
评估单元,该评估单元被配置用于通过对至少一张图像的图像处理来确定眼镜镜片的至少一个光学参数,其中,至少一个相机被配置为以这样的方式执行至少一张图像的记录,使得至少
一张图像包括包含至少一只眼睛的眼睛部分和/或与眼镜镜片的使用者的与至少一只眼睛或双眼相邻的面部部分。
[0092]
实施例37. 根据前一个实施例所述的装置,其中,该装置此外被配置为确定该装置与使用者的眼睛之间的距离。
[0093]
实施例38. 根据前一个实施例所述的装置,其中,评估单元此外被配置为通过对使用者的眼睛的图像的图像处理来确定该装置与使用者的眼睛之间的距离。
[0094]
实施例39. 根据前述两个实施例中的任一个所述的装置,其中,该装置此外包括距离测量单元,其中,该距离测量单元此外被配置为确定该装置与使用者的眼睛之间的距离。
[0095]
实施例40. 根据前述三个实施例中的任一个所述的装置,其中,设置了至少两个相机,这些相机被共同配置用于检测该装置与使用者的眼睛之间的距离。
[0096]
实施例41. 根据前一个实施例所述的装置,其中,该至少两个相机以立体相机的形式被共同布置。
[0097]
实施例42. 根据前述五个实施例中的任一个所述的装置,其中,该装置被配置为移动通信设备。
[0098]
实施例43. 根据前一个实施例所述的装置,其中,该移动通信设备包括该至少一个相机、该评估单元和可选地该距离测量单元。
[0099]
实施例44. 根据前述两个实施例中的任一个所述的装置,其中,该移动通信设备被配置为智能电话。
[0100]
在进一步方面,上述方法和/或上述装置和/或上述计算机程序可以与至少一个另外的方法和/或至少一个另外的装置和/或另外的计算机程序一起被采用。所述至少一个另外的方法可以是例如确定使用者的眼睛的屈光不正的方法,优选地根据ep 19170558.1的方法,其中,所述方法包括以下步骤:a) 在屏幕上表示字符,其中屏幕上所表示的字符的参数是变化的;b) 根据屏幕上表示的字符检测使用者的反应;c) 建立时间点,在该时间点,从使用者的反应中明显看出屏幕上表示的字符的可辨别性;以及d) 根据在该时间点定义的参数确定使用者的眼睛的屈光不正的值,其中,屏幕上表示的字符是周期性图形,其中,屏幕上表示的图形的参数包括至少一个空间频率,并且根据在该时间点定义的图形的空间频率确定屈光不正的值。
[0101]
作为上述方法的替代方案或附加于其,至少一个另外的方法例如也可以是用于确定使用者的眼睛的屈光不正的方法,优选地根据ep 19170561.5的方法,其中,该方法包括以下步骤:a) 在屏幕上表示字符,其中屏幕上所表示的字符的参数是变化的;b) 根据屏幕上显示的字符检测使用者的眼睛的眼球移动度量;以及c) 建立时间点,从使用者眼睛的眼球运动度量中明显看出使用者对屏幕上所表示的字符的辨别阈值;以及d) 根据在该时间点定义的参数确定使用者的眼睛的屈光不正值。
[0102]
作为上述方法的替代方案或附加于其,至少一个另外的方法例如也可以是用于测
量眼镜架中的左和/或右眼镜镜片的屈光力分布的方法,优选地是根据ep 19170715.7的方法,在该方法中,在第一步骤中,至少一个图像采集设备用于从至少一个第一记录位置采集场景的至少一个第一成像,其中,所述至少一个第一成像具有至少两个结构点并且在眼镜架中包含左和/或右眼镜镜片,眼镜架的一区段定义眼镜架的坐标系,其中,这至少两个结构点中的每一个的至少一个成像束路径分别至少一次穿过并且至少一次不穿过眼镜架的第一和/或第二眼镜镜片。每个成像束路径包括结构点的位置以及还有入射在至少一张图像采集设备中的主光线。在时间上可以在第一步骤之前或之后的进一步步骤包括在没有眼镜架的第一和/或第二眼镜镜片或者没有包含第一和/或第二眼镜镜片的眼镜架的情况下采集场景的至少一个进一步成像,其中通过至少一个图像采集设备进行的场景的第一成像的相同的至少两个结构点来自第一记录位置或来自不同于第一记录位置的至少一个另外的记录位置。进一步步骤中的至少一个图像采集设备可以与第一步骤中的至少一个图像采集设备相同或不同。优选地,进一步步骤中的至少一个图像采集设备与第一步骤中的至少一个图像采集设备相同。这之后是计算步骤,该计算步骤包括通过图像评估确定来自所述至少两个结构点的相应地没有穿过左/右眼镜镜片的相应至少一个束路径的所述场景的成像和该场景的至少一个另外的成像的坐标系中
ꢀ‑ꢀ
参考眼镜架的坐标系
ꢀ‑ꢀ
所述至少两个结构点的坐标。在这个步骤之后,在确定眼镜架的坐标系中左眼镜镜片的至少一个区段的屈光力分布的步骤中和/或在确定眼镜架的坐标系中右眼镜镜片的至少一个区段的屈光力分布的步骤中分别从已经穿过相应眼镜镜片的成像束路径确定屈光力分布。
[0103]
作为上述方法的替代方案或附加于其,至少一个另外的方法例如也可以是用于测量眼镜架中的左和/或右眼镜镜片的屈光力分布的方法,优选地是根据ep 19170715.7的方法,在该方法中,在第一步骤中,至少一个图像采集设备用于从至少一个第一记录位置采集场景的至少一个第一成像,其中,所述至少一个第一成像具有至少两个结构点并且在眼镜架中包含左和/或右眼镜镜片,眼镜架的一区段定义眼镜架的坐标系,其中,这至少两个结构点中的每一个的至少一个成像束路径分别至少一次穿过并且至少一次不穿过眼镜架的第一和/或第二眼镜镜片。每个成像束路径包括结构点的位置以及还有入射在至少一张图像采集设备中的主光线。可以在时间上在第一步骤之前或之后或者与第一步骤同时执行的进一步步骤包括使用眼镜架中的左和/或右眼镜镜片并且使用定义眼镜架的坐标系的眼镜架区段通过至少一个图像采集设备从不同于第一记录位置的至少一个另外的记录位置采集场景的至少一个另外的成像,至少一个成像束路径用于第一成像中采集的相同至少两个结构点,其中,所述至少一个成像束路径分别至少一次穿过并且至少一次不穿过眼镜架的第一和/或第二眼镜镜片。这之后是进一步步骤,该步骤包括通过图像评估计算来自所述至少两个结构点的相应地没有穿过左/右眼镜镜片的相应至少一个束路径的场景的和该场景的至少一个另外的成像的坐标系中
ꢀ‑ꢀ
参考眼镜架的坐标系
ꢀ‑ꢀ
该至少两个结构点的坐标。之后,分别从已经穿过相应眼镜镜片的这些成像束路径中,计算眼镜架的坐标系中左镜片的至少一区段的屈光力分布和/或确定眼镜架的坐标系中右镜片的至少一区段的屈光力分布。
[0104]
优选地,在用于测量左和/或右眼镜镜片的屈光力分布的上述两种方法中,优选地在眼镜架中,多个结构点在场景的相应地第一成像中从分别至少一个第一记录位置被采集,并且相应地随后的步骤基于此相应的多个结构点被执行。多个结构点应理解为是指优
选地至少10个、更优选地至少100个、特别优选地至少1000个、非常特别优选地至少10000个结构点。特别地,多个结构点 ≥ 100个结构点且 ≤ 1000个结构点。
[0105]
作为上述方法的替代方案或附加于其,至少一个另外的方法例如也可以是用于确定眼镜镜片的屈光力分布的方法,优选地根据ep 19170714.0的方法,这样使得从特定观看方向的眼睛前区段的成像的大小和/或形状比较得出局部屈光力成为可能。这通过眼镜镜片位于眼睛前区段前方时和眼镜镜片没有位于眼睛前区段前方时执行眼睛前区段的至少一次记录、并且相应地将戴着眼镜镜片和没有戴着眼镜镜片时的记录彼此进行比较来完成。
[0106]
在上级应用中,上述各种方法,即根据本发明的方法以及还有至少一个另外的方法,可以从分别获得的结果的比较中按顺序组合,例如,以获得更高的准确度或对在各个方法中获得的结果进行合理性检查。上述各种方法可以在上级应用中相继地或同时地实现。如果相继地实现各种方法,则它们的顺序可以相互独立和/或可以涉及任何期望的顺序。如果相继地实现各种方法,则可以优选地最后执行上述用于确定屈光力分布的方法中的至少一个方法。上级应用可以是例如包括各种方法的计算机程序。
附图说明
[0107]
从以下对优选示例性实施例的描述、特别结合从属权利要求,本发明的进一步细节和特征将变得清楚。在这种情况下,相应特征可以仅自身实现或者以彼此的组合作为多个来实现。本发明不局限于这些示例性实施例。附图中示意性地示出了这些示例性实施例。在这种情况下,各个图中相同的附图标记表示相同或功能相同的元件或在其功能方面彼此对应的元件。详细而言:图1a至图1c示出了本发明的运行的示意图;图2a和图2b示出了眼镜镜片对根据具有相同角膜顶点距离的眼镜镜片的材料的折射率n(图2a)和相应地在折射率n相同时根据角膜顶点距离(图2b)而变的变化v
e
的影响的简图;以及图3示出了根据本发明的方法和用于确定眼镜镜片的至少一个光学参数的相关联装置的优选示例性实施例。
具体实施方式
[0108]
图1a至图1c示意性展示了本发明的运行。
[0109]
为此,图1a示意性地示出了使用者的眼睛部分110,具有右眼112和左眼112
‘
。在这种情况下,术语“右”和“左”应该从使用者视线的方向来指定。使用者的每只眼睛112、112
‘
包括瞳孔114、114
‘
、分别围绕瞳孔114、114
‘
的虹膜116、116
‘
、以及分别围绕虹膜116、116
‘
的白色区域118、118
‘
。在这种情况下,白到白距离120、120
‘
可以优选地被指定为相应眼睛112、112
‘
的透明区域的共用直径,该透明区域由角膜保护并且分别包括瞳孔114、114
‘
和虹膜116、116
‘
。替代地或附加地,每只眼睛112、112
‘
的右眼角124、124
‘
与左眼角126、126
‘
之间的水平距离122、122
‘
或上眼睑130、130
‘
与下眼睑132、132
‘
之间的竖直距离128、128
‘
可以被计量地检测。此外,使用者的眼睛部分110在右眼112的右侧和左眼112
‘
的左侧展现出使用者的相应侧向头部形状134、134
‘
。
[0110]
根据图1a的图示中的使用者没有配戴任何视觉辅助件。替代地,使用者可以配戴包括仿真镜片(这里未展示)的视觉辅助件。相比之下,图1b和图1c均示出了同一使用者的眼睛部分110,但这里所述使用者分别配戴眼镜136。图1b和图1c所示的眼镜136分别是全框眼镜,包括眼镜架138,该眼镜架具有用于相应眼镜镜片140、140
‘
的两个容座,这些容座分别围住两个眼镜镜片140、140
‘
。然而,在本发明的范围内,使用者也可以替代地具有半框眼镜(这里未展示),其中两个眼镜镜片140、140
‘
仅部分地与眼镜架138相邻,或者具有无框眼镜(同样未在这里展示),其中眼镜镜片140、140
‘
均具有用于接纳连接眼镜架138的安装件的孔。此外,眼镜136可以包括另外的部件(这里未展示),特别是用于将眼镜136支撑在使用者的每只耳朵上的相应镜腿,以及优选地使用者鼻子的每一侧上的相应鼻托。眼镜架138、镜腿和可选地存在的鼻托的整体也可以共同称为“镜架”。
[0111]
一方面图1a和图1b与另一方面图1a和图1c之间的眼睛部分110的比较揭示了由于使用者分别配戴具有屈光度的眼镜136而引起的以下差异,这些差异根据本发明用于确定两个眼镜镜片140、140
‘
中的每一个的至少一个光学参数。
[0112]
图1b中使用者配戴的眼镜136的眼镜镜片140、140
‘
均包括具有负屈光度的眼镜镜片,该眼镜镜片也又称为“负镜片”142、142
‘
并且可以由于所述屈光度而用于矫正使用者的近视(近视眼)。与仿真镜片相比,每个负镜片142、142
‘
在镜片边缘的厚度增大,而每个负镜片142、142
‘
在镜片中心的厚度减小。在根据图1b的图示中,假设两个负镜片142、142
‘
具有相同的屈光度。然而,原则上,两个负镜片142、142
‘
之间的屈光度差异是可以想到的,并且可以以类似于以下描述的方式用于根据本发明确定每个负镜片142、142
‘
的至少一个光学参数。
[0113]
基于屈光度并考虑到它们的顶点焦度的符号,当使用者的相关眼睛112、112
‘
通过相应的负镜片142、142
‘
从前方观看时,负镜片142、142
‘
具有通过负镜片142、142
‘
可看见的使用者的眼睛部分110的区域以缩小的方式表示的效果。如上已经说明的,根据方程 (1),使用者的眼睛部分110的可见区域的可观察到的变化v
e
的大小这里取决于负镜片142、142
‘
的顶点焦度s'的大小:,
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)其中,这里d = 0.0005 m,折射率n = 1.5或1.52或1.6或1.67或1.74或其组合,e = 0.012 m且e' = 0.013348 m。对于一级近似,d1这里对应于平面眼镜镜片(平光镜片)情况下的顶点焦度s'。
[0114]
使用者的眼睛部分110的可见区域的可观察到的变化v
e
可以引起白到白距离120、120
‘
的减小144,这可以以简单的方式被计量地检测。例如,白到白距离120、120
‘
可以减小大致5%,从根据图1a的实施例中的0.52 mm减小到根据图1b的实施例中的0.47 mm。然而,其他测量值也是可能的。为了尽可能准确地检测白到白距离120、120
‘
,可以使用算法,特别是像素匹配、机器学习、神经网络、或预定义函数(fit)的拟合参数。替代地或附加地,从每只眼睛112、112
‘
的右眼角124、124
‘
到左眼角126、126
‘
的水平距离122、122
‘
的减小144或上眼睑130、130
‘
与下眼睑132、132
‘
之间的竖直距离128、128
‘
的减小也可以被计量地检测(这里未展示),以便以此方式确定使用者的眼睛部分110的可见区域的可观察到的变化v
e
。
[0115]
根据方程 (1),图1b中的使用者的眼睛部分110的可见区域的可观察到的变化v
e
不仅取决于顶点焦度s'的符号而且还取决于其大小。从使用者的眼睛部分110的可见区域的可观察到的变化v
e
的确定,优选地根据白到白距离120、120
‘
的减小144,相应的眼镜镜片140、140
‘
的顶点焦度s'的符号和大小因此可以通过已知的校准来被推导出。
[0116]
在进一步优选实施例中,替代地或附加地,可以通过计量地检测使用者的侧向头部形状134、134
‘
的变化146来推导出使用者的眼睛112、112
‘
的距离矫正的等效球镜值。通过在根据图1b的实施例中使用负镜片142、142
‘
,变化146沿相关眼睛112、112
‘
的方向上展现出侧向头部形状134、134
‘
的凹形侧向偏移。为了尽可能准确地检测侧向头部形状134、134
‘
的变化146,这里也可以使用已知算法,特别是像素匹配、机器学习、神经网络、或预定义函数(fit)的拟合参数。在这种情况下,图1b中的侧向头部形状134、134
‘
的可观察到的变化146不仅取决于顶点焦度s'的符号而且还取决于其大小。从侧向头部形状134、134
‘
的可观察到的变化146的确定中,相应眼镜镜片140、140
‘
的顶点焦度s'的符号和大小因此同样可以通过已知的校准被推导出。
[0117]
与根据图1b的实施例相比之下,图1c中使用者配戴的眼镜136的眼镜镜片140、140
‘
均包括具有正光焦度的眼镜镜片,该眼镜镜片又被称为“正镜片”148、148
‘
并且可以由于所述焦度而用于矫正使用者的远视(远视眼)。与仿真镜片相比,每个正镜片148、148
‘
在镜片边缘的厚度减小,而每个正镜片148、148
‘
在镜片中心的厚度增大。在根据图1c的图示中,同样假设两个正镜片148、148
‘
具有相同的屈光度。然而,原则上,两个正镜片148、148
‘
之间的屈光度差异是可以想到的,并且可以以类似于以下描述的方式用于根据本发明确定每个正镜片148、148
‘
的至少一个光学参数。
[0118]
基于屈光度并考虑到它们的顶点焦度的符号,当使用者的相关眼睛112、112
‘
通过相应的正镜片148、148
‘
从前方观看时,正镜片148、148
‘
具有通过正镜片148、148
‘
可看见的使用者的眼睛部分110的区域以放大的方式表示的效果。如上已经说明的,根据方程 (1),使用者的眼睛部分110的可见区域的可观察到的变化v
e
的大小这里取决于正镜片148、148
‘
的顶点焦度s'的大小:,
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)其中,这里d = 0.001 m,折射率n = 1.5或1.52或1.6或1.67或1.74或其组合,e = 0.012 m且e' = 0.013348 m。对于一级近似,d1这里对应于平面眼镜镜片(平光镜片)情况下的顶点焦度s'。
[0119]
使用者的眼睛部分110的可见区域的可观察到的变化v
e
可以引起白到白距离120、120
‘
的增大150,这可以以简单的方式被计量地检测。例如,白到白距离120、120
‘
可以减小大致5%,从根据图1a的实施例中的0.52 mm减小到根据图1c的实施例中的0.57 mm。然而,其他测量值也是可能的。替代地或附加地,从每只眼睛112、112
‘
的右眼角124、124
‘
到左眼角126、126
‘
的水平距离122、122
‘
的增大150或上眼睑130、130
‘
与下眼睑132、132
‘
之间的竖直距离128、128
‘
的增大也可以被计量地检测(这里未展示)根据方程 (1),图1b中的使用者的眼睛部分110的可见区域的可观察到的变化v
e
不仅取决于顶点焦度s'的符号而且还取决于其的大小。从使用者的眼睛部分110的可见区域的可观察到的变化v
e
的确定,优选地根据白到白距离120、120
‘
的增大150,相应的眼镜镜
片140、140
‘
的顶点焦度s'的符号和大小因此可以通过校准来被推导出。
[0120]
在进一步优选实施例中,替代地或附加地,这里也可以通过计量地检测使用者的侧向头部形状134、134
‘
的变化152来推导出使用者的眼睛112、112
‘
的距离矫正的等效球镜值。通过在根据图1c的实施例中使用正镜片148、148
‘
,变化152展现出侧向头部形状134、134
‘
背朝相关眼睛112、112
‘
向外的凸形侧向偏移。在这种情况下,图1c中的侧向头部形状134、134
‘
的可观察到的变化152不仅取决于顶点焦度s'的符号而且还取决于其大小。从侧向头部形状134、134
‘
的可观察到的变化152的确定中,相应眼镜镜片140、140’的顶点焦度s'的符号和大小这里因此同样也可以通过已知的校准被推导出。
[0121]
图2a示出了仅验证眼镜镜片140、140
‘
对变化v
e
的非常小的影响的简图。这里,变化v
e
被展示为具有相同角膜顶点距离的眼镜镜片140、140
‘
的材料的折射率n的函数。
[0122]
图2b示出了另一简图,其通过对比证实了眼镜镜片140、140
‘
对变化v
e
的更大影响。这里,变化v
e
被展示为在眼镜镜片140、140
‘
的材料的折射率n相同时角膜顶点距离(hsa)的函数。
[0123]
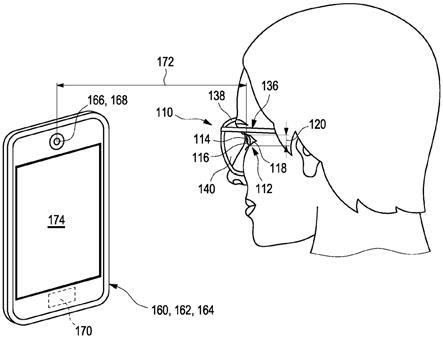
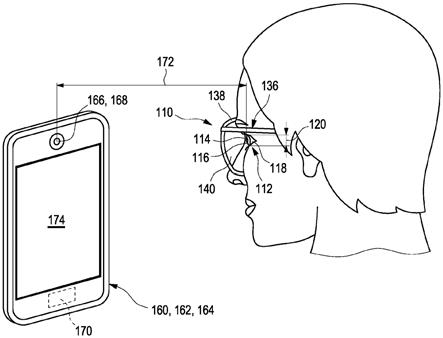
图3示意性地示出了根据本发明的方法和用于确定眼镜镜片140的至少一个光学参数的相关联装置160的一个优选示例性实施例。在根据图3的图示中
‑
但不限制一般性
‑
装置160被实施为智能电话164形式的移动通信设备162。然而,呈特别是作为蜂窝电话(手机)或平板电脑的某个其他移动通信设备162形式、或呈某个其他设备形式的装置160同样是可想到的。
[0124]
装置160包括相机166,其中,相机166可以优选地是智能电话118的前置相机168。根据本发明,相机162被配置用于记录图像,其中,图像包括包含双眼112的眼睛部分110和/或与眼镜镜片140的使用者的眼睛112相邻的面部部分110。
[0125]
装置110此外包括评估单元170,该评估单元被配置用于通过对图像的图像处理来确定眼镜镜片140的至少一个光学参数,在一个特别优选的配置中,评估单元170此外可以包括用于检测使用者的眼睛112与相机166之间的距离的设备。为此目的,通过对相机166从使用者的眼睛部分110记录的图像的图像处理,通过确定相机166与使用者的眼睛112之间的又被称为“瞳距”172的距离的方式,可以确定使用者的眼睛112的白到白距离120的绝对值。在替代性配置(未展示)中,可以设置至少两个相机,这些相机以立体相机的形式共同布置并且因此被配置用于检测瞳距172。替代地或附加地,装置160可以具有被配置用于确定瞳距172的单独的距离测量单元(未展示)。附加地,装置160可以包括另外的组成部分,特别是用于向使用者显示结果和/或要求的屏幕174。
[0126]
根据用于确定眼镜镜片140的至少一个光学参数的本方法,步骤a)包括记录包括眼睛部分110和/或与使用者的双眼112相邻的面部部分的图像,该眼睛部分包括双眼112,其中,如图3示意性所示,使用者优选地配戴包括眼镜镜片140的眼镜136。步骤b)包括通过对在步骤a)期间记录的图像进行图像处理来确定眼镜镜片140的至少一个光学参数,其中,优选地使用上文在关于图1a至图1c的描述中说明的过程。
[0127]
附图标记清单110眼睛部分112,112
‘
眼睛114,114
‘
瞳孔
116,116
‘
虹膜118,118
‘
白色区域120,120
‘
白到白距离122,122
‘
水平距离124,124
‘
右眼角126,126
‘
左眼角128,128
‘
竖直距离130,130
‘
上眼睑132,132
‘
下眼睑134,134
‘
侧向头部形状136眼镜138眼镜架140,140
‘
眼镜镜片142,142
‘
负镜片144减小146(凹形)变化148,148
‘
正镜片150放大152(凸形)变化160用于确定眼镜镜片的至少一个光学参数的装置162移动通信设备164智能电话166相机168前置相机170评估单元172瞳距174屏幕。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。