1.本技术涉及医药包装设备技术领域,尤其是涉及一种高速灌装机的物料液位控制组件。
背景技术:
2.药品分装中,通常采用定量灌装机进行灌装。定量灌装机是指通过控制充填到包装容器内的液体容积进行计量和灌装的机器。相关技术中,定量灌装机包括药液罐、与药液罐连通的灌装针、位于灌装针下方的灌装工位、位于灌装工位前方的第一称重装置、位于灌装工位后方的第二称重装置、位于第二称重装置后方的补液装置和控制主机,所述定量灌装机灌装时,待灌装瓶体进入第一称重装置进行瓶体称重并反馈至控制主机,再由第一称重装置输送至灌装工位,通过灌装针对瓶体进行灌装,经过灌装的瓶体再流转至第二称重装置,第二称重装置对装有液体的瓶体进行称重并反馈至控制主机,再由第二称重装置向补液装置流转,控制主机通过第一称重装置、第二称重装置的重量差进行灌装量判定,若灌装量符合标准,瓶体直接由补液装置流转出,若灌装量不符合标准,控制主机控制补液装置进行补液灌装,再由补液装置流转出。
3.针对上述中的相关技术,发明人认为定量灌装需要经过多次称重和补液才能够完成,各工序间需要不同程度的间歇停顿以配合,定量灌装生产连续性低,降低生产效率。
技术实现要素:
4.为了提高灌装生产连续性,本技术提供一种高速灌装机的物料液位控制组件。
5.本技术提供的高速灌装机的物料液位控制组件,采用如下的技术方案:
6.高速灌装机的物料液位控制组件,包括原液罐、储液罐、开设于储液罐上的进液口、设于进液口上的进液控制阀、设于储液罐上的液位传感器、开设于储液罐上的出液口、设于出液口上的灌装组件和控制主机,所述原液罐的输出口与所述储液罐的进液口连接,所述原液罐和储液罐的之间设有液体输送泵,所述液位传感器用于采集储液罐灌内液位变化参数,所述液位传感器与所述控制主机的数据端连接,所述进液控制阀、灌装组件和液体输送泵受控于所述控制主机。
7.通过采用上述技术方案,所述液位传感器用于检测储液罐内液体的液位参数,并将检测结果反馈至控制主机,控制主机控制液体输送泵和进液控制阀对储液罐进行补液,以保证灌装过程中液位恒定,保持储液罐灌内至灌装组件输出口处的压力差恒定,压力差恒定下,灌装组件的灌装出液流速是恒定的,因此,单位时间内灌装出液的液体量是相等的,控制主机通过控制灌装组件的灌装时间可进行标准化容量的灌装控制,无需相关技术中的前后称重比较判断和灌装补液等多个工序,降低多工序转换造成的间歇时间长的问题,提高灌装生产连续性,提高生产效率。
8.可选的,所述灌装组件包括设于储液罐出液口的多通旋转接头、与多通旋转接头的输出端对应连通的多个灌装管、设于灌装管输出端的灌装针、设于灌装管和灌装针之间
的灌装控制阀、设于灌装针下方用于瓶体传动的灌装运瓶组件、驱动灌装组件周向运动的旋转支架以及驱动旋转支架旋转的驱动电机,所述灌装运瓶组件设有灌装工位,所述灌装组件安装于旋转支架上并位于灌装工位上方,所述驱动电机、灌装控制阀受控于所述控制主机。
9.通过采用上述技术方案,旋转支架驱动灌装组件周向运动,灌装组件的灌装管、灌装针同步周向运动,因此,在灌装组件对灌装运瓶组件的灌装工位上的瓶体进行灌装时,在前的灌装管、灌装针对瓶体进行跟踪灌装后,能够不受在后的灌装管、灌装针的影响直接周向复位进行下一次跟踪灌装操作,同时,在后的灌装管、灌装针也能够保持正常的跟踪灌装和周向复位,如此循环,无需灌装工位停歇以灌装,而且相对于直线式往返的灌装针在往返过程中前后位置的灌装针相互干涉回转造成的运瓶流速受限现象、造成的大量空瓶失误现象,周向运行的灌装组件提高了灌装组件与灌装运瓶组件的同步效率,圆周式循环跟踪灌装为同步流转跟踪,瓶体流转速度不受灌装针限制,能够实现高速流转灌装,提高生产连续性,提高生产效率。
10.可选的,所述灌装运瓶组件包括转盘、导向板和托瓶轨道,所述转盘安装于旋转支架远离灌装组件的一端上,所述转盘的圆周边上开设有多个用于夹持瓶体的限位槽,所述限位槽为所述灌装工位,所述灌装针与所述限位槽一一对应设置,所述灌装针位于限位槽的上方;位于转盘的圆周外侧设有环绕转盘的所述导向板,所述导向板开有用于进瓶和出瓶的缺口,位于转盘的限位槽的下方还设有所述托瓶轨道,所述托瓶轨道由导向板的进瓶端沿瓶体输送方向延伸至导向板的出瓶端。
11.通过采用上述技术方案,转盘设于旋转支架,旋转支架能够带动转盘和灌装组件同步旋转,即转盘上限位槽与灌装针同步旋转,转盘的每个限位槽都对应一个灌装针,灌装针能够对限位槽夹持传动的瓶体都能进行跟踪灌装,一一对应的位置限制提高灌装精确性,降低灌装至瓶体外的失误操作情况。
12.可选的,所述旋转支架包括上连接盘和下连接盘,所述多通旋转接头设于所述上连接盘,所述上连接盘和下连接盘之间通过多个连接支杆连接,各个连接支杆环形阵列排布,连接支杆与灌装针一一对应,所述灌装管为软管,所述灌装针通过可滑移组件安装于所述连接支杆上,所述转盘设于所述下连接盘,所述下连接盘设有轴向杆,所述驱动电机驱动所述轴向杆转动。
13.通过采用上述技术方案,所述旋转支架上的各个连接支杆支撑各个灌装针保持稳定的灌装状态,而且灌装管为软管,软管具有形变适应性,基于此,灌装针通过滑移组件可以固定于连接支杆的不同高度位置上,实现灌装针和转盘之间的间隙调节,因此,可以适配不同规格尺寸的瓶体的灌装应用,扩大灌装适用范围。
14.可选的,所述可滑移组件包括固定座,固定座上设有用于与连接支杆连接的连接臂,所述连接臂上沿径向开设有多个穿孔,相邻穿孔之间连通开设有开槽,所述连接臂上还设有固定螺栓,所述固定螺栓穿接于开槽的槽壁上,所述固定螺栓穿出开槽槽壁的一端上螺纹连接有螺母;所述固定座通过任一穿孔套接于连接支杆上,所述灌装针安装于所述固定座上。
15.通过采用上述技术方案,连接臂上多个穿孔之间通过开槽连通,穿孔位于与开槽的连通口上具有松紧调节空间,通过固定螺栓和螺母进行螺纹松紧调节配合,在需要调节
连接臂在连接支杆上的位置时,松开固定螺栓,套接于连接支杆上的穿孔松弛,可以滑动连接臂,滑动调节连接臂的位置,达到连接臂在连接支杆上的所需位置时,再将固定螺栓紧固即可,滑移调节操作简单快捷。而且,多个穿孔设置,可以将径向不同位置的穿孔穿接在连接支杆上,进行径向位置的调节,可以调节灌装针对应各个不同规格的瓶体,位于瓶体正上方进行灌装。
16.可选的,所述固定座上还设有固定条,所述固定条上开设有第一夹持凹槽,所述固定座上设有与第一夹持凹槽对应的第二夹持凹槽,所述固定条通过固定螺丝安装于所述固定座上,所述灌装针夹持安装于所述第一夹持凹槽和第二夹持凹槽之间。
17.通过采用上述技术方案,通过相对夹持固定的结构将灌装针安装于固定座上,便于灌装针的安装拆卸,能够夹持于灌装针的不同高度位置上,因此,除了能够实现固定座在连接支杆上的高度位置的粗调节,还能够通过固定条夹持在灌装针的不同高度位置上进行精调节,提高调节准确性,提高规格适配性。
18.可选的,所述进液控制阀、灌装控制阀均为气动隔膜阀。
19.通过采用上述技术方案,采用气动隔膜阀开关速度快,精度高,有利于控制主机对灌装组件的灌装时间的准确控制,提升灌装量的标准化控制准确性。
20.可选的,所所述旋转支架上位于灌装针和灌装运瓶组件之间的位置上设有多个光电传感器,所述光电传感器与灌装运瓶组件的灌装工位一一对应设置,所述光电传感器的检测端朝向限位槽,所述光电传感器与控制主机连接。
21.通过采用上述技术方案,光电传感器能够检测对应的灌装工位上是否有瓶体的进入,在有瓶体进入的时候再反馈至控制主机,控制主机控制对应的灌装针进行灌装操作,实现有瓶灌装无瓶不灌装的效果,减少高速灌装过程中由于高速流转失误限位槽内瓶体缺失造成的灌装失误现象。
22.可选的,还包括压力传感器和氮气供气装置,所述储液罐上开设有进气口,所述进气口上设有进气控制阀,所述进气口与所述氮气供气装置连接;所述压力传感器设于所述储液罐上;所述压力传感器与所述控制主机的数据端连接,所述氮气供气装置受控于控制主机。
23.通过采用上述技术方案,当不再进行补液时,随着灌装进度,储液罐内的液位下降,压力传感器检测灌内压力变化并反馈至控制主机,控制主机控制进气阀和氮气供气装置进行氮气补充,使得储液罐内压力保持恒定,直至储液罐内液体完全灌装完毕,因此,灌装的后期能够通过氮气补充进行压力恒定保持,减少后期液位维持而灌装结束所造成的液体浪费。
24.综上所述,本技术包括以下至少一种有益技术效果:
25.1.通过液位传感反馈进行罐体内液位恒定的控制,实现罐内压差恒定,则通过控制灌装组件的灌装时间可进行标准化容量的灌装控制,无需相关技术中的前后称重比较判断和灌装补液等多个工序,降低工序间隙时间,提高灌装生产连续性,提高生产效率;
26.2.灌装针和转盘同步旋转,转盘的每个限位槽都对应一个灌装针,灌装针能够对转盘夹持传动的瓶体进行跟踪式灌装,进行圆周式循环跟踪灌装;
27.3.灌装针和转盘之间的距离可调,可适用于多规格的瓶体灌装。
附图说明
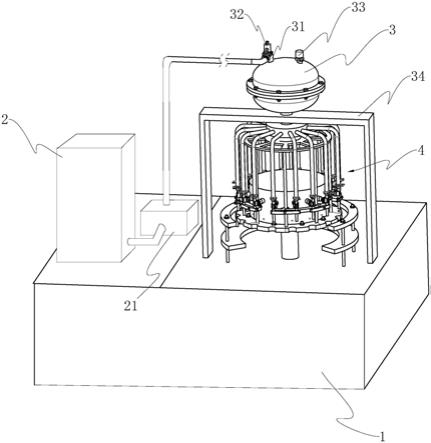
28.图1是本技术实施例1高速灌装机的液位控制组件的结构示意图。
29.图2是本技术实施例1灌装组件的结构示意图。
30.图3是图2中a处的结构放大图。
31.图4是本技术实施例1旋转支架的结构示意图。
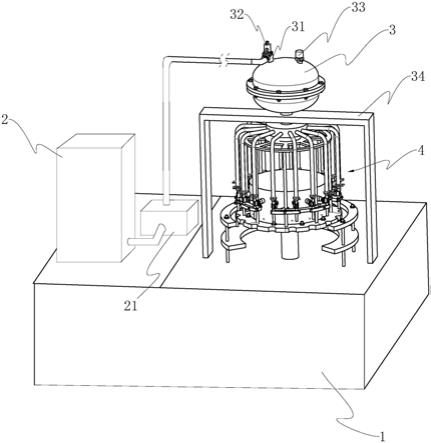
32.图5是本技术实施例2高速灌装机的液位控制组件的结构示意图。
33.附图标记说明:1、工作台;2、原液罐;21、液体输送泵;3、储液罐;31、进液口;32、进液控制阀;33、液位传感器;34、支撑架;35、进气口;36、进气控制阀;37、压力传感器;4、灌装组件;41、多通旋转接头;42、灌装管;43、灌装针;44、灌装控制阀;5、旋转支架;51、上连接盘;52、下连接盘;53、连接支杆;54、可滑移组件;541、固定座;542、固定条;543、连接臂;55、轴向杆;6、转盘;61、限位槽;62、导向板;63、托瓶轨道;7、光电传感器;8、氮气供气装置。
具体实施方式
34.以下结合附图1
‑
5对本技术作进一步详细说明。
35.本技术实施例公开一种高速灌装机的物料液位控制组件。
36.实施例1
37.参照图1,高速灌装机的物料液位控制组件,包括工作台1、设于工作台1上的原液罐2、设于工作台1上的储液罐3、开设于储液罐3上的进液口31、设于进液口31上的进液控制阀32、设于储液罐3上的液位传感器33、开设于储液罐3上的出液口、设于出液口的灌装组件4和控制主机。储液罐3通过支撑架34架设于工作台1的台面上方,进液口31和液位传感器33设于储液罐3的顶部,出液口设于储液罐3的底部;原液罐2的出液口上连接有液体输送泵21,液体输送泵21的出液端和储液罐3的进液口31通过输液管道连接;液位传感器33与控制主机数据端连接,进液控制阀32和液体输送泵21分别受控于控制主机,进液控制阀32采用了气动隔膜阀。
38.参照图2和图3,灌装组件4包括多通旋转接头41、灌装管42、灌装针43和旋转支架5。多通旋转接头41设于储液罐3的出液口上,多通旋转接头41的进液接头与储液罐3的出液口固定连接,多通旋转接头41的出液接头上设有多个出液接口,出液接口通过法兰接头和快装卡箍连接安装灌装管42,灌装管42采用了软管,灌装管42的出液端通过法兰接头和快装卡箍安装连接罐装针,灌装针43上通过法兰连接有灌装控制阀44,灌装控制阀采用了气动隔膜阀,灌装控制阀44分别受控于控制主机。
39.参考图3和图4,旋转支架5包括上连接盘51和下连接盘52,上连接盘51和下连接盘52通过多个连接支杆53连接固定,各个连接支杆53呈环形阵列排布;多通旋转接头41的出液接头安装于上连接盘51上;各个连接支杆53与各个灌装针43分别一一对应设置,灌装针43通过可滑移组件54安装于连接支杆53上,可滑移组件54包括固定座541和固定条542,固定座541上设有三个连接臂543,连接臂543上开设有第一穿孔和第二穿孔,第一穿孔和第二穿孔之间开设有开槽,开槽连通第一穿孔和第二穿孔,连接臂543上开设有固定螺栓,固定螺栓穿接于开槽的槽壁上,固定螺栓穿出开槽槽壁的一端上螺纹连接有螺母,固定座541通过第一穿孔或者第二穿孔套接于连接支杆53上,一个固定座541通过三个连接臂543可以直接穿接于三个连接支杆53上;两个固定条542对称的设于固定座541远离连接支杆53的一端
端面上,固定条542上对称开设有两个第一夹持凹槽,固定座541上设有与第一夹持凹槽对应的第二夹持凹槽,固定条542通过固定螺丝安装于固定座541上,灌装针43夹持安装于第一夹持凹槽和第二夹持凹槽之间,固定座541上通过两个固定条542可以同时夹持四个灌装针43;下连接盘52的圆周边上环绕设有转盘6,转盘6是由多个转盘6叶片拼接构成的环形转盘6,转盘6叶片通过固定螺丝固定与下连接盘52上,转盘6的圆周边上开设有用于夹持瓶体的限位槽61,限位槽61与灌装针43一一对应设置,限位槽61位于灌装针43的正下方;位于转盘6的圆周外侧设有环绕转盘6的导向板62,导向板62和限位槽61之间形成瓶体的流转通道,导向板62开有用于进瓶和出瓶的缺口,导向板62和限位槽61共同对瓶体进行夹持,瓶体顺着导向板62由进瓶端向出瓶端流转;位于限位槽61的下方还设有托瓶轨道63,托瓶轨道63由导向板62的进瓶端沿瓶体输送方向延伸至导向板62的出瓶端;下转盘6上设有穿过工作台1的轴向杆55,轴向杆55设有齿轮,所述齿轮与驱动电机连接,驱动电机能够驱动轴向杆55带动旋转支架5转动;所述驱动电机受控于控制主机。
40.参考图3,旋转支架5上位于灌装针43和转盘6之间的位置上设有多个光电传感器7,光电传感器7与转盘6的限位槽61一一对应设置,光电传感器7的检测端朝向限位槽61,所述光电传感器7与控制主机连接。
41.实施例1的实施原理为:液位传感器33用于检测储液罐3内液体的液位参数,并将检测结果反馈至控制主机,控制主机控制液体输送泵21和进液控制阀32对储液罐3进行补液,以保证在所有瓶体灌装完成前整个灌装过程中液位保持恒定,保持储液罐3灌内至灌装组件4输出口处的压力差恒定,控制主机通过控制灌装组件4的灌装时间可进行标准化容量的灌装控制;灌装过程中,驱动电机驱动旋转支架5的轴向杆55转动,进而带动旋转支架5转动,与旋转支架5安装的多通旋转接头41、灌装针43、转盘6实现了同步转动,有瓶体由导向板62的进瓶端进入时,瓶体进入转盘6的限位槽61内,该限位槽61对应的光电传感器7检测到瓶体传送信号至控制主机,控制主机控制该限位槽61对应的灌装针43上的灌装控制阀开启,灌装针43对瓶体进行灌装,灌装时间达成后,控制主机控制灌装控制阀关闭,灌装过程中灌装针43、瓶体保持同步跟踪传动,瓶体由导向板62的出瓶端流出时,该限位槽61对应的光电传感器7发送信号至控制主机,控制主机进行一次灌装完成的记录,同时该限位槽61对应的灌装针43是随着转盘6做圆周运动,灌装针43和限位槽61同步继续圆周转动至进瓶端,继续下一次灌装;多个灌装针43和多个限位槽61如前所述的同步跟踪灌装,灌装过程无需间歇停顿,灌装生产连续性高。
42.实施例2
43.本实施例和实施例1的区别在于:参考图5,还包括压力传感器37和氮气供气装置8,储液罐3上开设有进气口35,进气口35上设有进气控制阀36,进气控制阀36采用的气动隔膜阀,进气口35与氮气供气装置8连接;压力传感器37设于储液罐3上;压力传感器37与控制主机的数据端连接,氮气供气装置8受控于控制主机。
44.实施例2的实施原理为:根据灌装生产所需的整体灌装量设计,当灌装后期,补液灌装量已达灌装量的所需阈值时,不再进行补液,随着灌装进度,储液罐3内的液位下降,压力传感器37检测灌内压力变化并反馈至控制主机,控制主机控制进气阀和氮气供气装置8进行氮气补充,使得储液罐3内压力保持恒定,直至储液罐3内液体完全灌装完毕,因此,灌装的后期能够通过氮气补充进行压力恒定保持。
45.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。