1.本实用新型涉及巡检机器人技术领域,具体是磁吸式挂轨运动机构。
背景技术:
2.随着科技与智能化的发展,巡检机器人可以把人从危险、恶劣的工作环境和繁琐的工作任务中解放出来,并且能够克服和弥补人工巡检存在的一些缺陷和不足,能够提升大型水电站、矿场,炼钢厂等危险场所的安全水平、经济水平和智能化水平。
3.目前,现有的巡检机器人大都是在应用场景中布设轨道,然后再将机器人挂设在轨道上,布设轨道时,一般是利用悬挂件将轨道布设在半空或通过支撑件支撑在半空,轨道由若干轨道单元连接而成,机器人与轨道之间靠压力产生的摩擦力行走,易磨损轨道;同时,在相邻两个轨道单元的连接处极易出现连接错位的问题,机器人在行走至相邻两个轨道单元的连接处以及悬挂件与轨道的悬挂点处或支撑件与轨道的支撑点处时,机器人会发生震动,会导致巡检画面不清晰;此外,由于在大型水电站、矿场,炼钢厂等危险场所的环境较为恶劣,机器人的震动较大或较为频繁时,易导致机器人运动机构轴承的损坏,使得机器人的使用寿命降低。
技术实现要素:
4.本实用新型的目的在于解决现有技术中存在的问题,提供磁吸式挂轨运动机构,解决了机器人过轨道连接时震动过大,导致的轴承损坏及画面巡检震动不清晰的问题,解决了现有机器人与轨道直接靠压力产生摩擦力行走时所带来的轨道磨损问题,能够提高使用寿命。
5.本实用新型为实现上述目的,通过以下技术方案实现:
6.磁吸式挂轨运动机构,包括机器人、轨道,
7.所述机器人包括机架,所述机架上设有行走轮,所述行走轮的数量至少为两个,且行走轮的轴心线水平布置,所述机架上设有用于带动行走轮转动的动力装置,所述机架上水平设有纵向磁吸装置;
8.所述机架上设有导向轮,导向轮的数量至少为两个,且所述导向轮的轴心线竖直布置,所述机架上竖直设有横向磁吸装置;
9.所述轨道为铁磁体轨道,所述轨道上设有与行走轮相适应的行走部,所述行走轮、纵向磁吸装置均位于行走部的上侧,且行走轮与行走部抵接,纵向磁吸装置与行走部之间留有一定的间隙;
10.所述轨道上设有与导向轮相适应的导向部,所述横向磁吸装置、导向轮均位于导向部的左侧或右侧,且导向轮与导向部抵接,横向磁吸装置与导向部之间留有一定的间隙。
11.优选的,每个所述行走轮上均固定设有支撑轴,所述支撑轴与机架转动连接,所述动力装置为电机,所述电机与其中一个支撑轴以及相邻两个支撑轴之间均通过同步带传动连接。
12.优选的,所述行走轮的数量为两个,所述纵向磁吸装置位于两个行走轮之间。
13.优选的,所述导向轮的数量为两个,且在每个所述导向轮的一侧均设有一个横向磁吸装置。
14.优选的,所述纵向磁吸装置、横向磁吸装置均包括衔铁、钕磁铁。
15.优选的,所述轨道上设有悬挂架,所述悬挂架通过螺栓与轨道连接,所述导向轮包括转轴、上轮、下轮,所述上轮、下轮均安装在转轴上,且所述上轮位于螺栓的上侧,所述下轮位于螺栓的下侧。
16.优选的,所述轨道的横截面呈l型。
17.优选的,所述机架包括底板、竖直设置在底板上的立板,所述行走轮安装在立板上,所述导向轮安装在底板上。
18.优选的,所述机架上设有防脱轨装置。
19.优选的,所述防脱轨装置包括安装在机架上的防脱轨轮,所述防脱轨轮位于轨道远离导向轮的一侧,且防脱轨轮与导向轮的中心线平行,所述导向轮的数量为两个,两个所述导向轮与所述防脱轨轮分别位于同一个三角形的三个顶点处,且所述防脱轨轮与两个导向轮之间的距离相同。
20.对比现有技术,本实用新型的有益效果在于:
21.本实用新型的纵向磁吸装置、横向磁吸装置的磁力隔空作用在轨道上,使得机器人能够吸附在轨道上,再结合机器人的自重,能够避免机器人从轨道上掉落,能够使行走轮、导向轮与轨道紧密抵接,由动力装置带动行走轮转动即可使机器人沿着轨道移动;利用机器人自重和纵向磁吸装置、横向磁吸装置所产生的磁力,将整个机器人牢牢的压在轨道上行驶,能够避免在行驶至高低不平处产生的震动导致机器人离开轨道上表面的情况;导向轮与横向磁吸装置旨在及时导正机器人的运动轨迹,使其按照提前设计好的轨道运动,以及在经过弯道时不会驶向一边,导致卡住;铁磁体轨道比普通道轨结构简单,不用弹簧装置,弹簧使用寿命是有限,需要定期维护,本实用新型的铁磁体轨道能够减少设备的维护成本、降低设备的故障率;同时本实用新型只用到了一侧的导向轮、一条轨道,可以很好的避免经过连接处、支撑点或者悬挂点时所产生的巨大冲撞,减小机器人的震动,保证机器人的摄像画面的稳定,提高了机器人的轴承的寿命;此外,纵向磁吸装置、横向磁吸装置的磁力可以隔空作用在轨道上,加上采用单侧轨道,可以很好的避免与轨道产生更多直接的摩擦,解决了轨道的磨损切割问题。
附图说明
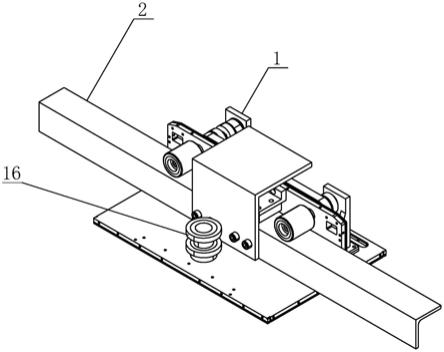
22.附图1是本实用新型的立体结构示意图;
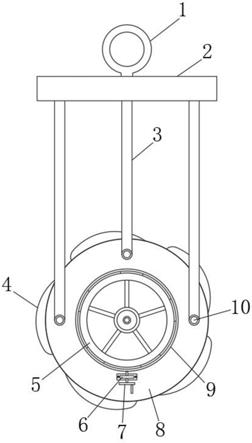
23.附图2是本实用新型的侧视图;
24.附图3是机器人的立体结构示意图之一;
25.附图4是机器人的立体结构示意图之二;
26.附图5是轨道的结构示意图;
27.附图6是导向轮的结构示意图。
28.附图中标号:1、机器人;11、机架;12、行走轮;13、纵向磁吸装置;14、导向轮;141、转轴;142、上轮;143、下轮;15、横向磁吸装置;16、防脱轨轮;2、轨道;21、行走部;22、导向
部;23、悬挂架;24、螺栓;3、动力装置。
具体实施方式
29.下面结合具体实施例,进一步阐述本实用新型。应理解,这些实施例仅用于说明本实用新型而不用于限制本实用新型的范围。此外应理解,在阅读了本实用新型讲授的内容之后,本领域技术人员可以对本实用新型作各种改动或修改,这些等价形式同样落于本技术所限定的范围。
30.实施例:如附图1
‑
6,本实用新型所述是磁吸式挂轨运动机构,包括机器人 1、轨道2。
31.所述机器人1包括机架11,所述机架11上设有行走轮12,所述行走轮12 的数量至少为两个,且行走轮12的轴心线水平布置,所述机架11上设有用于带动行走轮12转动的动力装置3,所述机架11上水平设有纵向磁吸装置13。
32.优选的,为了保证机器人移动的稳定性,所述行走轮12的数量为两个,两个行走轮12分别位于机架11的前后两端,所述纵向磁吸装置13位于两个行走轮12之间。
33.优选的,为了提高机器人的动力,防止机器人的行走轮打滑,每个所述行走轮12上均固定设有支撑轴,支撑轴与行走轮12之间采用一体式结构,或者支撑轴与行走轮12键连接,所述支撑轴通过轴承与机架11转动连接,在机架 11上设有与轴承相适应的安装位,所述动力装置3为电机,所述电机与其中一个支撑轴以及相邻两个支撑轴之间均通过同步带传动连接,在其中一个支撑轴上安装有两个同步轮,其它支撑轴和电机的输出轴上均安装有一个同步轮,利用一个电机同时带动多个行走轮12转动,能够提高机器人的行走动力,防止机器人在轨道上打滑。
34.所述机架11上设有导向轮14,导向轮14通过轴承与机架11转动连接,导向轮14的数量至少为两个,且所述导向轮14的轴心线竖直布置,所述机架11 上竖直设有横向磁吸装置15。
35.优选的,为了保证机器人导向的稳定性,所述导向轮14的数量为两个,两个导向轮14分别位于机架11的前后两端,且在每个所述导向轮14的一侧均设有一个横向磁吸装置15。
36.所述轨道2为铁磁体轨道,轨道2整体可采用铁磁性材料制作,也可在非铁磁性材料的轨道主体上镶嵌铁磁性材料。
37.所述轨道2上设有与行走轮12相适应的行走部21,所述行走轮12、纵向磁吸装置13均位于行走部21的上侧,且行走轮12与行走部21抵接,纵向磁吸装置13与行走部21之间留有一定的间隙,纵向磁吸装置13与行走部21不接触,行走部21上的连接螺栓等连接部件不会对纵向磁吸装置13产生干涉,纵向磁吸装置13的磁力隔空作用在行走部21上,再结合机器人的自重,能够使得机器人1吸附在轨道2上,能够使行走轮12与行走部21紧密抵接;
38.所述轨道2上设有与导向轮14相适应的导向部22,所述横向磁吸装置15、导向轮14均位于导向部22的左侧或右侧,且导向轮14与导向部22抵接,横向磁吸装置15与导向部22之间留有一定的间隙,导向部22上的连接螺栓等连接部件不会对横向磁吸装置15产生干涉,横向磁吸装置15的磁力隔空作用在导向部22上,使得机器人1能够吸附在轨道2上,能够使导向轮14与导向部 22紧密抵接,再结合机器人的自重和纵向磁吸装置13的磁力,能够避
免机器人 1从轨道2上掉落。
39.优选的,为了降低轨道的成本,所述轨道2的横截面呈l型,轨道2可采用角钢,行走部21与导向部22垂直,行走轮12、纵向磁吸装置13位于角钢的上侧,导向部22和横向磁吸装置15位于角钢的内侧。
40.在使用时,由动力装置3带动行走轮12转动,即可使机器人1沿着轨道2 移动;利用机器人1的自重、纵向磁吸装置13、横向磁吸装置15,将整个机器人1牢牢的压在轨道2上行驶,能够避免在行驶至高低不平处产生的震动导致机器人离开轨道上表面的情况;导向轮14与横向磁吸装置15旨在及时导正机器人1的运动轨迹,使其按照提前设计好的轨道运动,以及在经过弯道时不会驶向一边,导致卡住;同时本实用新型只用到了一侧的导向轮14、一条轨道2,可以很好的避免经过连接处、支撑点或者悬挂点时所产生的巨大冲撞,减小机器人的震动,保证机器人的摄像画面的稳定,提高了机器人的轴承的寿命;此外,纵向磁吸装置13、横向磁吸装置15的磁力可以隔空作用在轨道上,加上采用单侧轨道,可以很好的避免与轨道产生更多直接的摩擦,解决了轨道的磨损切割问题。
41.进一步的,为了保证机器人行驶的稳定性,所述纵向磁吸装置13、横向磁吸装置15均包括衔铁、钕磁铁,能够提供强磁力,保证机器人1牢牢的吸附在轨道2上,保证机器人行驶的稳定性,纵向磁吸装置13、横向磁吸装置15也可采用电磁铁。
42.优选的,为了免于悬挂点对机器人行走的影响,所述轨道2上设有悬挂架 23,所述悬挂架23通过螺栓24与轨道2连接,可在导向轮14上设置与螺栓24 上的螺母相适应的避让槽,进一步的,所述导向轮14包括转轴141、上轮142、下轮143,所述上轮142、下轮143均安装在转轴141上,且所述上轮142位于螺栓24的上侧,所述下轮143位于螺栓24的下侧。
43.优选的,为了提高机器人行驶的稳定性,所述机架11包括底板、竖直设置在底板上的立板,所述行走轮12、纵向磁吸装置13、横向磁吸装置15均安装在立板上,所述导向轮14安装在底板上,立板在底板上的位置应保证在将机器人1挂在轨道2上时,机器人1的重力平衡,不会出现一端倾斜的现象。
44.优选的,为了保证本实用新型运行时的稳定性,所述机架11上设有防脱轨装置,能够防止机器人1脱落。
45.进一步的,所述防脱轨装置包括安装在机架11上的防脱轨轮16,防脱轨轮 16的结构可采用与导向轮14相同的结构,所述防脱轨轮16位于轨道2远离导向轮14的一侧,且防脱轨轮16与导向轮14的中心线平行,可以防止意外施加的侧向力导致机器人1脱轨,轨道2位于防脱轨轮16与导向轮14之间,防脱轨轮16与轨道2之间留有一定的间隙,该间隙可设置为8mm,可以兼容轨道制作误差,机器人1正常运行时,防脱轨轮16不与轨道2接触,采用一个防脱轨轮16能够有效减小机构的转弯半径,所述导向轮14的数量为两个,两个所述导向轮14与所述防脱轨轮16分别位于同一个三角形的三个顶点处,且所述防脱轨轮16与两个导向轮14之间的距离相同,能够有效防止机器人1意外受到不对称侧向力导致机器人1跑偏和脱轨,在使用过程中,当机器人1受到偏一端的侧向力时候,防脱轨轮16充当旋转中心,并与导向轮14相互作用,卡住轨道2,防止跑偏和脱轨。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。