1.本实用新型涉及一种抬钳,具体涉及一种柱状重物搬运抬钳。
背景技术:
2.在石油生产领域,基于油井结构及其特定的生产方式,钻采作业中大量使用圆柱形外观的生产工具和测井仪器,生产中难免要对这些柱状重物进行搬抬运移,虽然油井钻机上配套有多种起升装置,生产现场也配备有多种运载车辆,但是,在许多特定生产环境和生产工艺中一些生产工具和测井仪器还是需要由人工进行搬运操作,这既有环境条件的制约,也有工艺实施的要求,众所周知,柱状重物普遍都缺少有利的握持点,人工徒手搬运稳定性难以得到保证,而且劳动强度很大,工作效率不高,特别是有些精密的测井仪器一旦失手跌落地面将会对其测量精度造成很大的不利影响,更油田生产带来不必要的损失,在实际生产中,人们在对柱状重物的搬运过程中,有时也会借助一些简易工具或者简单装置,但这些简易工具和简单装置都缺乏出必要的集成度和广泛的通用性,结构粗放,局限性大,都没有得到较为广泛的推广使用,柱状重物搬运劳动效率低强度大的问题始终没有得到充分改善,因此,有必要对柱状重物的搬运工具进行改进和完善,提高柱状重物搬运的稳定性和安全性。
技术实现要素:
3.本实用新型的目的是,提供一种柱状重物搬运抬钳,提高柱状重物进行搬运的稳定性、安全性、以及搬运工作效率,减小搬运劳动强度。
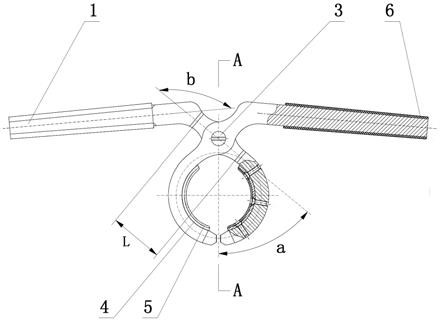
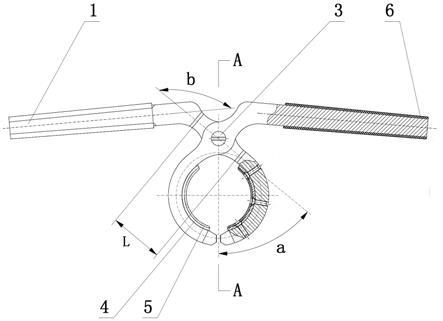
4.一种柱状重物搬运抬钳,包括:钳杆;所述钳杆杆体上分别设置有钳口部、配合部和手柄部,所述钳口部设置在所述钳杆的一端,为圆弧形状,内侧具有半圆形钳口,所述手柄部设置在所述钳杆的另一端,为直杆体,所述配合部设置在所述钳口部和所述手柄部之间,为过渡型直杆,与所述钳口部的钳口开口径线成角度a,与所述手柄部的直杆体成角度b,所述配合部杆体上分别开设有铰接孔,以及开口朝向一侧、深度为1/2杆体厚度、长度为l的配合槽,其中,所述铰接孔对应设置于所述钳口开口径线的延长线上;2条所述钳杆保持所述钳口相对,在所述配合槽开口相对交叉叠置,并在所述铰接孔利用铰轴销相互铰接,使2条所述钳杆之间可沿所述铰轴销相对转动,所述配合槽的长度l限定了二者之间的相对转角范围,并在限定的所述转角范围内控制2条所述钳杆钳口的张开或者闭合,张开时可向2个所述钳口中导入拟搬运柱状重物,闭合时可由2个所述钳口对所述柱状重物实施配合夹持, 所述配合槽的深度设置为1/2杆体厚度,可使2条所述钳杆的所述钳口部和所述手柄部在分别对称布设在同一平面上,保证手柄搬抬施与力、以及钳口夹持作用力的平衡性。
5.进一步,优选在2条所述钳杆钳口的内侧面上设置有紧箍套,所述紧箍套的宽度大于所述钳口的宽度,以增大所述钳口与所述柱状重物的接触面积,提高对所述柱状重物加持搬运的稳定性。
6.再进一步,优选在所述紧箍套的内侧表面上敷设有橡胶垫,以防止夹持搬运柱状
重物时所述柱状重物沿所述钳口轴向产生滑动,进一步提高对所述柱状重物加持搬运的稳定性。
7.更进一步,优选在所述所述手柄部的直杆体上安装有防滑套,提高所述直杆体的表面摩擦力,提高操作者持握的可靠性,保证搬运操作的安全性。
8.所述一种柱状重物搬运抬钳,还优选所述配合部过渡型直杆与所述钳口部的钳口开口直径所成角度a为45
°
~55
°
,与所述手柄部的直杆体所成角度b为130
°
~140
°
,通过所述角度 a与所述角度b的组合设置,使2个所述钳口在充分张开时,所述手柄部直杆体的端头不低于所述钳口的下端沿,保证水平面上的柱体重物能够导入所述钳口夹持空间之中,同时,在2个所述钳口完全闭合时,所述手柄部直杆体的端头不高于铰接2个所述钳口的所述铰轴销所处高度,使所述手柄部的直杆体保持朝向外侧的倾斜角度,克服受柱状重物作用所述手柄部直杆体易从握持手掌中滑脱的趋势,提高搬运握持的稳定性。
9.本实用新型的有益效果是,针对油田生产领域圆柱形外观生产工具和测井仪器应用较多,提供一种柱状重物的专用搬运工具,采用标准的钳杆构件组合制备,结构简单,使用方便,成本较低,特别是在钳杆上优化设计有钳口部、配合部和手柄部结构,保证手柄部搬抬直杆体施与力、以及钳口部钳口夹持作用力的平衡性,应用于实际生产当中,能够提高柱状重物搬运的稳定性、安全性、以及搬运工作效率,减小搬运劳动强度。
附图说明
10.图1为钳杆结构示意图。
11.图2为柱状重物搬运抬钳结构主视图。
12.图3为图2中a
‑
a线剖视图。
13.图4为柱状重物搬运抬钳结构俯视图。
14.图5为复合结构柱状重物搬运抬钳结构主视图。
15.图6为复合结构柱状重物搬运抬钳结构俯视图。
具体实施方式
16.下面结合具体实施例及其附图,对本实用新型请求保护的技术方案做进一步描述。
17.实施例1
18.一种柱状重物搬运抬钳,由2条钳杆1构成;如图1所示,所述钳杆1杆体上分别设置有钳口部10、配合部20和手柄部30,所述钳口部10设置在所述钳杆1的一端,内侧具有半圆形钳口,所述手柄部30设置在所述钳杆1的另一端,为直杆体的搬抬手柄,所述配合部20设置在所述钳口部10和所述手柄部30之间,为过渡型直杆,与所述钳口部10的钳口开口径线所成角度a为50
°
,与所述手柄部30的直杆体所成角度b为135
°
,所述配合部20的杆体上分别开设有铰接孔2和配合槽,所述铰接孔设置于所述钳口开口径线的延长线上,所述配合槽侧向开口,深度为所述钳杆1杆体厚度的1/2,具有一定长度为l,2条所述钳杆1,如图2至图4所示,在所述配合槽开口处相对交叉叠置,并在所述铰接孔2利用铰轴销3相互铰接,在2条所述钳杆1钳口的内侧面上设置有紧箍套4,所述紧箍套4的宽度大于所述钳口宽度的2倍,在所述紧箍套4的内侧表面上敷设有橡胶垫5,同时,在所述手柄部30的直杆体上安装有防滑
套6。
19.本实施例所述一种柱状重物搬运抬钳为柱状重物手工搬运的专用工具,使用时,分别握持2个钳杆1的手柄部30使2个所述钳杆1以铰轴销3为轴心相对转动,控制2个所述钳杆1钳口部10的钳口相互张开,将拟搬运柱状重物导入张开的钳口之中,然后反向转动2个所述钳杆1,控制所述钳口部10的钳口闭合箍紧在所述柱状重物上,同时握持2个钳杆1的手柄部30,平衡施力提升并平稳柔缓移动,可将所述柱状重物手工搬移到目标位置处,在搬移过程中,克服所述柱状重物重力分别作用于2个所述钳杆1手柄部30的作用力,依杠杆作用原理可转化为所述钳口部10的钳口夹持力,使所述柱状重物搬运抬钳具有稳定、可靠的夹持搬运能力。
20.使用所述一种柱状重物搬运抬钳进行柱状重物搬运,重量较轻时,可由1人分别握持2个所述钳杆1的手柄部30实施操作,当重量较重时,可由2人分别握持2个所述钳杆1的手柄部30实施操作,而对于杆体长度较大的柱状重物,搬运时所述柱状重物上均匀分布使用多个所述一种柱状重物搬运抬钳,由多人配合实施搬运操作,而且,所述一种柱状重物搬运抬钳采用标准的钳杆构件组合制备,具有良好的集成度,应用范围不仅只局限于油田生产领域,在各生产领域的柱状重物搬运生产环节也具有广泛的通用性。
21.实施例2
22.一种复合结构柱状重物搬运抬钳,如图5和图6所示,由钳杆11、第一连接轴杆12和第二连接轴杆13所构成;所述钳杆11杆体上分别设置有钳口部、配合部和手柄部,所述钳口部设置在所述钳杆11的一端,内侧具有半圆形钳口,所述手柄部设置在所述钳杆11的另一端,为直杆体,端头上开设有第二轴杆孔,所述配合部设置在所述钳口部和所述手柄部之间,为过渡型直杆,与所述钳口部的钳口开口径线所成角度为50
°
,与所述手柄部的直杆体所成角度为135
°
,所述配合部的杆体上开设有第一轴杆孔和配合槽,所述第一轴杆孔设置于所述钳口开口径线的延长线上,所述配合槽侧向开口,深度为所述钳杆11杆体厚度的1/2,具有一定长度,每2条所述钳杆11在所述配合槽开口处相对交叉叠置组成1个钳杆组,其中,组成所述钳杆组的两个所述钳杆11上的所述第一轴杆孔相互重合,2个所述钳杆组平行设置,所述第一轴杆孔分别铰接安装在所述第一连接轴杆12的两端,两个所述第二轴杆孔分别对应铰接安装在2条所述第二连接轴杆13的两端,形成多组钳杆的同步复合结构,在所述钳杆11钳口的内侧面上设置有紧箍套14,所述紧箍套14的宽度大于所述钳口宽度的2倍,在所述紧箍套14的内侧表面上敷设有橡胶垫15,同时,在所述第二连接轴杆13的直杆体上安装有防滑套16。
23.所述一种复合结构柱状重物搬运抬钳,采用与搬运柱状重物轴向平行的第二连接轴杆13作为手持杆体,适用于多人分别在柱状重物两侧配合进行搬抬运移,采用相距一定跨度的2个钳杆组对所述柱状重物进行同步夹持方式,使所述柱状重物的搬抬运移具有更好的平衡性和稳定性,使用时,所述柱状重物两侧的操作人员分别握持对应侧的所述第二连接轴杆13,使组成所述钳杆组的2个所述钳杆11以第一连接轴杆12为轴心分别同步相对转动,控制2个所述钳杆组钳口部的钳口同步相互张开,将拟搬运柱状重物同步导入2个张开的钳口之中,然后反向转动2个所述第二连接轴杆13,控制2个所述钳杆组所述钳口部的钳口同步闭合箍紧在所述柱状重物上,操作人员分别握持2个第二连接轴杆13,平衡施力提升并平稳柔缓移动,可将所述柱状重物手工搬移到目标位置处。
24.此外,对于较长的柱状重物,本实施例还可扩展设置2个以上钳杆组串接于所述第一连接轴杆12和所述第二连接轴杆13之上,形成更多的施力夹持点,进一步提高柱状重物搬运的安全性和可靠性。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。