1.本实用新型涉及物流运输车辆技术领域,特别涉及一种载物车。
背景技术:
2.随着电商及物流行业的迅猛发展,货物物流量正在逐步增加,需要人员进行货物转运的应用场景也大大增加。目前,用于货物转运的载物车多为人工推拉式,而且货物的搬运多为人工搬运,这种方式不仅效率低下,且操作人员的工作强度也较大,长时间下来不仅会对人体带来伤害,同时由此导致的安全事故的概率也会增加。
技术实现要素:
3.有鉴于此,本实用新型旨在提出一种载物车,以可降低操作人员的工作强度。
4.为达到上述目的,本实用新型的技术方案是这样实现的:
5.一种载物车,包括设有载物平台的车体,设于所述车体上的行走机构,与所述行走机构连接的控制机构,以及与所述控制机构连接的电源机构,所述控制机构中具有自动跟随模块,所述自动跟随模块可链接外部信号源,并由所述控制机构控制所述行走机构跟随所述外部信号源移动;其中,于所述车体的一端设有可承接外部推拉操纵以驱使所述载物车移动的扶手,且:
6.所述行走机构具有固设于所述车体上的若干对转向驱动部,以及分别连接于各所述转向驱动部上的设有轮毂电机的行走轮;
7.或者,所述行走机构具有位于所述车体一端的一对设有轮毂电机的行走轮,并相对于设有所述行走轮的一端,于所述车体的另一端设有一对万向轮。
8.进一步的,所述控制机构具有以识别所述载物车移动方向上障碍物的避障模块。
9.进一步的,所述转向驱动部采用转向电机。
10.进一步的,所述行走轮通过悬架结构连接于所述转向电机上。
11.进一步的,所述车体上设有与所述控制机构连接的升降机构,所述载物平台由所述升降机构驱使而可升降地设于所述车体上。
12.进一步的,所述载物平台的上升高度在20
‑
100mm之间。
13.进一步的,所述扶手的承接所述外部推拉操纵的部位的高度在900
‑
1050mm之间。
14.进一步的,于所述载物平台的台面上设有防滑结构和/或货物固定结构。
15.进一步的,所述扶手可折叠倒置于所述载物平台上。
16.进一步的,所述扶手可拆卸地设于所述车体上。
17.相对于现有技术,本实用新型具有以下优势:
18.本实用新型所述的载物车通过行走机构,以及控制机构中自动跟随模块的设置,可使得载物车自动跟随操作人员完成运输过程,无需操作人员推拉载物车,从而能够降低操作人员的工作强度。
19.此外,本实用新型中避障模块的设置,可利于载物车自动跟随的安全性,载物平台
的可升降设计,可便于实现货物的自动装卸,且也能够提高载物车的越障能力和爬坡能力。而防滑结构与货物固定结构的设置,可增加货物于载物平台上装载的稳定性,扶手的可折叠设计或者可拆卸设计,则能够利于载物车的收纳和运输。
附图说明
20.构成本实用新型的一部分的附图用来提供对本实用新型的进一步理解,本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。在附图中:
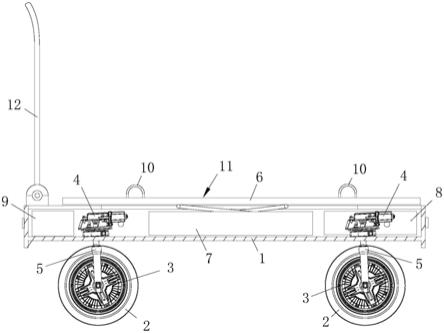
21.图1为本实用新型实施例所述的载物车的结构示意图;
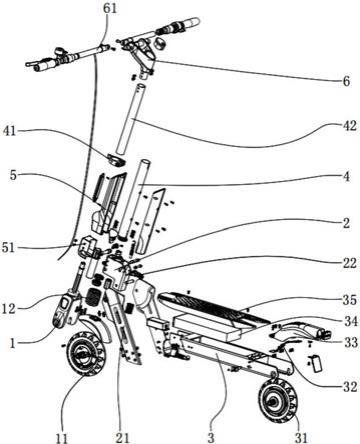
22.图2为本实用新型实施例所述的扶手折叠时的示意图;
23.附图标记说明:
24.1、车体;2、行走轮;3、轮毂电机;4、转向电机;5、悬架结构;6、载物平台;7、升降机构;8、电源机构;9、控制机构;10、固定环;11、防滑层;12、扶手。
具体实施方式
25.需要说明的是,在不冲突的情况下,本实用新型中的实施例及实施例中的特征可以相互组合。
26.在本实用新型的描述中,需要说明的是,若出现“上”、“下”、“内”、“外”等指示方位或位置关系的术语,其为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,若出现“第一”、“第二”等术语,其也仅用于描述目的,而不能理解为指示或暗示相对重要性。
27.下面将参考附图并结合实施例来详细说明本实用新型。
28.本实施例涉及一种载物车,其作为货物的运输载体,可用于诸如写字楼、cbd商圈中进行办公用品、食品、快递等物品的搬运,同时,其也可用于例如工业园区、仓库等工业厂区内物品的搬运。该载物车可替代现有的手推板车、地牛等运载工具,能够达到降低操作人员劳动强度,提升搬运效率及搬运安全性的效果。
29.如图1中所示的,本实施例的载物车在整体构成上包括设置有载物平台6的车体1,设于车体1上的行走机构,与行走机构连接的控制机构9,以及与控制机构9连接的电源机构8。
30.其中,行走机构在结构上具有若干对固设于车体1上的转向驱动部,以及分别连接于各转向驱动部上的设有轮毂电机3的行走轮2。而且作为一种示例性实施形式,本实施例的转向驱动部可采用固定于车体1中的转向电机4,行走轮2则可通过悬架结构5连接于转向电机4上,以不仅可实现行走轮2与转向电机4之间的连接,且也能够起到一定的减震效果。
31.本实施例的转向电机4、悬架结构5和具有轮毂电机3的行走轮2均采用适宜的现有部件便可。此外,除了采用转向电机4,当然转向驱动部也可采用其它可实现行走轮2转动设置,并能够驱使行走轮2转向的现有结构。
32.此外,除了使得行走机构采用上述的结构形式,作为另一种可行的实施方式,本实施例的行走机构也可为具有位于车体1一端的设有轮毂电机3的行走轮2,且此时,相对于设
有行走轮2的一端,于车体1的另一端则设置万向轮。各端的行走轮2与从动轮均为相对布置于两侧的一对。而在使用时,位于一端的行走轮2即作为驱动轮,并利用该端的两个行走轮2之间的差速,能够实现车体1的行驶及转向。
33.本实施例中,控制机构9采用现有控制器部件,并基于载物车的功用采用相应的现有控制模块便可。而在控制机构9所包含的模块中,其具有自动跟随模块,该自动跟随模块即可链接外部信号源,并由此能够通过控制机构9控制行走机构跟随外部信号源移动,以实现载物车的自动跟随功能。
34.在具体实施时,以上自动跟随模块同样采用现有智能车自动跟随系统即可,且在设置有自动跟随模块的基础上,为保证载物车在自动跟随时移动的安全性,本实施例在控制机构9中也可设置用以识别载物车移动方向上障碍物的避障模块。该避障模块亦直接采用现有部件便可,且一般地其会包含布置于车体1上的若干超声波传感器和红外距离传感器等传感结构,以及集成于控制机构9中的电路模块。
35.本实施例中,载物平台6可为直接固定在车体1上,不过,为提高本实施例载物车的功用性,以利于进行货物的装卸,并且也能够提高载物车的越障及爬坡能力,作为一种优选实施形式,在车体1上则可设置与控制机构9连接的升降机构7,载物平台6便具体为由升降机构7驱使而可升降地设置于车体1上。
36.此时,上述升降机构7可采用现有的电动、气动或液压驱动等结构形式的升降驱动部件,且在为电动形式时,其例如可采用直线电机,在为气动形式时,可采用气缸,在为液压驱动时则可采用液压缸。同时,以上所采用直线电机、气缸或液压缸中,载物平台6与车体1之间均可设置导向结构,以保证其升级平稳性。另外,在采用上述各类型结构时,本实施例的升降机构7例如还可为采用现有的剪叉机构,以配合于直线电机、气缸或液压缸对剪叉机构的驱使,而实现连接于剪叉机构顶端的载物平台6的升降。
37.需要指出的是,本实施例载物平台6的上升高度一般在20
‑
100mm之间,并例如可为20mm、25mm、30mm、40mm、46mm、50mm、55mm、60mm、68mm、70mm、72mm、80mm、90mm、95mm或100mm。若载物平台6上升的太高,会导致整车质心偏高,容易造成行车不稳,而载物平台6上升的太少,则又容易造成载物车越障能力及爬坡能力较差。
38.为提升装载货物的稳定性,本实施例在载物平台6的台面上也可设置防滑结构与货物固定结构中的至少一种。而且在具体实施中,所述防滑结构即例如可采用设置在载物平台6台面上的防滑层6,或者其也可是构造于载物平台6的台面上的防滑槽等结构。所述的货物固定结构则采用固定于载物平台6上的固定环10,亦或是固定钩等结构便可。
39.本实施例中,在车体1的一端还设置有可承接外部推拉操纵而驱使载物车移动的扶手12。通过该扶手12的设计,便可在载物车的电源电量不足,或者是载物车爬坡能力不足时,手动推动或拉动载物车,以保障载物车运输功能的实现。当然,除了在电量不足以及爬坡困难时使用,本实施例也可通过控制机构9使得行走机构中的轮毂电机3等不工作,进而完全经由扶手12手动驱使载物车移动,此时利用手动方式可便于载物车通过路况负责的场合。
40.为方便操作人员使用扶手12,在具体设计时,通常扶手12的用于承接外部推拉操纵的部位的高度可设置在900
‑
1050mm之间。该用于承接外部推拉操纵的部位一般也即是扶手12的顶端位置,且在具体实施时,其高度例如可为900mm、920mm、950mm、980mm、1000mm、
1025mm或1050mm。
41.在设置有扶手12的基础上,为利于载物车的收纳与运输,本实施例也可设置扶手12为可折叠的,从而使其可如图2中所示的倒置于载物平台6上。另外,除了可折叠,本实施例还能够设置扶手12具体为可拆卸地设置于车体1上,以能够在需要时拆下扶手12。该可拆卸设置采用现有的螺接、卡接等常规结构形式便可。
42.本实施例的载物车在应用中,与自动跟随模块匹配的外部信号源一般可为由操着人员拿持的遥控器或手环等发出,载物车的控制机构9根据自动跟随模块的反馈信号,从而便可控制行走轮2进行前进、后退、转弯以及停止等跟随动作。而且在停止状态时,控制机构9也可控制行走轮2中的轮毂电机3自锁,以防止载物车溜车。
43.此外,作为拓展,在载物车可跟随移动,以及可手动推拉移动的同时,本实施例也可设置能够利用遥控器与控制机构9通信链接,以遥控载物车的移动。当然,基于需要还可设置通过app等与控制机构9通信,以可使得载物车在跟随、遥控和手动等不同模式下切换,其也是可以的,而该app及相应的模式切换功能,均借鉴于现有的成熟控制方式便可。
44.本实施例的载物车在需要运输货物时,先通过人工触碰或遥控方式启动,接着可使得自动跟随模块与发送所述外部信号源的部件配对,而后可先带领载物车移动至待搬运地点。在待搬运地点,可通过人工搬运或是自动装卸方式装载货物,货物装载后便可带领载物车至目的地。到目的地后,再通过人工搬运或自动装卸方式卸下货物便可。
45.其中,在待搬运地点和目的地,需切断和自动跟随模块之间的链接,以使载物车停止,或是能够进行手动拖拉或遥控控制。而对于上述的自动装卸方式,其一般也即利用载物平台6的可升降功能,在待搬运地点载物车可移动至货物下方,然后通过载物平台6的上升实现对其的装载,在目的地则利用载物平台6的下降,并于下降到位后由货物下方移出,以实现对货物的卸载。
46.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。