1.本实用新型涉及裁设备技术领域,具体涉及一种泡棉裁切用裁切装置的改进。
背景技术:
2.模切工艺是包装印刷品最常用到的一道工艺,就是用模切刀根据产品设计要求的图样组合成模切版,在压力的作用下,将印刷品或其他圈装坯料轧切成所需形状或切痕的成型工艺,目前模切机根据模切工艺主要分为如下三种:
3.圆压圆模切机:该机的模切版台和压力滚筒的工作部分的形状都是圆筒状的,它是将一个或两个弧度与模切版滚筒相同的半圆形模切版固定于模切版滚筒上(或金属模切辊)。模压时,送料辊将加工板料送到模切版滚筒和压力滚筒之间,两者将其夹住对滚模压,模切版滚筒每旋转一周就完成一次模切任务。由于该模切机工作时滚筒是连续运转的,因此它的工作效率相对于其他模切机来说是最高的,特别适合于大批量的生产,但正是由于其模切速度快,导致有时不能保证所需的模切精度。
4.圆压平模切机:圆压平的刀模版台是平板状的,并且可以借助于背面的滑轮做前后回程运动,加工板料通过模压滚筒的叼纸牙续纸。工作时,在模压滚筒运转的同时,版台随之向前运动,从而实现模切,在叼纸牙续下一张纸之前,版台作回程运动重新回到起始位置,便于下一次模切工作。这类模切机采用了圆筒形的压力滚筒代替压板,故工作时不是“面接触”而是“线接触”,机器在模切时只需较小的压力,因而机器的负载比较平稳。
5.平压平模切机:平压平型模切机的模切版台和压切机构的形状都是平板状的,模切版被固定在平整的版台上,被加工板料放在压板(下压盘)上。工作时,模切版台固定不动,压板通过曲轴连杆作用往复运动,使得版台与压板不断地离合压,每合压一次便实现一次模切。
6.由于平压平型模切机相对于其他模切设备具有结构简单、维修方便、便于操作、容易更换模切压痕版、适合不同克重的材料模切精确高等一系列优点,所以它具有广泛的市场,适用于折叠纸盒、粘贴纸盒、瓦楞纸箱的模切压痕处理以及泡棉等较软材料的裁切,是目前国内使用较为普遍的模切设备。
7.但是以上三种模切机裁刀均为固定式结构,裁刀无法根据模切材料实际位置和姿态进行自动调整,无法保证高精度裁切。
技术实现要素:
8.本实用新型针对现有技术中用于裁切的设备的裁刀均为固定式结构,无法保证裁切的精度的问题,本实用新型提出一种新型的自动裁切装置,可根据检测到的待裁切件的实际位置来控制裁切刀移动,以实现对待裁切件的精确裁切,提高了裁切的精确度。
9.为实现上述实用新型目的,本实用新型采用下述技术方案予以实现:
10.本实用新型提供一种自动裁切装置,包括有:
11.三轴运动机构,所述三轴运动机构包括有:
12.y轴运动机构;
13.x轴运动机构,所述x轴运动机构可滑动的设置在所述y轴运动机构上且能够在y轴运动机构的驱动下做y向移动;
14.z轴运动机构,所述z轴运动机构可滑动的设置在所述x轴运动机构上,能够在x轴运动机构驱动下做x向运动;
15.旋转机构,装配在所述z轴运动机构上,能够在所述z轴运动机构的带动下上下移动;
16.裁切刀,与所述旋转机构连接,能够在所述旋转机构带动下转动;
17.摄像元件,装配在所述z轴运动机构上,用于拍摄待裁切件图像信息;
18.控制器,与所述三轴运动机构、旋转机构和摄像元件通讯连接,能够根据摄像元件拍摄的图像获取到待裁切件的位姿信息控制三轴运动机构和旋转机构动作。
19.在本技术的一些实施例中,自动裁切装置还包括有发光元件,其装配在所述z轴运动机构上且位于所述摄像元件的下方。
20.在本技术的一些实施例中,其特征在于,
21.还包括有:安装座,与所述z轴运动机构的动力输出端连接;
22.第一连接部件,与所述安装座固定连接;
23.第二连接部件,与第一连接部件连接,在所述第二连接部件上装配有所述摄像元件;
24.第三连接部件,与所述第一连接部件连接,位于所述第二连接部件的下方,在所述第三连接部件上装配有所述发光元件。
25.在本技术的一些实施例中,还包括有:镜头,其与所述摄像元件连接,所述发光元件环绕设置在所述镜头的周圈。
26.在本技术的一些实施例中,所述裁切刀包括有本体和竖直设置在所述本体上的刀片,所述刀片设置多个,多个刀片相互临接。
27.在本技术的一些实施例中,所述y轴运动机构包括有:第一驱动装置、第一直线模组和第一滑轨,所述第一驱动装置与所述第一直线模组连接;
28.所述x轴运动机构包括有:第一滑块,第二滑轨、第二驱动装置和第二直线模组,所述第一直线模组和所述第一滑块传动连接,所述第一滑块和所述第二滑轨连接,所述第二驱动装置、第二直线模组与所述第二滑轨固定连接,所述第一滑块滑动设置在所述第一滑轨内。
29.所述z轴运动机构包括有:第二滑块、第三驱动装置和第三直线模组,所述第二直线模组与第二滑块传动连接,第二滑块滑动设置在第二滑轨上,所述第三驱动装置和所述第三直线模组传动连接且与所述第二滑块固定连接。
30.在本技术的一些实施例中,所述第一直线模组、第二直线模组和第三直线模组为滚珠丝杠直线模组。
31.在本技术的一些实施例中,所述旋转机构为旋转电机。
32.在本技术的一些实施例中,所述发光元件的光线发出方向朝向待切裁切件。
33.缓冲机构,缓冲轮,与一滑动件连接,在架体上设置有滑动轨道,缓冲轮通过滑动件滑动设置在滑动轨道内。
34.与现有技术相比,本实用新型的优点和积极效果是:
35.本实用新型中提出的自动裁切装置,设置有三轴运动机构,可实现x、y、z三个方向的运动,同时还设有旋转机构,将裁切刀装配到旋转机构上,通过三轴运动机构和旋转机构的配合可实现对裁切刀四个方向的位置的调整,在对待裁切件裁切之前先通过摄像元件拍摄图片,传递给控制器,通过控制器分析获得待裁切件的位姿信息,然后根据分析到的待裁切件的位姿信息控制三轴运动机构和旋转机构带动裁切刀运动到需要裁切的位置,保证了裁切位置的精确性,进而提高了裁切的精度。
36.结合附图阅读本实用新型的具体实施方式后,本实用新型的其他特点和优点将变得更加清楚。
附图说明
37.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作一简单地介绍,显而易见地,下面描述中的附图是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
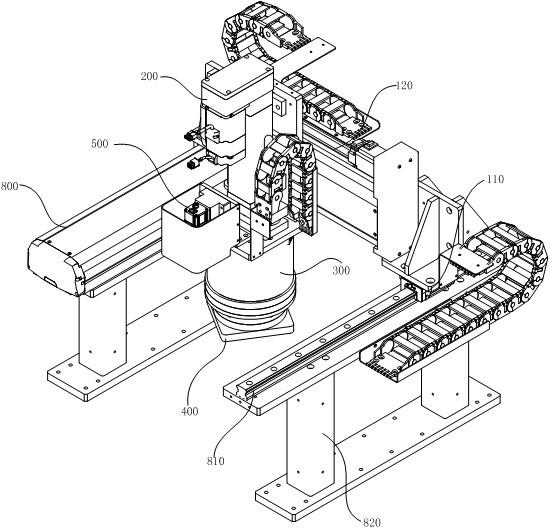
38.图1为本实用新型实施例自动裁切装置的立体结构图一;
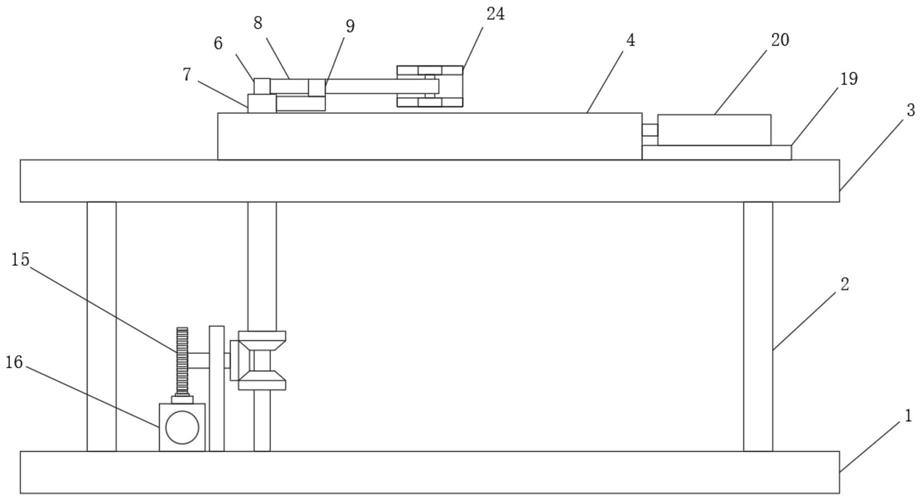
39.图2为本实用新型实施例自动裁切装置的主视图;
40.图3为本实用新型实施例自动裁切装置的俯视图;
41.图4为本实用新型实施例自动裁切装置的立体结构图二;
42.图5为图4的a处局部放大图。
具体实施方式
43.为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
44.需要说明的是,在本实用新型的描述中,术语“上”、“下”、“左”、“右”、“竖”、“横”、“内”、“外”等指示的方向或位置关系的术语是基于附图所示的方向或位置关系,这仅仅是为了便于描述,而不是指示或暗示所述装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性。
45.本实用新型提供一种自动裁切装置的实施例,参照图1
‑
图5所示,具体的,本实施例中的自动裁切装置结构包括有:三轴运动机构,所述三轴运动机构包括有:
46.y轴运动机构,优选的,本实施例中的所述y轴运动机构包括有:第一驱动装置、第一直线模组和第一滑轨810,所述第一驱动装置与所述第一直线模组传动连接,第一直线模组可以为滚珠丝杠直线模组,滚珠丝杠直线模组对应包括有第一丝杠和第一螺母,第一驱动装置对应为第一驱动电机,连接时,第一驱动电机和第一丝杠连接,第一丝杠和第一螺母螺纹配合。
47.为实现对三轴运动机构的支撑,本实施例中的自动裁切装置还包括有支撑架800,第一滑轨810设置在所述支撑架800上,第一滑轨810可设置有2个,对称设置,支撑架800的下方设置有支撑柱体820。
48.x轴运动机构100,所述x轴运动机构100可滑动的设置在所述y轴运动机构上且能够在y轴运动机构的驱动下做y向移动;
49.所述x轴运动机构100包括有:第一滑块110、第二滑轨120、第二驱动装置和第二直线模组,所述第一直线模组和所述第一滑块110传动连接,所述第一滑块110和所述第二滑轨120连接,所述第二驱动装置、第二直线模组与所述第二滑轨120固定连接,所述第一滑块110滑动设置在所述第一滑轨810内。
50.具体的,第一滑块110和第一螺母连接,在第一驱动装置转动时带动第一丝杠转动,第一丝杠带动第一螺母做直线移动,第一螺母带动第一滑块110沿第一滑轨810做y方向的直线移动,由于第一滑块110和第二滑轨120连接,第二滑轨120和第二驱动装置和第二直线模组连接,进而带动整个x轴运动机构100做y向移动。
51.z轴运动机构200,所述z轴运动机构200可滑动的设置在所述x轴运动机构100上,能够在x轴运动机构100驱动下做x向运动;所述z轴运动机构200包括有:第二滑块、第三直线驱动装置和第三直线模组,所述第二直线模组与第二滑块传动连接,第二滑块滑动设置在第二滑轨120上,所述第三驱动装置和所述第三直线模组传动连接且与所述第二滑块固定连接。
52.同样的,第二滑块和第二直线模组传动连接,可以在第二直线模组驱动下相对第二滑轨120沿x方向移动,由于第二滑块和第三直线驱动装置和第三直线模组连接,进而带动整个z轴运动机构200做x向移动。
53.第二直线模组和第三直线模组结构与第一直线模组相同,在此不做赘述。
54.旋转机构300,装配在所述z轴运动机构200上,能够在所述z轴运动机构200的带动下上下移动,优选的,旋转机构300可以选用旋转电机,或者直接采用的带有动力的旋转台,只有可用于实现旋转转动即可,在此不做具体限制。
55.裁切刀400,与所述旋转机构300连接,能够在所述旋转机构300带动下转动,优选的,旋转机构300和裁切刀400之间通过快换锁紧机构进行锁紧连接,快换锁紧机构可直接采用现有技术中已有的快速锁紧结构,其可便于裁切刀400和旋转机构300之间的快速拆卸和更换,以便于在旋转机构300上装配不同类型的刀具。
56.摄像元件500,装配在所述z轴运动机构200上,用于拍摄待裁切件图像信息;
57.优选的,摄像元件500为摄像机,其采用高精度的线性相机。
58.控制器,与所述三轴运动机构、旋转机构300和摄像元件500通讯连接,能够根据摄像元件500拍摄的图像获取到待裁切件的位姿信息控制三轴运动机构和旋转机构300动作。
59.由于x轴运动机构100能够做y向运动,z轴运动机构200能够做x向运动,z轴运动机构200能够驱动旋转机构300和裁切刀400做z向运动,旋转机构300能够带动裁切刀400做z向转动,x轴运动机构100和z轴运动机构200连接,z轴运动机构200和旋转机构300连接,旋转机构300和裁切刀400连接,进而实现裁切刀400可以做三个方向的运动以及一个方向的转动,能够实现四个方向的位置调整。
60.为方便描述,本实施例中以待裁切件为泡棉为例进行说明,
61.当需要裁切时,开始时裁刀处于等待位,控制器发送信号到摄像元件500,摄像元件500对泡棉进行拍照,拍照后将图片信息发送给控制器,控制器内预设有图像分析处理模块,对图像进行分析处理,获取到泡棉的位姿信息,如在设置时,可设置控制器分析图像来获得泡的条形码和边缘位置,然后根据获取到的位姿信息发送信号给三轴运动机构和旋转机构300,根据泡棉的位置控制x轴运动机构100、y轴运动机构、z轴运动机构200和旋转机构300中的其中任一个或几个动作,以带动裁切刀400移动,裁刀移动至裁切位,实现精准裁切,裁切边缘整齐,实现了对泡棉的精确裁切,提高了裁切的精确度。
62.无胶泡棉裁切时,空白离型纸作为移动载体,控制裁切刀400移动到裁切位后通过精确控制裁切力,实现半裁的方式,使得裁切时只把泡棉裁断而下面的空白离型纸不裁断,裁切力第三驱动装置的驱动来保证。
63.当进行全裁时,则控制裁切到将泡棉和离型纸同步裁断即可。
64.在本技术的一些实施例中,自动裁切装置还包括有发光元件600,其装配在所述z轴运动机构200上且位于所述摄像元件500的下方。通过发光元件600可发出光线照射在泡棉上,以便于摄像元件500对泡棉进行拍照时的拍摄精度,保证获取到的泡棉的位姿信息的精确性。
65.在本技术的一些实施例中,所述发光元件600的光线发出方向朝向待切裁切件。
66.发光元件600可选用led灯之类的面光源发光件即可,在此不做具体限制。
67.在本技术的一些实施例中,自动裁切还包括有:安装座710,与所述z轴运动机构200的动力输出端连接,z轴运动机构200动作时可带动安装座710上下移动。
68.第一连接部件720,与所述安装座710固定连接,优选的,第一连接部件720为第一连接座。其垂直设置在所述安装座710上。
69.第二连接部件730,与第一连接部件720连接,在所述第二连接部件730上装配有所述摄像元件500;第二连接部件730垂直第一连接部件720设置。
70.第三连接部件740,与所述第一连接部件720连接,位于所述第二连接部件730的下方,在所述第三连接部件740上装配有所述发光元件600。
71.在本技术的一些实施例中,自动裁切装置还包括有:镜头750,其与所述摄像元件500连接,所述发光元件600环绕设置在所述镜头750的周圈。
72.在本技术的一些实施例中,所述裁切刀400包括有本体和竖直设置在所述本体上的刀片,所述刀片设置多个,多个刀片相互临接。在进行泡棉裁切时,可通过z轴运动机构200向下移动带动裁切刀400向下移动,通过位于裁切到上的多个刀片从上到下运动对泡棉进行裁切。
73.本实用新型中提出的自动裁切装置,设置有三轴运动机构,可实现x、y、z三个方向的运动,同时还设有旋转机构300,将裁切刀400装配到旋转机构300上,通过三轴运动机构和旋转机构300的配合可实现对裁切刀400四个方向的位置的调整,在对待裁切件裁切之前先通过摄像元件500拍摄图片,传递给控制器,通过控制器分析获得待裁切件的位姿信息,然后根据分析到的待裁切件的位姿信息控制三轴运动机构和旋转机构300带动裁切刀400运动到需要裁切的位置,保证了裁切位置的精确性,进而提高了裁切的精度。
74.最后应说明的是:以上实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:
其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。