1.本发明属于清洁设备技术领域,具体是一种集尘基站。
背景技术:
2.扫地机器人和吸尘器等清洁设备越来越普遍,为了清洁更加方便,因此设计了基站对扫地机器人或吸尘器里面的灰尘进行集中处理,但是目前的基站只能对其中一种设备进行集尘清理,需要对多个设备进行清理,需要对应设置多个基站,那么就会非常占用室内空间,并且显得十分凌乱。
3.另外现有的基站功能较为单一,并且在吸尘时吸尘电机所发出的噪音较大,影响用户的体验。
技术实现要素:
4.本发明的目的在于提供一种集尘基站,以解决上述背景技术中提出的问题。
5.为实现上述目的,本发明提供如下技术方案:
6.一种集尘基站,包括外壳、集尘装置和三通管道,所述外壳上下两端分别设置有对接位一和对接位二,所述集成装置安装在外壳内,用于产生吸力,吸附清洁设备的灰尘,所述三通管道一端与集尘装置连接,另外两端分别往对接位一和对接位二方向延伸,形成吸尘管道一和吸尘管道二,位于所述吸尘管道一和吸尘管道二所在进尘口处,分别对应设置用于封闭进尘口的开合装置一和开合装置二。
7.进一步的技术方案,所述开合装置一包括铰接在上端进尘口处的风道门,位于铰接处设置有驱动装置一,所述驱动装置一与风道门连接,通过驱动装置一带动风道门开合,从而控制进尘口的开闭。
8.进一步的技术方案,位于吸尘管道一外侧,靠近进尘口的一端设有用于打开吸尘器挡门的顶出机构。
9.进一步的技术方案,所述顶出机构包括固定座,以及安装在固定座上的驱动装置二,所述固定座上部形成放置位,所述放置位上分别设有开口和触发开关,所述触发开关与驱动装置二电性连接,所述固定座内还设有滑轨,所述滑轨滑动连接有顶出块,所述驱动装置二连接有导向块,所述导向块可与顶出块相抵。
10.进一步的技术方案,位于放置位两侧均铰接有夹紧臂,所述夹紧臂外侧与连接杆一端铰接,所述连接杆另一端与导向块端部铰接。
11.进一步的技术方案,所述连接杆包括导向轴和运动滑块,所述导向轴一端与导向块连接,所述运动滑块一端与导向轴另一端铰接,所述运动滑块另一端与夹紧臂铰接。
12.进一步的技术方案,所述集尘装置包括内设有尘袋固定结构,所述尘袋固定结构包括集尘壳体,所述集尘壳体内设有集尘空间,所述集尘空间内上部设有固定架,所述固定架一端与集尘壳体铰接,所述固定架内设有卡接位,所述卡接位向固定架另一端延伸形成入口,集尘袋进尘端可从入口进入卡接位与固定架卡接固定,所述集尘壳体靠近入口处设
有按压键,所述按压键可与集尘袋上部扣合固定。
13.进一步的技术方案,所述集尘空间顶部设有uv消毒灯,所述uv消毒灯与集尘袋位置对应。
14.进一步的技术方案,所述集尘壳体上分别设有吸尘口和进气口,所述吸尘口与三通管道连接,所述进气口外侧对应安装有吸尘装置,所述吸尘装置包括风机罩,以及位于风机罩内的吸尘电机,所述风机罩内设有用于固定吸尘电机的橡胶组件,所述风机罩侧壁还设有多个出风消声孔。
15.进一步的技术方案,所述吸尘装置还包括保护罩,所述保护罩底部设有多个通风孔,所述风机罩安装在保护罩内,所述保护罩底部安装有过滤装置。
16.本发明的有益效果:
17.本发明提供一种集尘基站,通过设置吸尘管道一和吸尘管道二,实现一个基站可以对两台设备继续进行吸尘清理,减少了室内占用空间,另外,通过开合装置一和开合装置二的设置,实现基站对两台设备同时或单独进行吸尘,可以根据实际情况进行选择,拓展了基站的使用功能;
18.另外,通过在风机罩侧壁上设有多个出风消声孔,使风打散,而不集中从一处吹出,减低风压,即减少空气与物体的摩擦力,从而达到减小噪音目的,以及风机罩和吸尘电机采用无接触安装方式,通过橡胶组件进行吸尘电机进行固定,因此吸尘电机工作时产生的振动并不会直接传递到风机罩中,而是先通过橡胶组件进行缓冲过滤,以达到减震的目的。
附图说明
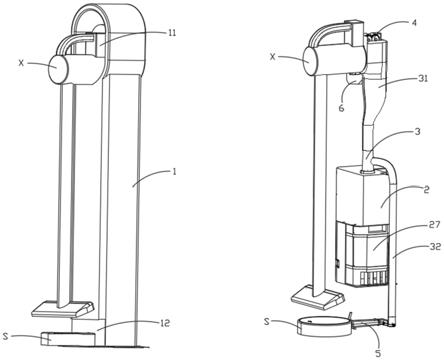
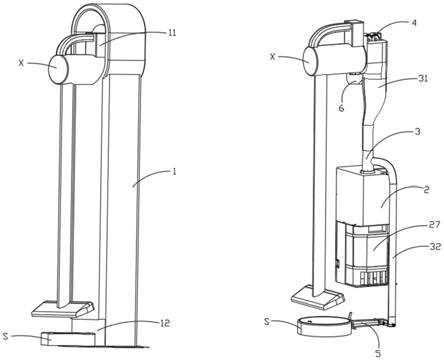
19.图1:本发明的整体内外结构图。
20.图2:本发明的开合装置一结构图。
21.图3:本发明的开合装置二结构图。
22.图4:本发明的顶出机构使用示意图。
23.图5:本发明的顶出机构结构图。
24.图6:本发明的顶出机构中固定座结构图。
25.图7:本发明的集尘装置结构图。
26.图8:本发明的集尘装置剖面,及尘袋固定结构示意图。
27.图9:本发明的保护罩结构图。
28.图10:本发明的吸尘装置爆炸图。
具体实施方式
29.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,
30.请参照图1
‑
10,
31.本发明所述的集尘基站具有双吸尘通道,具体包括集尘装置2和三通管道3,三通管道3一端与集尘装置2连接,另外两端分别往外壳1的对接位一11和对接位二12方向延伸,形成吸尘管道一31和吸尘管道二32,其中吸尘管道一31和吸尘管道二32可以同时使用或者
单独使用;
32.使用前,先将吸尘器x所在的出尘端放置到基站中对接位一11中,使出尘端与吸尘通道一所在的进尘口33位置对应,以及将扫地机器人s行走到距离基站50cm时,原地旋转180
°
之后,向基站下端的对接位二12运动,最终与吸尘通道二所在的进尘口33位置对应,
33.正常状态下,吸尘管道一31和吸尘管道二32分别通过开合装置一4和开合装置二5将所在进尘口33封闭,当需要同时使用时,则通过开合装置一4和开合装置二5将两个进尘口33打开,再启动集尘装置2产生吸力,将吸尘器x和扫地机器人s内的灰尘吸出,经过吸尘管道一31和吸尘管道二32收集到集尘装置2中,当需要单独使用时,可以根据实际情况选择开启吸尘管道一31或吸尘管道二32,再通过开合装置二5或开合装置一4将另一吸尘管道关闭,此时即可对其中一台设备进行集尘清理,并且由于只开启了一条吸尘管道,集尘装置2的吸力则可以集中到该吸尘管道中,使吸力更强劲,清洁效果更好。
34.通常情况下吸尘器x与基站是配套的,因此与配套使用的吸尘器x结构,会与市面上的吸尘器x结构不完全相同,为了便于与集尘宝对接,通常在吸尘器x上部设有出尘口,在出尘口处会设有挡门将出尘口封闭,挡门一端与吸尘器x铰接,另一端则通过按键开关锁住,通过按压按键开关,挡门即可弹开;
35.本发明实施例中,开合装置一4包括风道门41和驱动装置一42,在进行集尘前,将吸尘器x的出尘端放置到与吸尘管道一31所在的进尘口33对应的位置,然后通过手动或者顶出机构6将用于封闭吸尘器x出尘口的挡门打开,由于在进出口出设置有风道门41,还处于关闭状态,因此,即使挡门可以打开,还是处于将出尘口封闭的状态;
36.其中驱动装置一42包括驱动电机一421、齿轮组422和转轴423,进行吸尘时,在驱动电机一421和齿轮组422的配合下,驱动转轴423转动,由于风道门41一侧与转轴423固定连接,即风道门41跟随转轴423动作,以转轴423为中心向吸尘管道内转动,也就是将吸尘管道一31所在的进尘口33打开,同时,由于挡门已经被打开,此时挡门会被弹出,跟随风道门41向吸尘管道内运动,使出尘口与吸尘管道一31所在的进尘口33连通,最后通过集尘装置2产生负压,将位于吸尘器x内的灰尘进过出尘口、进尘口33,以及吸尘管道一31,最终进入集尘装置2中;
37.完成吸尘后,在驱动电机一421和齿轮组422的配合下,驱动转轴423转动,带动风道门41以转轴423为中心往吸尘管道一31所在的进尘口33靠近,在风道门41运动的过程中,与挡门相抵,同步推动挡门运动,当风道门41将进风口关闭后,挡门也将吸尘器x的出尘口关闭,使用户下次使用时,无需手动将挡门关闭,增强用户体验。
38.本发明实施例中,开合装置二5包括夹条一51、夹条二52,以及驱动装置三53,其中夹条一51和夹条二52一端铰接形成可夹紧软管56的通道门夹,使用时,夹条二52是固定不动的,通过驱动装置三53上的齿轮54与夹条一51上的棘条(图未示)配合下,使夹条一51能够以铰接点为中心摆动,与夹条二52贴合,将软管56压住,也就是说,使吸尘管道二32所在进尘口33关闭,吸尘器x清理灰尘时,吸力更大清理效果更好。同理扫地机器人s清理灰尘时进尘口33开启、风道门41关闭,吸力更大清理效果更好。吸尘器x扫地机器人s同时清理灰尘时,进尘口33风道门41可以先后顺序开启清理或同时开启两端同时清理。还有在软管56远离吸尘管道二32的一端设置有密封嘴55,在吸尘时,密封嘴55与扫地机器人s所在的出尘口对接,可以避免吸力外泄,使吸尘效果更好。
39.本发明实施例中,位于吸尘管道一31外侧,靠近进尘口33的一端设有用于打开吸尘器x挡门的顶出机构6,具体由固定座61、触发开关65、顶出块67、导向块68和驱动装置二62组成,
40.使用时,将吸尘器x的出尘端放置到固定座61上部形成的放置位63中,使位于放置位63上的开口64与吸尘器x的按键开关位置对应,本发明实施例中,放置位63形成弧形,要注意的是,由于基站与吸尘器x是配套的,开口64的位置可以根据吸尘器x按键开关位置设置,或者吸尘器x按键开关位置可以根据开口64的位置设置;同时吸尘器x与触发开关65相抵,将触发开关65打开,即触发驱动装置二62动作,通过驱动装置二62带动导向块68向上运动与顶出块67相触,并最终将顶出块67顶起,使顶出块67沿滑轨66向上运动,从开口64处伸出,顶出块67伸出到一定位置后与按键开关相抵,从而可以将吸尘器x中的挡门打开,此过程,用户只需要将吸尘器x放入到放置位63中,全程无需手动,优化了用户体验,将挡门顶出后驱动装置二62复位同时带动导向块68和顶出块67复位;
41.另外,可以根据用户选择是否需要使用基站对吸尘器x进行集尘,当不需要集尘时,即使与触发开关65接触也不会启动驱动装置二62;
42.本发明实施例中,驱动装置二62由驱动电机二、凸轮和导杆组成,通过驱动电机二带动凸轮转动,使导杆沿着凸轮的运动轨迹活动,同时导杆置于导向块68中,当导杆被凸轮带动上升或下降时,使导向块68能够沿滑轨66方向上升或下降运动。
43.本发明实施例中,在导向块68向上运动的同时,会推动连接杆72同步向上运动,在连接杆72的推动下,使两个夹紧臂71相互靠近,从而可以将吸尘器x主机夹住,避免对吸尘器x进行清洁时产生的振动,使吸尘器x掉落或使吸尘器x位置偏移而影响清理效果;
44.连接杆72包括导向轴721和运动滑块722,运动滑块722一端与导向轴721一端铰接,随着导向轴721向上运动,运动滑块722位置发生偏,往夹紧臂71方向倾斜,对夹紧臂71形成支撑,同时向夹紧臂71施加推力,使两个夹紧臂71进一步靠近,即对吸尘器x主机进一步夹紧;
45.另外,两个夹紧臂71形状均为弧形,形状与吸尘器x主机相适应,使夹紧臂71更加贴合吸尘机主机,增大与吸尘器x主机的接触面积,并且两个夹紧臂71相对一侧设有硅胶垫,增加与吸尘器x主机的摩擦力。
46.本发明实施例中,尘袋固定结构22包括集尘壳体21,集尘壳体21内设有集尘空间,位于集尘空间内设有固定架221和集尘袋224,集尘壳体21上设有可与集尘袋224上部扣合固定按压键225
47.正常情况下,集尘袋224由网状的袋体2241和支架22422774组成,使用时,通过按住按压将使其与支架22422774脱钩,由于固定架221只有一端与集尘壳体21铰接,当按压键225与支架22422774脱钩后,固定架221的另一端会掉下来形成倾斜状态,此时,可以将支架22422774从固定架221入口223处抽出,同时将袋体2241从集尘空间中带出;
48.将旧集尘袋224取出后,更换新的集尘袋224,此时的固定架221依然保持倾斜的状态,将新集尘袋224的支架22422774从固定架221的入口223处插入到卡接位222中,然后将固定架221往上抬起,使集尘袋224中的支架22422774与按压键225重新扣合固定即可完成集尘袋224的更换。
49.本发明实施例中,集尘空间顶部设有与集尘袋224位置对应的uv消毒灯26,在吸尘
时同时对集尘袋224内的灰尘进行消毒,可以达到杀菌和过滤尾气的双重净化效果。
50.本发明实施例中,吸尘装置27包括吸尘电机272和风机罩271,吸尘电机272通过进气口212将集尘装置2中的空气吸出,从而形成吸力,那么空气就会从吸尘电机272的另一端排出,因此会形成风压,通过在风机罩271侧壁上设有多个出风消声孔274,使风打散,而不集中从一处吹出,减低风压,即减少空气与物体的摩擦力,从而达到减小噪音目的;
51.另外风机罩271和吸尘电机272采用无接触安装方式,也就是说,风机罩271和吸尘电机272不会直接接触,而是通过橡胶组件273进行固定,因此吸尘电机272工作时产生的振动并不会直接传递到风机罩271中,而是先通过橡胶组件273进行缓冲过滤,以达到减震的目的。
52.本发明实施例中,在保护罩275底部安装有过滤装置277,其中过滤装置277包括沿保护罩275周边设置的安装架2771,安装架2771内靠近通风孔276的一端设有蜂窝挡板2772,进一步起到降噪的效果,气流经过蜂窝挡板2772后,进入hepa过滤器2773(中文意思为高效空气过滤器2773,达到hepa标准的过滤网,对于0.1微米和0.3微米的有效率达到99.7%),将掺杂在空气中的灰尘和悬浮物进行过滤,避免返回空气中,形成二次污染,另外hepa过滤器277333下方设有用于固定的支架22422774,通过在之间上设置矩阵排列的方形小孔2775,进一步起到降噪效果。
53.对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
54.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。