1.本发明属于汽车变速器控制领域,特别是涉及混动车辆变速器发电机调速控制离合器的结合方法。
背景技术:
2.随着国内汽车保有量的进一步提升,化石燃料大量的取用,对人类生存的环境造成很大负担。面对人类日益增长的交通需求,未来出行会更加注重低碳环保,现有的传统燃油汽车将会被时代淘汰,纯电动、混合动力汽车为主的新能源汽车将成为支持传统汽车企业的新动力引擎。
3.混合动力汽车是指在同一辆汽车上配置了两种不同动力装置和储能装置的运载工具,并通过先进的控制系统进行动力耦合和协作,发挥出两套系统各种的优势,达到降低能源消耗的目的。在基于序列式单离合器变速器结构的p1p3(p1电机和p3电机)混动专用变速器换挡过程中,涉及到离合器的分离和结合,在amt或者dct离合器结合过程中存在大量的离合器滑磨,为保证动力的平顺性和连贯性,不仅结合时间长,而且会损失大量的能量,增加离合器摩擦材料的热负载,同时会对润滑系统提出更高的需求。本发明使用电机调整离合器主从盘转速差,调速完成后快速结合离合器,过程中降低离合器滑磨功率损失,提升混动车辆整体效率。
技术实现要素:
4.本发明提供混动车辆变速器发电机调速控制离合器的结合方法,本发明旨在提供离合器结合过程速度的同时,降低离合器滑磨损耗,同时降低对离合器摩擦片的损耗。
5.实现上述目的的技术方案如下:
6.混动车辆变速器发电机调速控制离合器的结合方法,其方法特征,包括以下步骤:
7.s1,信号采集和信号处理:混动车辆变速器控制器单元实时获取发动机转速或者p1电机转速、输入轴转速、油门、车速或者p3电机转速、目标档位、实际档位信号;
8.s2,发电机目标扭矩计算,包括以下步骤:
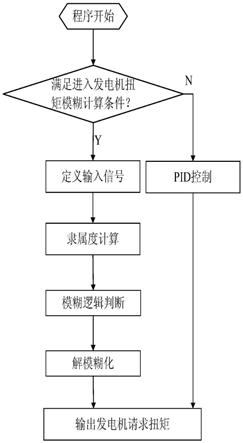
9.s21,变速器控制单元根据发动机转速或者p1电机转速、车速、输入轴转速、目标档位、实际档位条件,判断进入发电机扭矩模糊控制或者发电机扭矩pid控制,若进入条件满足进入模糊控制计算发电机扭矩,则变速器控制单元进入发电机扭矩请求模糊控制执行步骤s22,否则变速器控制单元进入发电机扭矩请求pid控制执行步骤s23;
10.s22,通过发电机扭矩模糊控制系统计算发电机请求扭矩:变速器控制单元获取油门、发动机实际转速或者应用p1电机实际转速换算到发动机实际转速、输入轴实际转速、车速或者p3电机转速作为发电机请求扭矩的模糊控制系统输入变量,根据发电机请求扭矩识别的模糊控制系统的模糊规则计算得到发电机请求扭矩;
11.s23,通过发动机转速或者p1电机实际转速换算到发动机实际转速与输入轴转速差、车速,应用pid控制方法进行发电机扭矩请求;
12.s3,离合器请求扭矩计算,包括以下步骤:
13.s31,离合器充油,当进入离合器结合过程后即刻开始发出离合器充油标识,充油完成后离合器进入扭矩响应模式;
14.s32,离合器扭矩请求扭矩在结合开始后设置了最终的结合扭矩,其扭矩增长斜率应用模糊控制算法进行计算,该模糊系统的输入条件为发电机请求扭矩、发动机实际转速或者应用p1电机实际转速换算到发动机实际转速与输入轴实际转速差、车速或者p3电机转速,根据离合器扭矩增长斜率的模糊控制系统的模糊规则计算得到离合器扭矩增长斜率;
15.s4,当发动机转速与输入轴转速差小于设定阈值且离合器扭矩大于设定阈值时,离合器结合完成。
16.本发明结合p1p3(p1电机和p3电机)架构混动车辆离合器结合过程,分离出2个重要执行部件的控制方法。其中发电机请求扭矩设计了6个模糊规则来反应发电机调速状态,其中有3个为发电机降速调速,3个为发电机升速调速,同时考虑油门大小,以及车速高低,当油门大小。当车速较低或者油门较小时,车辆驾驶性对扭矩变化较为敏感请求发电机扭矩请求,但是对调速时间要求不高,所以在涉及到小油门和低速工况时,尽量降低发电机调速扭矩,适当增长调速时间,提高调速精度;而当车速较高且油门较大时,需要离合器快速传递扭矩,而扭矩变化对车辆驾驶性影响较小,所以在这种工况下,发电机调速扭矩可以增大,以提高发动机转速调速时间,同时可以相对降低调速精度;同时设定了模糊控制可以pid反馈调节控制跳转条件,在当离合器主从盘转速差较小时,应用pid反馈条件,提高转速调节精度。在离合器扭矩请求时,应用模糊控制算法控制离合器结合速率,考虑油门和离合器出从盘转速差绝对值两个输出参数,在此基础上建立了4个模糊规则,其中2个为小油门工况,另外2个为非小油门工况,离合器结合过程与油门关系较大,当油门不大时,优先考虑降低离合器滑磨扭矩同时降低滑磨损耗,该工况下可以适当延长结合时间;当驾驶员油门不小时,优先考虑车辆动力性,可以适当加快离合器结合时间,降低动力迟滞。两个重要执行部件分配应用pid模糊控制和模糊控制后,可以提高车辆响应的同时降低能耗和保护离合器。
17.综上所述,本发明具有以下优点:
18.1、降低离合器滑磨功率,减少功率损失,降低对离合器摩擦片散热需求;
19.2、提升离合器结合速率,减少离合器结合时间,动力传递更加快速;
20.3、一定程度上降低离合器磨损和烧蚀的可能性。
附图说明
21.图1本发明控制逻辑示意图;
22.图2离合器结合过程示意图;
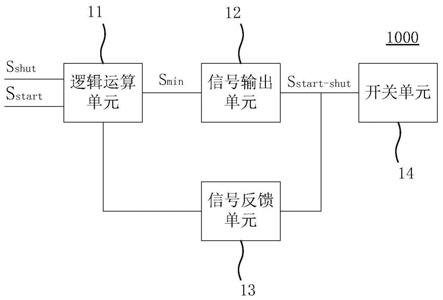
23.图3控制过程信号交互示意图。
具体实施方式
24.下面结合图1至图3对本发明进行说明。
25.本发明的混动车辆变速器发电机调速控制离合器的结合方法,包括以下步骤:
26.s1,信号采集和信号处理:混动车辆变速器控制器单元实时获取发动机转速或者
p1电机转速、输入轴转速、油门、车速或者p3电机转速、目标档位、实际档位信号。
27.s2,发电机目标扭矩计算,包括以下步骤:
28.s21,变速器控制单元根据发动机转速或者p1电机转速、车速、输入轴转速、目标档位、实际档位条件,判断进入发电机扭矩模糊控制或者发电机扭矩pid控制,若进入条件满足进入模糊控制计算发电机扭矩,则变速器控制单元进入发电机扭矩请求模糊控制执行步骤s22,否则变速器控制单元进入发电机扭矩请求pid控制执行步骤s23。
29.s22,通过发电机扭矩模糊控制系统计算发电机请求扭矩:变速器控制单元获取油门、发动机实际转速或者应用p1电机实际转速换算到发动机实际转速、输入轴实际转速、车速或者p3电机转速作为发电机请求扭矩的模糊控制系统输入变量,根据发电机请求扭矩识别的模糊控制系统的模糊规则计算得到发电机请求扭矩。
30.s23,通过发动机转速或者p1电机实际转速换算到发动机实际转速与输入轴转速差、车速,应用pid控制方法进行发电机扭矩请求。
31.s3,离合器请求扭矩计算,包括以下步骤:
32.s31,离合器充油,当进入离合器结合过程后即刻开始发出离合器充油标识,充油完成后离合器进入扭矩响应模式。
33.s32,离合器扭矩请求扭矩在结合开始后设置了最终的结合扭矩,其扭矩增长斜率应用模糊控制算法进行计算,该模糊系统的输入条件为发电机请求扭矩、发动机实际转速或者应用p1电机实际转速换算到发动机实际转速与输入轴实际转速差、车速或者p3电机转速,根据离合器扭矩增长斜率的模糊控制系统的模糊规则计算得到离合器扭矩增长斜率。
34.s4,当发动机转速与输入轴转速差小于设定阈值且离合器扭矩大于设定阈值时,离合器结合完成。
35.优选地,所述发电机请求扭矩模糊控制系统s22具体步骤为:
36.s41,变速器控制单元获取车速v、油门x,离合器主动盘与从动盘转速差d作为模糊控制系统的输入变量,离合器主动盘与从动盘转速差d=发动机转速
‑
输入轴转速。
37.s42,将油门x、车速v和离合器主动盘与从动盘转速差d对应输入到隶属度函数a(x),b(v),c(d),d(d),分别得到对应的输出值a
x
、b
v
、c
d
、d
d
,其中,a(x)表示油门模糊集小于α的隶属函数,b(v)表示模糊集车速小于β的隶属函数,c(d)表示模糊集转速差为正的隶属函数,d(d)表示模糊集转速差为负的隶属函数;所述模糊集转速差为正表示:从动盘转速大于主动盘转速,模糊集转速差为负表示从动盘转速小于主动盘转速。
38.s43,将隶属度函数a(x),b(v),c(d),d(d)输出值a
x
、b
v
、c
d
、d
d
输入到模糊控制规则,得到模糊控制规则的输出值或发电机扭矩请求值的原始值a1、a2、a3、a4、a5、a6。
39.s44,将得到的发电机请求扭矩原始值a1、a2、a3、a4、a5、a6按照如下累加平均公式进行精确化处理得到最终需要的发电机请求扭矩,累加平均公式为:
40.其中ai为第i个模糊控制规则输出的发电机请求扭矩原始值,knj为规则分子系数,kdj为规则分母系数。
41.所述步骤s43中的模糊控制规则包括:
42.第一个模糊规则为:如果油门小于α且转速差为负,那么离合器主动盘转速高于离合器从动盘转速,此时发电机请求扭矩原始值a1为a
x
与c
d
中取小值。
43.第二个模糊规则为:如果车速小于β且转速差为负,那么离合器主动盘转速高于离合器从动盘转速,此时发电机请求扭矩原始值a2为c
d
与b
v
取小值。
44.第三个模糊规则为:如果油门小于α且转速差为正,那么离合器主动盘转速低于离合器从动盘转速,此时发电机请求扭矩原始值a3为d
d
与a
x
取平均值。
45.第四个模糊规则为:如果车速小于β且转速差为正,那么离合器主动盘转速低于离合器从动盘转速,此时发电机请求扭矩原始值a4为b
v
与d
d
取平均值。
46.第五个模糊规则为:转速差为正,发电机请求扭矩原始值a5为c
d
。
47.第六个模糊规则为:转速差为负,发电机请求扭矩原始值a6为d
d
。
48.优选地,所述步骤s32中,应用模糊控制算法计算离合器扭矩请求扭矩增长斜率的步骤为:
49.s51,变速器控制单元获取油门x,离合器主动盘与从动盘转速差d作为模糊控制系统的输入变量。
50.s52,将油门x和离合器主动盘与从动盘转速差d对应输入到隶属度函数e(x),f(d),分别得到对应的输出值e
x
、f
d
,其中,e(x)=表示模糊集油门小于γ的隶属函数,f(d)=表示模糊集转速差绝对值大于δ的隶属函数。
51.s53,将隶属度函数e(x),f(d)输出值e
x
、f
d
输入到模糊控制规则,得到模糊控制规则的输出值或者发电机扭矩请求值的原始值b1、b2、b3、b4。
52.s54,将得到的离合器请求扭矩斜率原始值b1、b2、b3、b4按照如下累加平均公式进行精确化处理得到最终需要的离合器请求扭矩斜率,累加平均公式为。
[0053][0054]
其中bi为第i个模糊控制规则输出的离合器请求扭矩斜率原始值,knj为规则分子系数,kdj为规则分母系数。
[0055]
所述步骤s53中的模糊控制规则包括:
[0056]
第一个模糊控制规则为:如果油门小于γ且转速差大于δ,那么离合器请求扭矩斜率原始值b1为e
x
、f
d
取平均值。
[0057]
第二个模糊控制规则为:如果油门小于γ,那么离合器请求扭矩斜率原始值b2为e
x
。
[0058]
第三个模糊控制规则为:如果转速差绝对值大于δ,那么离合器请求扭矩斜率原始值b3为e
x
。
[0059]
第四个模糊规则为油门小于γ且转速差大于δ,离合器请求扭矩斜率原始值b4为一个较大的固定扭矩斜率。
[0060]
所述步骤s23中应用pid控制方法进行发电机扭矩请求包括以下步骤:
[0061]
s61,变速器控制单元获取发动机转速h,输入轴转速j作为pid的条件参数;
[0062]
s62,将输入轴转速作为发电机请求扭矩pid调节系统的目标转速,发动机转速作
为发电机请求扭矩pid调节系统的实际转速,得到调节偏差e,上面所述的e=j
‑
h;
[0063]
s63,将调节偏差输入pid控制模块,输出发电机请求扭矩;
[0064]
j为输入轴转速,h为发动机转速。
[0065]
下面内容通过举例描述上述方案。本发明所述的结合方法的计算机程序安装于变速器控制单元tcu中。实施本发明所述的混动车辆变速器发电机调速控制离合器的结合方法涉及的相应模块由信号采集模块、转速差计算模块、发电机请求扭矩计算模块、离合器请求扭矩斜率计算模块、离合器结合判断完成模块组成。
[0066]
1)信号采集和处理:变速器控制单元tcu通过can线从发动机控制单元ecu实时获取发动机转速信号;变速器控制单元tcu通过can线从发电机控制单元mcu实时获取发电机转速信号;变速器控制单元tcu通过can线从防抱死系统abs实时获取车速信号;变速器控制单元tcu通过can线从整车控制单元hcu实时获取离合器结合指令、油门信号;
[0067]
2)离合器主从盘转速差计算:从p1p3混动结构可知,离合器主从盘转速差d=发动机转速
‑
输入轴转速,其中发动机转速来源与ecu,输入轴转速由tcu自身的转速传感器进行采集;
[0068]
3)发电机请求扭矩计算,包括以下步骤:
[0069]
31)变速器控制单元tcu根据hcu的离合器结合控制状态,离合器主从盘转速差,以及油门和车速信号判断进入模糊控制或者进入pid控制。若满足离合器主从盘转速差大于阈值,例如300rpm,或者油门信号大于阈值,例如50%,则进入发电机扭矩模糊控制;若离合器主从盘转速差小于阈值,例如300rpm,或者车速低于阈值,例如50km/h,则进入大电机pid调节。
[0070]
32)发电机请求扭矩模糊计算,变速箱控制单元tcu根据实时的转速差、油门、车速,通过发电机扭矩计算模糊系统计算得到发电机调速请求扭矩。
[0071]
321)定义输入信号。发电机请求扭矩模糊控制系统包括车速v、油门x、离合器主从盘转速差d三个信号输入变量,其中:
[0072]
油门x取值范围为0
‑
100(%);
[0073]
车速v取值范围为0
‑
255(km/h);
[0074]
离合器主从盘转速差
‑
3000
‑
3000(rpm)。
[0075]
322)隶属度计算。根据专家的经验和知识,结合车辆动态性和驾驶员的操作,本发明设计了4个隶属度函数,它们分别如下所示:
[0076]
a(x)表示油门模糊集小于α的隶属函数,所述α取值为0到100。本实施例a(x)取值范围为0
‑
100(因为隶属度取值为0
‑
100%,但是tcu不支持浮点运算,也就是不支持小数运算,因此将隶属度放大100倍),a(x)取值如表1所示:
[0077]
x010305080100a(x)01020304040
[0078]
表1
[0079]
a(x)取值不限于上述实施例,可以根据匹配车辆的驾驶性标定来确定。
[0080]
b(v)表示模糊集车速小于β的隶属函数,β取值为小于90km/h。本实施例b(v)取值范围为0
‑
100,b(v)取值如表2所示:
[0081]
v0406080120255
b(v)00204080100
[0082]
表2
[0083]
b(v)取值不限于上述实施例,可以根据匹配车辆的驾驶性标定来确定。
[0084]
c(d)表示模糊集转速差为正的隶属函数,本实施例c(d)取值范围为0
‑
100,c(d)取值如表3所示:
[0085]
d10020040080016003000c(d)1001007040100
[0086]
表3
[0087]
c(d)取值不限于上述实施例,可以根据匹配车辆的驾驶性标定来确定。
[0088]
d(d)表示模糊集转速差为负的隶属函数,d(d)取值范围为0
‑
100,d(d)取值如表4所示:
[0089][0090]
表4
[0091]
e(y)取值不限于上述实施例,可以根据匹配车辆的驾驶性标定来确定。
[0092]
将油门x、车速v和离合器主从盘转速差d输入到5个隶属度函数a(x),b(v),c(d),d(d)中,分别得到4个相应的输出值a
x
、b
v
、c
d
、d
d
。
[0093]
表1中,点x1对应a(x1)如点10对应20,点x2对应a(x2)如30对应40,当获得的油门x取值位于点x1如点10与点x2点30之间时,那么可以根据两点之间线性插值方法,得到a
x
=a(x1) (x
‑
x1)/(x2
‑
x1)*(a(x2)
‑
a(x1))。b
v
、c
d
、d
d
计算与上述方法类似。
[0094]
本实施例在tcu运行内部程序时,每10ms计算一次a
x
、b
v
、c
d
、d
d
。
[0095]
323)模糊逻辑判断:结合车辆的动态性和驾驶员的操作,根据上述4个隶属度函数,本发明设计了六个模糊控制规则,来计算发电机请求扭矩,这六个规则分别如下:
[0096]
第一个模糊规则为:如果油门小于α且转速差为负,那么离合器主动盘转速高于离合器从动盘转速,此时发电机请求扭矩原始值a1为a
x
与c
d
中取小值;
[0097]
第二个模糊规则为:如果车速小于β且转速差为负,那么离合器主动盘转速高于离合器从动盘转速,此时发电机请求扭矩原始值a2为c
d
与b
v
取小值;
[0098]
第三个模糊规则为:如果油门小于α且转速差为正,那么离合器主动盘转速低于离合器从动盘转速,此时发电机请求扭矩原始值a3为d
d
与a
x
取平均值;
[0099]
第四个模糊规则为:如果车速小于β且转速差为正,那么离合器主动盘转速低于离合器从动盘转速,此时发电机请求扭矩原始值a4为b
v
与d
d
取平均值;
[0100]
第五个模糊规则为:转速差为正,发电机请求扭矩原始值a5为c
d
;
[0101]
第六个模糊规则为:转速差为负,发电机请求扭矩原始值a6为d
d
。
[0102]
324)解模糊化
[0103]
将模糊逻辑判断得到的6个发电机请求扭矩原始值a1、a2、a3、a4、a5、a6按照如下累加平均公式进行精确化处理后最终需要的发电机请求扭矩系数:
[0104][0105]
其中a
i
为第i个模糊控制规则输出的发电机请求扭矩斜率原始值,k
nj
为规则分子系数,k
dj
为规则分母系数;这里的k
nj
和k
dj
是在实车上试验得到的。
[0106]
发电机请求扭矩模糊计算归一化处理,变速器控制单元tcu通过发电机请求扭矩归一化处理模块,对发电机请求扭矩进行归一化处理,将发电机请求扭矩转化为发电机扭矩请求所需范围的数值。
[0107]
发电机请求扭矩pid调节:将转速差信号输入pid调节器,再通过归一化处理,将pid输出的调节变量转换为发电机扭矩请求所需范围的数值。
[0108]
离合器扭矩请求,包括以下步骤:
[0109]
离合器扭矩请求最终目标值为标定阈值;
[0110]
离合器扭矩请求斜率根据油门、离合器主从盘转速差通过模糊系统计算得到:
[0111]
定义输入信号。离合器请求扭矩斜率模糊控制系统包括车速v、油门x、离合器主从盘转速差d三个信号输入变量,其中:
[0112]
油门x取值范围为0
‑
100(%);
[0113]
离合器主从盘转速差d绝对值0
‑
3000(rpm)。
[0114]
隶属度计算。根据专家的经验和知识,结合车辆动态性和驾驶员的操作,本发明设计了4个隶属度函数,它们分别如下所示:
[0115]
e(x)表示模糊集油门小于γ的隶属函数,其中,γ取值为0到50。本实施例e(x)取值范围为0
‑
100(因为隶属度取值为0
‑
100%,但是tcu不支持浮点运算,也就是不支持小数运算,因此将隶属度放大100倍,e(x)取值如表5所示:
[0116][0117]
表5
[0118]
e(x)取值不限于上述实施例,可以根据匹配车辆的驾驶性标定来确定。
[0119]
f(d)表示模糊集转速差绝对值大于δ的隶属函数,δ取值大于1000rpm。本实施例f(d)取值范围为0
‑
100,f(d)取值如表6所示:
[0120][0121]
表6
[0122]
f(d)取值不限于上述实施例,可以根据匹配车辆的驾驶性标定来确定。
[0123]
423)模糊逻辑判断:结合车辆的动态性和驾驶员的操作,根据上述四个隶属度函数,本发明设计了四个模糊控制规则,来计算离合器请求扭矩斜率,这四个规则分别如下:
[0124]
第一个模糊控制规则为:如果油门小于γ且转速差大于δ,那么离合器请求扭矩斜率原始值b1为e
x
、f
d
取平均值。
[0125]
第二个模糊控制规则为:如果油门小于γ,那么离合器请求扭矩斜率原始值b2为e
x
。
[0126]
第三个模糊控制规则为:如果转速差绝对值大于δ,那么离合器请求扭矩斜率原始值b3为e
x
。
[0127]
第四个模糊规则为油门小于γ且转速差大于δ,离合器请求扭矩斜率原始值b4为一个较大的固定扭矩斜率。
[0128]
424)解模糊化
[0129]
将模糊逻辑判断得到的4个离合器扭矩请求斜率原始值b1、b2、b3、b4按照如下累加平均公式进行精确化处理后最终需要的发电机请求扭矩系数:
[0130][0131]
其中b
i
为第i个模糊控制规则输出的离合器扭矩请求斜率原始值,k
nj
为规则分子系数,k
dj
为规则分母系数;这里的k
nj
和k
dj
是在实车上试验得到的。
[0132]
43)离合器扭矩请求斜率模糊计算归一化处理,变速器控制单元tcu通过离合器扭矩请求斜率归一化处理模块,对离合器扭矩请求斜率进行归一化处理,将发电机请求扭矩转化为离合器扭矩请求斜率所需范围的数值。
[0133]
44)离合器最终请求扭矩:通过斜率限制模块,将离合器请求扭矩斜率用模糊系统计算出的离合器扭矩请求斜率进行限制,得到最终的离合器请求扭矩。
[0134]
最后,当发动机转速与输入轴转速差小于设定阈值且离合器扭矩大于设定阈值时,例如发动机转速与输入轴转速差小于50rpm且离合器扭矩大于100nm,离合器结合完成。
[0135]
最后应说明的是:以上各实施例仅仅为本发明的较优实施例用以说明本发明的技术方案,而非对其限制,当更不是限制本发明的专利范围;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围;另外,将本发明的技术方案直接或间接的运用在其他相关的技术领域,均同理包括在本发明的专利保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。