1.本发明涉及安全驾驶技术领域,更具体地说,本发明涉及一种基于驾驶员的安全驾驶管控系统。
背景技术:
2.随着社会的不断进步,科技的发展,人们生活水平不断提高,私家车拥有量与日俱增,城市交通的压力也越来越大,安全驾驶就逐渐成为严峻的问题。城市车辆是除地铁以外的主要交通工具,其安全性低,在以往也出现过许多驾驶员因疲劳或身体原因导致事故的案例,车辆如果一旦失去驾驶员的掌控,是非常危险的,很容易造成事故。
3.在我国很多山区的道路长下坡路段,存在许多事故“黑点”,且事故大都与汽车制动失效有关。但制动失灵除极少数是因故障引起外,绝大多数是由于驾驶员不良的驾驶习惯和违规操作而引起的。最常见的错误操作行为就是长时间频繁使用刹车引起摩擦片温度升高,产生热衰退效应,致使制动效能丧失。“11.3”特大交通事故,是由于半挂车驾驶员无视交通安全,毫无安全防范意识和危急处置能力,从下坡开始到最终都采取了错误的驾驶操作才酿成的惨剧。同时我国乡镇道路形成环境复杂,红绿灯和道路规划不够完善,车辆和行人流动方向不确定,因此可能出现交通事故。
4.随着时代的进步,我国公路通行条件已经得到极大的改善。纵然道路条件再好,汽车的性能再先进,也要由人去驾驶,如果操作不当,仍然会发生事故。所以,世界上没有绝对安全的汽车,道路系统也无法给你绝对的安全保障,行车安全主要掌握在驾驶员手中。
5.车辆在遇见紧急情况时,驾驶员处在紧张的情绪当中,驾驶员很难保持清醒准确的判断并作出正确反应和处理措施,驾驶员有自己的驾驶操作习惯,在遇见紧急情况时即使给出合理的操作建议,驾驶员依然很难及时接收信息和按照信息完成驾驶操作,甚至多是依靠下意识的反应去处理,但是其紧急处理的方式很难保证其正确率,因此容易造成人员伤亡和较大的经济损失,因此需要一种基于驾驶员的安全驾驶管控系统来解决上述问题。
技术实现要素:
6.为了克服现有技术的上述缺陷,本发明提供了一种基于驾驶员的安全驾驶管控系统,本发明所要解决的技术问题是:车辆在遇见紧急情况时,驾驶员处在紧张的情绪当中,驾驶员很难保持清醒准确的判断并作出正确反应和处理措施,驾驶员有自己的驾驶操作习惯,在遇见紧急情况时即使给出合理的操作建议,驾驶员依然很难及时接收信息和按照信息完成驾驶操作,甚至多是依靠下意识的反应去处理,但是其紧急处理的方式很难保证其正确率,因此容易造成人员伤亡和较大的经济损失的问题。
7.为实现上述目的,本发明提供如下技术方案:一种基于驾驶员的安全驾驶管控系统,包括定位单元、图像采集单元和操作力学检测单元,所述定位单元、图像采集单元和操作力学检测单元的输出端与数据处理单元的输入端电连接,所述数据处理单元的输出端与
数据分析单元的输入端电连接,所述数据分析单元的输出端与处理器的输入端电连接,所述处理器的输出端与仿真单元的输入端电连接,所述处理器的输出端与处置方案匹配单元的输入端电连接,所述仿真单元的输入端与建模单元的输出端电连接,所述建模单元的输入端与数据存储单元的输出端电连接。
8.所述数据存储单元的输入端与数据分析单元的输出端电连接,所述处置方案匹配单元的输出端与对比单元的输入端电连接,所述仿真单元的输出端与对比单元的输入端电连接,所述对比单元的输出端与反馈单元的输入端电连接,所述反馈单元的输出端与处理器的输入端电连接。
9.所述处理器的输出端与管控单元的输入端电连接,所述管控单元的输出端与自动泊车系统的输入端电连接,所述处理器的输出端与警示单元的输入端电连接,所述管控单元的输出端与通信单元的输入端电连接,所述通信单元的输出端远程服务终端的输入端电连接,所述通信单元的输出端与报警单元的输入端电连接。
10.作为本发明的进一步方案:所述操作力学检测单元包括刹车压力检测单元、油门压力检测单元和方向盘转角检测单元。
11.作为本发明的进一步方案:所述刹车压力检测单元用于检测刹车踏板表面受力情况,便于判断刹车过程的急缓程度;
12.所述油门压力检测单元用于检测油门踏板表面受力情况,便于判断加速过程的急缓程度;
13.所述方向盘转角检测单元用于检测方向盘的转动角度,便于判断转向过程的角度。
14.作为本发明的进一步方案:所述图像采集单元用于采集车辆行驶环境的图像数据和车辆内部的图像数据,便于后续判断行驶环境中是否出现异常或其他车辆的快速靠近情况;
15.所述定位单元用于对车辆的位置信息进行采集;
16.所述数据分析单元用于对所采集的环境信息和车辆的操作行为信息进行处理和分析,并对采集的图像数据进行特征提取;
17.所述数据存储单元用于存储该车辆驾驶员正常驾驶过程中的踩踏刹车踏板的力度所形成的刹车急缓程度、踩踏油门踏板的力度所形成的车辆加速过程的急缓程度和旋转方向盘的转角大小所形成的转向程度数据;
18.所述建模单元用于根据数据存储单元中存储的驾驶员的正常安全驾驶操作习惯数据建立初始模型;
19.所述仿真单元用于结合初始模型和该时刻驾驶员操作过程中刹车踏板和油门踏板的踩踏力度、方向盘转角的大小数据和该行驶环境的图像数据形成仿真模型,并将仿真模型的结果发送至对比单元中;
20.所述处置方案匹配单元用于根据该车辆行驶环境图像的特征数据和车辆内部的驾驶员的操作图像匹配出合理的处置方案。
21.作为本发明的进一步方案:所述处置方案匹配单元存储多种处置方案,处置方案包括根据不同方向的道路异常和车辆行人快速靠近选择合适的刹车和加速程度或不同方向的转向避让。
22.作为本发明的进一步方案:所述对比单元用于对仿真单元得出的仿真结果与处置方案匹配单元匹配出的处置方案进行比对,将该驾驶员驾驶操作习惯形成的模型仿真得出该情况下驾驶员作出的应对操作方式与根据该情况下最合理的处置方案进行对比,并将对比结果发送至处理器;
23.所述管控单元用于在对比结果存在较大差异时,自动结束驾驶员的操作,并启动自动泊车系统;
24.所述自动泊车系统用于接管车辆的自动靠边停车过程;
25.所示警示单元用于在比结果存在较大差异时自动发出警示信号,提示过往行人和车辆保持安全距离。
26.所述报警单元用于在车辆出现故障或严重事故时及时进行报警。
27.本发明的有益效果在于:
28.1、本发明通过设置仿真单元、操作力学检测单元、图像采集单元、建模单元、处置方案匹配单元和对比单元,首先采集驾驶员的踩踏刹车踏板和油门踏板的力度,转动方向盘的角度大小,并结合当时驾驶环境的图像信息判断所处的情况,根据驾驶员在不同情况下的安全驾驶习惯建立驾驶员的操作模型,然后可根据出现的突发情况数据进行仿真操作,判断出该驾驶员下意识情况下的操作,同时将该种情况通过处置方案匹配单元匹配出最合适的处置方案,并将该方案与驾驶员的仿真操作进行对比,若是仿真操作与合理处置方案存在较大差异时,则管控单元停止采用驾驶员的操作,并根据情况选择合适时机进行自动泊车,本发明可根据驾驶员的操作习惯判断其遇见突发情况下的操作是否安全合理,有效的降低了依靠紧张情绪下危险操作所带来的损失和安全隐患;
29.2、本发明通过设置定位单元、远程服务终端和报警单元,定位单元将车辆位置信息采集发送至远程服务终端,在遇见紧急情况需要救援时,可自动发送位置信息,方便远程救援和服务人员及时了解情况和组织救援过程,同时报警单元可在遇见紧急情况时自动报警,使救援和服务过程更加及时精准。
附图说明
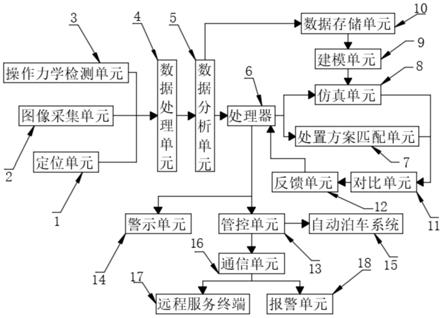
30.图1为本发明系统连接结构示意图;
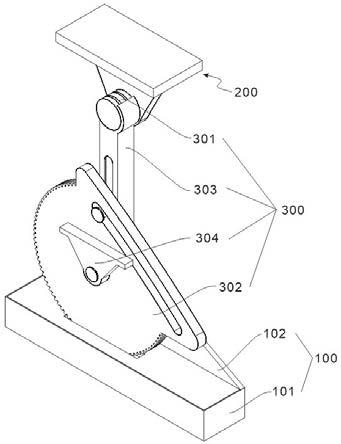
31.图2为本发明操作力学检测单元结构示意图;
32.图中:1、定位单元;2、图像采集单元;3、操作力学检测单元;31、刹车压力检测单元;32、油门压力检测单元;33、方向盘转角检测单元;4、数据处理单元;5、数据分析单元;6、处理器;7、处置方案匹配单元;8、仿真单元;9、建模单元;10、数据存储单元;11、对比单元;12、反馈单元;13、管控单元;14、警示单元;15、自动泊车系统;16、通信单元;17、远程服务终端;18、报警单元。
具体实施方式
33.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
34.如图1
‑
2所示,本发明提供了一种基于驾驶员的安全驾驶管控系统,包括定位单元1、图像采集单元2和操作力学检测单元3,定位单元1、图像采集单元2和操作力学检测单元3的输出端与数据处理单元4的输入端电连接,数据处理单元4的输出端与数据分析单元5的输入端电连接,数据分析单元5的输出端与处理器6的输入端电连接,处理器6的输出端与仿真单元8的输入端电连接,处理器6的输出端与处置方案匹配单元7的输入端电连接,仿真单元8的输入端与建模单元9的输出端电连接,建模单元9的输入端与数据存储单元10的输出端电连接。
35.数据存储单元10的输入端与数据分析单元5的输出端电连接,处置方案匹配单元7的输出端与对比单元11的输入端电连接,仿真单元8的输出端与对比单元11的输入端电连接,对比单元11的输出端与反馈单元12的输入端电连接,反馈单元12的输出端与处理器6的输入端电连接。
36.处理器6的输出端与管控单元13的输入端电连接,管控单元13的输出端与自动泊车系统15的输入端电连接,处理器6的输出端与警示单元14的输入端电连接,管控单元13的输出端与通信单元16的输入端电连接,通信单元16的输出端远程服务终端17的输入端电连接,通信单元16的输出端与报警单元18的输入端电连接。
37.如图2所示,操作力学检测单元3包括刹车压力检测单元31、油门压力检测单元32和方向盘转角检测单元33。
38.如图2所示,刹车压力检测单元31用于检测刹车踏板表面受力情况,便于判断刹车过程的急缓程度;
39.油门压力检测单元32用于检测油门踏板表面受力情况,便于判断加速过程的急缓程度;
40.方向盘转角检测单元33用于检测方向盘的转动角度,便于判断转向过程的角度。
41.如图1所示,图像采集单元2用于采集车辆行驶环境的图像数据和车辆内部的图像数据,便于后续判断行驶环境中是否出现异常或其他车辆的快速靠近情况;
42.定位单元1用于对车辆的位置信息进行采集;
43.数据分析单元5用于对所采集的环境信息和车辆的操作行为信息进行处理和分析,并对采集的图像数据进行特征提取;
44.数据存储单元10用于存储该车辆驾驶员正常驾驶过程中的踩踏刹车踏板的力度所形成的刹车急缓程度、踩踏油门踏板的力度所形成的车辆加速过程的急缓程度和旋转方向盘的转角大小所形成的转向程度数据;
45.建模单元9用于根据数据存储单元10中存储的驾驶员的正常安全驾驶操作习惯数据建立初始模型;
46.仿真单元8用于结合初始模型和该时刻驾驶员操作过程中刹车踏板和油门踏板的踩踏力度、方向盘转角的大小数据和该行驶环境的图像数据形成仿真模型,并将仿真模型的结果发送至对比单元11中;
47.处置方案匹配单元7用于根据该车辆行驶环境图像的特征数据和车辆内部的驾驶员的操作图像匹配出合理的处置方案。
48.如图1所示,处置方案匹配单元7存储多种处置方案,处置方案包括根据不同方向的道路异常和车辆行人快速靠近选择合适的刹车和加速程度或不同方向的转向避让。
49.如图1所示,对比单元11用于对仿真单元8得出的仿真结果与处置方案匹配单元7匹配出的处置方案进行比对,将该驾驶员驾驶操作习惯形成的模型仿真得出该情况下驾驶员作出的应对操作方式与根据该情况下最合理的处置方案进行对比,并将对比结果发送至处理器6;
50.管控单元13用于在对比结果存在较大差异时,自动结束驾驶员的操作,并启动自动泊车系统15;
51.自动泊车系统15用于接管车辆的自动靠边停车过程;
52.所示警示单元14用于在比结果存在较大差异时自动发出警示信号,提示过往行人和车辆保持安全距离。
53.报警单元18用于在车辆出现故障或严重事故时及时进行报警。
54.综上可得,本发明中:
55.通过设置仿真单元8、操作力学检测单元3、图像采集单元2、建模单元9、处置方案匹配单元7和对比单元11,首先采集驾驶员的踩踏刹车踏板和油门踏板的力度,转动方向盘的角度大小,并结合当时驾驶环境的图像信息判断所处的情况,根据驾驶员在不同情况下的安全驾驶习惯建立驾驶员的操作模型,然后可根据出现的突发情况数据进行仿真操作,判断出该驾驶员下意识情况下的操作,同时将该种情况通过处置方案匹配单元7匹配出最合适的处置方案,并将该方案与驾驶员的仿真操作进行对比,若是仿真操作与合理处置方案存在较大差异时,则管控单元13停止采用驾驶员的操作,并根据情况选择合适时机进行自动泊车,本发明可根据驾驶员的操作习惯判断其遇见突发情况下的操作是否安全合理,有效的降低了依靠紧张情绪下危险操作所带来的损失和安全隐患。
56.通过设置定位单元1、远程服务终端17和报警单元18,定位单元1将车辆位置信息采集发送至远程服务终端17,在遇见紧急情况需要救援时,可自动发送位置信息,方便远程救援和服务人员及时了解情况和组织救援过程,同时报警单元18可在遇见紧急情况时自动报警,使救援和服务过程更加及时精准。
57.其次:本发明公开实施例附图中,只涉及到与本公开实施例涉及到的结构,其他结构可参考通常设计,在不冲突情况下,本发明同一实施例及不同实施例可以相互组合;
58.最后:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。