1.本发明申请涉及爬壁机器人相关领域,具体涉及一种用于爬壁机器人在大斜率建筑表面移动的移动底盘结构。
背景技术:
2.随着社会的不断发展,各行各业的分工越来越明细,尤其是在现代化的大产业中,有的人每天就只拧一批产品的同一个部位上的一个螺母,有的人整天就是接一个线头、砸一根钉子,有的人工作环境非常的危险和恶劣,就像电影《摩登时代》中演示的那样,人们感到自己在不断异化,各种职业病逐渐产生,于是人们强烈希望用某种机器代替自己工作,因此人们研制出了机器人,用以代替人们去完成那些单调、枯燥或是危险的工作。在建筑的施工和维护中尤其如此,越来越多高风险和繁重的工作被机器人所替代,如高楼建筑的幕墙的清洗;石化储罐、海洋平台和桥梁等设施的检查、质量检测、切割、焊接、打磨;船舶、飞机的除锈、喷涂以及蒙皮的检测和核设施的维护检修等,逐步由施工机器人取代人工来从事危险繁重作业。
3.现有的在建筑物竖直表面作业的机器人结构普遍比较复杂,能实现的功能也比较单一,例如公开号为cn109572841a的专利申请公开的一种高层建筑清洗的爬壁机器人,其实现运动需要八个吸盘共同协作,同时不具有任何的越障能力,对作业面的平整度要求较高。再例如公开号为cn106388725a的专利申请公开的可越障踩障的壁面机器,其结构更为复杂,且只有一种跨越式的越障模式,同样受作业面的平整度的影响很大,同时改变运动方向也很困难。
技术实现要素:
4.针对背景技术中记载的现有的施工机器人存在的缺陷,本发明提出了一种爬壁机器人底盘,以克服现有技术中越障困难,结构复杂等技术问题,其具体包括底盘驱动单元、上移动架、下移动架和升降固定机构,其特征在于:具有多个底盘驱动单元,多个上移动架、多个下移动架和多个升降固定机构,多个上移动架和多个下移动架安装在多个底盘驱动单元之间,多个升降固定机构安装在多个上移动架和多个下移动架上,通过所述底盘驱动单元驱动上移动架或下移动架运动带动多个升降固定机构运动。
5.进一步的,底盘驱动单元包括,电机、安装座、连接板、联轴器、安装架、传动螺杆和导向柱;电机安装在安装座上,安装座通过连接板与安装架连接,安装架内沿其长度方向平行安装有传动螺杆和导向柱,电机的输出轴穿过安装座并通过联轴器和传动螺杆的动力输入轴连接,传动螺杆的两端通过轴承转动安装在安装架内,导向柱固定安装在安装架内,电机带动传动螺杆在安装架内转动。
6.进一步的,所述多个底盘驱动单元为四个,分别是左底盘驱动单元、右底盘驱动单元、前底盘驱动单元和后底盘驱动单元;左底盘驱动单元包括左电机、左安装座、左连接板、左联轴器、左安装架、左传动螺杆和左导向柱;右底盘驱动单元包括右电机、右安装座、右连
接板、右联轴器、右安装架、右传动螺杆和右导向柱;前底盘驱动单元包括前电机、前安装座、前连接板、前联轴器、前安装架、前传动螺杆和前导向柱;后底盘驱动单元包括后电机、后安装座、后连接板、后联轴器、后安装架、后传动螺杆和后导向柱;左底盘驱动单元、右底盘驱动单元、前底盘驱动单元和后底盘驱动单元相互连接构成方形结构的爬壁机器人底盘框架。
7.进一步的,包括两个上移动架和两个下移动架,其分别为左侧上移动架、右侧上移动架、前侧下移动架和后侧下移动架;每个上移动架均包括上移动架主动座、上移动架连接架和上移动架从动座,上移动架主动座上开设有螺纹孔和导向光孔,上移动架连接架上延其长度方向开设有滑动通槽,上移动架从动座上开设有导向光孔;下移动架包括,下移动架主动座、下移动架连接架和下移动架从动座,下移动架主动座上同样开设有螺纹孔和导向光孔,下移动架连接架上延其长度方向同样开设有滑动通槽,下移动架从动座上同样开设有导向光孔。
8.进一步的,左底盘驱动单元中左安装架的靠近动力输出端部设置有左侧上移动架的上移动架主动座,左安装架中的左传动螺杆与左侧上移动架中上移动架主动座上的螺纹孔螺纹传动连接,左安装架中的左导向柱与左侧上移动架中上移动架主动座上的导向光孔滑动连接;左底盘驱动单元中左安装架远离动力输出端部设置有右侧上移动架的上移动架从动座,左安装架中的左导向柱与右侧上移动架中上移动架从动座的导向光孔滑动连接。
9.进一步的,右底盘驱动单元中右安装架的靠近动力输出端部设置有右侧上移动架的上移动架主动座,右安装架中的右传动螺杆与右侧上移动架中上移动架主动座上的螺纹孔螺纹传动连接,右安装架中的右导向柱与右侧上移动架中上移动架主动座上的导向光孔滑动连接;右底盘驱动单元中右安装架远离动力输出端部设置有左侧上移动架的上移动架从动座,右安装架中的右导向柱与左侧上移动架中上移动架从动座的导向光孔滑动连接。
10.进一步的,前底盘驱动单元中前安装架的靠近动力输出端部设置有前侧下移动架的下移动架主动座,前安装架中的前传动螺杆与前侧下移动架中下移动架主动座上的螺纹孔螺纹传动连接,前安装架中的前导向柱与前侧下移动架中下移动架主动座上的导向光孔滑动连接;前底盘驱动单元中前安装架远离动力输出端部设置有后侧下移动架的下移动架从动座,前安装架中的前导向柱与后侧下移动架中下移动架从动座上的导向光孔滑动连接。
11.进一步的,后底盘驱动单元中后安装架的靠近动力输出端部设置有后侧下移动架的下移动架主动座,后安装架中的后传动螺杆与后侧下移动架中下移动架主动座上的螺纹孔螺纹传动连接,后安装架中的后导向柱与后侧下移动架中下移动架主动座上的导向光孔滑动连接;后底盘驱动单元中后安装架远离动力输出端部设置有前侧下移动架的下移动架从动座,后安装架中的后导向柱与前侧下移动架中下移动架从动座上的导向光孔滑动连接。
12.进一步的,左侧上移动架、右侧上移动架、前侧下移动架和后侧下移动架呈井字形排列在由左底盘驱动单元、右底盘驱动单元、前底盘驱动单元和后底盘驱动单元围成的方形空间中;左侧上移动架右侧上移动架、前侧下移动架和后侧下移动架上延其长度方向开设的滑动通槽的相交部分构成四个安装位,每个安装位上均安装有升降固定机构。
13.进一步的,升降固定机构包括升降驱动器、上部定位台、连接管、下部定位台、升降
杆、连接件和定位/释放器;升降驱动器安装在上部定位台上,上部定位台设置在上移动架的上移动架连接架的上部,上部定位台下部连接有连接管,连接管穿过上移动架连接架的滑动通槽,连接管的下部连接有下部定位台,下部定位台位于上移动架连接架和下移动架连接架之间的区域,其与上移动架连接架的下表面接触,与下移动架连接架的上表面接触,下部定位台的下部安装有升降杆,升降杆的初级结构穿过下移动架连接架的滑动通槽,升降杆的下部安装有连接件,连接件连接定位/释放器。
14.进一步的,上移动架为两边的上移动架主动座和上移动架从动座低中间的上移动架连接架高的
մ
形结构;下移动架为两边的下移动架主动座和下移动架从动座高中间的下移动架连接架低的凹形结构;左侧上移动架和右侧上移动架的
մ
形结构对应前侧下移动架和后侧下移动架的凹形结构。
15.进一步的,升降杆可以为电动推杆,升降螺杆、液压杆或者是气压杆结构,相应的升降驱动器可以为电机、液压泵、气压泵或者是液压/气压控制阀;定位/释放器可以选择为真空吸盘,电磁吸盘或者是机械爪。
16.一种用于建筑物上的消防/清洗/提升/焊接/安装/装载机器人,其特征在于采用上述的爬壁机器人底盘。
17.有益效果:在简化了现有技术中爬壁机器人结构的同时增加了其更多的使用功能,具有多种越障能力,该底盘结构能针对不同的障碍物类型采取不同的越障方式;改变运动方向灵活,向前、向后、向左和向右的运动方式控制简单,只要操纵不同的电机和升降机构配合就可实现相应的运动,且运动时改变运动方向很灵活不需要转弯;根据爬壁机器人的不同应用场景定位/释放器可以选择为真空吸盘,电磁吸盘或者是机械爪,能适应多种作业面的需要;可拓展能力强,可作为建筑竖直表面使用的通用运载设备,根据施工需要可以将该底盘应用于消防/清洗/提升/焊接/安装/装载机器人当中,有效降低单一机器人的研发成本。
附图说明
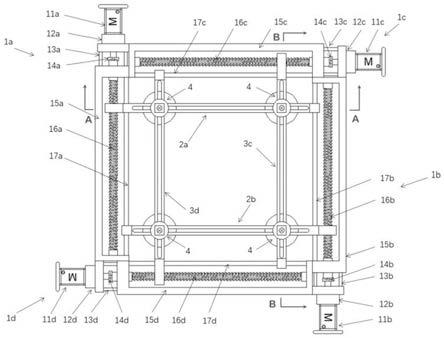
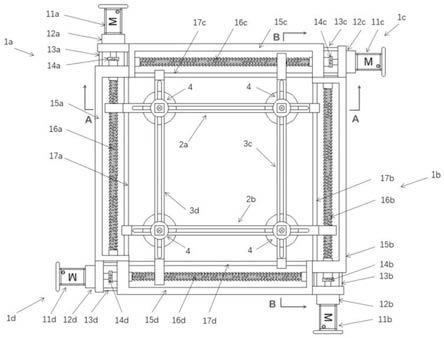
18.图1为爬壁机器人底盘主视结构图;图2为底盘驱动单元主视结构图;图3为上移动架和下移动架结构图;图4为上移动架和下移动架安装在爬壁机器人底盘上的结构示意图;图5为爬壁机器人底盘侧视图;图6为爬壁机器人底盘a
‑
a方向剖面图;图7为爬壁机器人底盘b
‑
b方向剖面图;图8为三种类型定位/释放器示意图;图9为前后运动的运动示意图;图10为第一种越障模式运动示意图;图11为第二种越障模式运动示意图;图12为第三种越障模式运动示意图。
19.附图标记说明1、底盘驱动单元;11、电机;12、安装座;13、连接板;14、联轴器;15、安装架;16、传
动螺杆;17、导向柱;2、上移动架;21、上移动架主动座;22、上移动架连接架;23、上移动架从动座;3、下移动架;31、下移动架主动座;32、下移动架连接架;33、下移动架从动座;4、升降固定机构;41、升降驱动器;42、上部定位台;43、连接管;44、下部定位台;45、升降杆;46、连接件;47、定位/释放器;471、真空吸盘;472、电磁吸盘;473、机械爪;5、安装位;6、滑动通槽;7、螺纹孔;8、导向光孔;9、障碍物1a、左底盘驱动单元;11a、左电机;12a、左安装座;13a、左连接板;14a、左联轴器;15a、左安装架;16a、左传动螺杆;17a、左导向柱;1b、右底盘驱动单元;11b、右电机;12b、右安装座;13b、右连接板;14b、右联轴器;15b、右安装架;16b、右传动螺杆;17b、右导向柱;1c、前底盘驱动单元;11c、前电机;12c、前安装座;13c、前连接板;14c、前联轴器;15c、前安装架;16c、前传动螺杆;17c、前导向柱;1d、后底盘驱动单元;11d、后电机;12d、后安装座;13d、后连接板;14d、后联轴器;15d、后安装架;16d、后传动螺杆;17d、后导向柱;2a、左侧上移动架;2b、右侧上移动架;3c、前侧下移动架;3d、后侧下移动架。
具体实施方式
20.实施例一参考附图1、2,该爬壁机器人底盘包括四个底盘驱动单元1,每个驱动单元1均包括电机11、安装座12、连接板13、联轴器14、安装架15、传动螺杆16和导向柱17;电机11安装在安装座12上,安装座12通过连接板13与安装架15连接,安装架15内沿其长度方向平行安装有传动螺杆16和导向柱17,电机11的输出轴穿过安装座并通过联轴器14和传动螺杆16的动力输入轴连接,传动螺杆16的两端通过轴承转动安装在安装架15内,导向柱17固定安装在安装架15内,电机11带动传动螺杆16在安装架15内转动。具体的每个底盘驱动单元1的安装架15连接另一个底盘驱动单元1靠近导向柱17一侧的连接板13构成方形结构的爬壁机器人底盘框架。电机11为步进电机、无刷直流电机或者是伺服电机等精确可控的电机。
21.将爬壁机器人底盘中的四个底盘驱动单元1根据其相对位置分别定义为左底盘驱动单元1a、右底盘驱动单元1b、前底盘驱动单元1c和后底盘驱动单元1d,其相关组件定义为:左底盘驱动单元1a包括左电机11a、左安装座12a、左连接板13a、左联轴器14a、左安装架15a、左传动螺杆16a和左导向柱17a;右底盘驱动单元1b包括右电机11b、右安装座12b、右连接板13b、右联轴器14b、右安装架15b、右传动螺杆16b和右导向柱17b;前底盘驱动单元1c包括前电机11c、前安装座12c、前连接板13c、前联轴器14c、前安装架15c、前传动螺杆16c和前导向柱17c;后底盘驱动单元1d包括后电机11d、后安装座12d、后连接板13d、后联轴器14d、后安装架15d、后传动螺杆16d和后导向柱17d。
22.参考附图1、3、4该爬壁机器人底盘还包括两个上移动架2和两个下移动架3;上移动架2包括上移动架主动座21、上移动架连接架22和上移动架从动座23,上移动架主动座21上开设有螺纹孔7和导向光孔8,上移动架连接架22上沿其长度方向开设有滑动通槽6,上移动架从动座23上开设有导向光孔8;下移动架3包括下移动架主动座31、下移动架连接架32和下移动架从动座33,下移动架主动座31上同样开设有螺纹孔7和导向光孔8,下移动架连
接架32上沿其长度方向同样开设有滑动通槽6,下移动架从动座33上同样开设有导向光孔8;上移动架2为两边的上移动架主动座21和上移动架从动座23低中间的上移动架连接架22高的
մ
形结构;下移动架3为两边的下移动架主动座31和下移动架从动座33高中间的下移动架连接架32低的凹形结构。将爬壁机器人底盘中的两个上移动架2和两个下移动架3根据其相对位置分别定义为左侧上移动架2a、右侧上移动架2b、前侧下移动架3c和后侧下移动架3d。
23.参考附图1、4,四个底盘驱动单元1和两个上移动架2以及两个下移动架3的安装关系为:左底盘驱动单元1a中左安装架15a的靠近动力输出端部设置有左侧上移动架2a的上移动架主动座21,左安装架15a中的左传动螺杆16a与左侧上移动架2a中上移动架主动座21上的螺纹孔7螺纹传动连接,左安装架15a中的左导向柱17a与左侧上移动架2a中上移动架主动座21上的导向光孔8滑动连接;左底盘驱动单元1a中左安装架15a远离动力输出端部设置有右侧上移动架2b的上移动架从动座23,左安装架15a中的左导向柱17a与右侧上移动架2b中上移动架从动座23的导向光孔8滑动连接。
24.右底盘驱动单元1b中右安装架15b的靠近动力输出端部设置有右侧上移动架2b的上移动架主动座21,右安装架15b中的右传动螺杆16b与右侧上移动架2b中上移动架主动座21上的螺纹孔7螺纹传动连接,右安装架15b中的右导向柱17b与右侧上移动架2b中上移动架主动座21上的导向光孔8滑动连接;右底盘驱动单元1b中右安装架15b远离动力输出端部设置有左侧上移动架2a的上移动架从动座23,右安装架15b中的右导向柱17b与左侧上移动架2a中上移动架从动座23的导向光孔8滑动连接。
25.前底盘驱动单元1c中前安装架15c的靠近动力输出端部设置有前侧下移动架3c的下移动架主动座31,前安装架15c中的前传动螺杆16c与前侧下移动架3c中下移动架主动座31上的螺纹孔7螺纹传动连接,前安装架15c中的前导向柱17c与前侧下移动架3c中下移动架主动座31上的导向光孔8滑动连接;前底盘驱动单元1c中前安装架15c远离动力输出端部设置有后侧下移动架3d的下移动架从动座33,前安装架15c中的前导向柱17c与后侧下移动架3d中下移动架从动座33上的导向光孔8滑动连接。
26.后底盘驱动单元1d中后安装架15d的靠近动力输出端部设置有后侧下移动架3d的下移动架主动座31,后安装架15d中的后传动螺杆16d与后侧下移动架3d中下移动架主动座31上的螺纹孔7螺纹传动连接,后安装架15d中的后导向柱17d与后侧下移动架3d中下移动架主动座31上的导向光孔8滑动连接;后底盘驱动单元1d中后安装架15d远离动力输出端部设置有前侧下移动架3c的下移动架从动座33,后安装架15d中的后导向柱17d与前侧下移动架3c中下移动架从动座33上的导向光孔8滑动连接。
27.左侧上移动架2a、右侧上移动架2b、前侧下移动架3c和后侧下移动架3d呈井字形排列在由左底盘驱动单元1a、右底盘驱动单元1b、前底盘驱动单元1c和后底盘驱动单元1d围成的方形空间中,左侧上移动架2a和右侧上移动架2b的
մ
形结构对应前侧下移动架3c和后侧下移动架3d的凹形结构;左侧上移动架2a、右侧上移动架2b、前侧下移动架3c和后侧下移动架3d上沿其长度方向开设的滑动通槽6的相交部分构成四个安装位5,每个安装位上均安装有升降固定机构4。
28.参考附图1、5
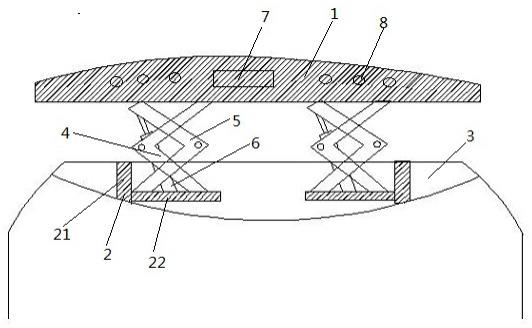
‑
8,该爬壁机器人底盘的升降固定机构4包括升降驱动器41、上部定位台42、连接管43、下部定位台44、升降杆45、连接件46和定位/释放器47。升降固定机构4在
安装位5的安装方式为: 升降驱动器41安装在上部定位台42上,上部定位台42设置在上移动架2的上移动架连接架22的上部,上部定位台42为圆形、矩形或者其它规则几何形状,其与上移动架连接架22接触的最小尺寸均大于滑动通槽6的宽度,上部定位台42与上移动架连接架22的上表面为可滑动接触,上部定位台42下部连接有连接管43,连接管43穿过上移动架连接架22的滑动通槽6,连接管43的下部连接有下部定位台44,下部定位台44位于上移动架连接架22和下移动架连接架32之间的区域,下部定位台44为圆形、矩形或者其它规则几何形状,其与上移动架连接架22的下表面接触,与下移动架连接架32的上表面接触,其与上移动架连接架22和下移动架连接架32接触的最小尺寸均大于其上滑动通槽6的宽度,下部定位台44与上移动架连接架22和下移动架连接架32均为可滑动接触,下部定位台44的下部安装有升降杆45,升降杆45的初级结构穿过下移动架连接架32的滑动通槽6,升降杆45的下部安装有连接件46,连接件46连接定位/释放器47。连接件46可以为铰链、球副或者是电动关节结构,升降杆45可以为电动推杆,升降螺杆、液压杆或者是气压杆结构,相应的升降驱动器41可以为电机、液压泵、气压泵或者是液压/气压控制阀(例如电磁换向阀等)。根据该爬壁机器人的不同应用场景定位/释放器47可以选择为真空吸盘471(光滑表面),电磁吸盘472(铁磁性表面)或者是机械爪473(具有可抓持物的表面,例如具有网装结构、突起结构,柱状或者缆装结构)。该爬壁机器人底盘还包括图中未示出的控制系统以及定位/释放器47的相应组件。
29.该爬壁机器人底盘可根据实际施工需要安装多种施工设备,包括但不限于:表面清洗设备,焊接设备,检测设备,提升设备或者是载人设备等。
30.参考附图1、9
‑
12,该爬壁机器人底盘的工作原理和控制方法为,通过控制该底盘上左底盘驱动单元1a的左电机11a、右底盘驱动单元1b的右电机11b、前底盘驱动单元1c的前电机11c和后底盘驱动单元1d的后电机11d来控制四个升降固定机构4在由左底盘驱动单元1a、右底盘驱动单元1b、前底盘驱动单元1c和后底盘驱动单元1d围成的方形空间中运动。
31.具体的,通过控制左电机11a的正反转带动左传动螺杆16a正反转带动左侧上移动架2a前后运动,从而可控制前部的两个升降固定机构4做前后运动;通过控制右电机11b的正反转带动右传动螺杆16b正反转带动右侧上移动架2b做前后运动,从而可控制后部的两个升降固定机构4做前后运动;通过控制前电机11c正反转带动前传动螺杆16c正反转带动前侧下移动架3c左右运动,从而可控制右侧的两个升降固定机构4做左右运动;通过控制后电机11d正反转带动后传动螺杆16d正反转带动后侧下移动架3d左右运动,从而可控制左侧的两个升降固定机构4做左右运动。需要注意的是,在控制爬壁机器人底盘运动时,同一时刻左电机11a、右电机11b、前电机11c和后电机11d至多有一个处于转动状态。
32.其工作模式包括:移动模式、越障模式、升降模式和悬停模式。
33.具体的,移动模式包括向前、向后、向左和向右四种移动方式。参考附图9向前移动时控制左电机11a固定不转动,此时前部的两个升降固定机构4保持不动,其中的定位/释放器47和接触面保持定位状态;控制后部的两个升降固定机构4的定位/释放器47处于释放状态,控制后部的两个升降固定机构4的升降杆45上升一段距离,此时后部的两个升降固定机构4的定位/释放器47离开接触面一段距离,控制右电机11b反传带动右传动螺杆16b反转,从而带动右侧上移动架2b向远离动力输出端部运动,当后部的两个升降固定机构4运动靠近前部的两个升降固定机构4时,控制右电机11b停止转动,控制后部的两个升降固定机构4
的升降杆45伸长一段距离,使得定位/释放器47接触物体表面,接着控制定位/释放器47和接触面进入定位状态,然后控制前部的两个升降固定机构4的定位/释放器47处于释放状态,控制前部的两个升降固定机构4的升降杆45上升一段距离,此时前部的两个升降固定机构4的定位/释放器47离开接触面一段距离,控制右电机11b正转带动右传动螺杆16b正转,从而带动右侧上移动架2b向靠近动力输出端部做相对运动,由于后部的两个升降固定机构4处于固定状态,因此,相当于右侧上移动架2b相对于物体表面不移动,而整个爬壁机器人底盘向前进行运动,当右侧上移动架2b快要移动到动力输出端部时,右电机11b停止转动,控制前部的两个升降固定机构4的升降杆45伸长一段距离,使得定位/释放器47接触物体表面,接着控制定位/释放器47和接触面进入定位状态,完成一个周期的前进运动,重复上述运动即可使得该爬壁机器人底盘持续向前运动。同理,通过控制控制左电机11a的正反转带动左传动螺杆16a正反转带动左侧上移动架2a前后运动,并配合前部两个升降固定机构4和后部的两个升降固定机构4的定位/释放从而实现向后运动;通过控制前电机11c正反转带动前传动螺杆16c正反转带动前侧下移动架3c左右运动并配合左部两个升降固定机构4和右部的两个升降固定机构4的定位/释放从而实现向左运动;通过控制后电机11d正反转带动后传动螺杆16d正反转带动后侧下移动架3d左右运动并配合右部两个升降固定机构4和左部的两个升降固定机构4的定位/释放从而实现向右运动。通过控制电机转速可控制该爬壁机器人底盘的运动速度。向后、向左和向右的运动方式和向前类似,只要操纵不同的电机和升降机构配合就可实现相应的运动,且运动时改变运动方向很灵活不需要转弯。
34.越障模式,参考附图10,以向前运动为例,当遇到的障碍物9为中间隆起结构,隆起部的宽度大于目前左右两个升降固定机构4之间的距离时,先控制右部的两个升降固定机构4的定位/释放器47处于释放状态,接着右部的两个升降固定机构4的升降杆45上升一段距离,此时右部的两个升降固定机构4的定位/释放器47离开接触面一段距离,控制前电机11c正转带动前传动螺杆16c正转带动前侧下移动架3c向靠近动力输出端部运动,带动右部的两个升降固定机构4向右运动,到达合适的位置放下定位/释放器47与接触面进入定位状态;接着控制左部的两个升降固定机构4的定位/释放器47处于释放状态,接着左部的两个升降固定机构4的升降杆45上升一段距离,此时左部的两个升降固定机构4的定位/释放器47离开接触面一段距离,控制后电机11d正转带动后传动螺杆16d正转带动后侧下移动架3d向靠近动力输出端部运动,带动左部的两个升降固定机构4向左运动,到达合适的位置放下定位/释放器47与接触面进入定位状态,此时左右两个升降固定机构4之间的距离大于隆起部的宽度,再执行向前移动模式即可越过障碍物。此为变宽模式。
35.还以向前运动为例,参考附图11,当遇到的障碍物9为两边障碍物,其中间通过的通道宽度小于左右两个升降固定机构4之间的距离时先控制右部的两个升降固定机构4的定位/释放器47处于释放状态,接着右部的两个升降固定机构4的升降杆45上升一段距离,此时右部的两个升降固定机构4的定位/释放器47离开接触面一段距离,控制前电机11c反转带动前传动螺杆16c反转带动前侧下移动架3c向远离动力输出端部运动,带动右部的两个升降固定机构4向中间位置运动,到达合适的位置放下定位/释放器47与接触面进入定位状态;接着控制左部的两个升降固定机构4的定位/释放器47处于释放状态,接着左部的两个升降固定机构4的升降杆45上升一段距离,此时左部的两个升降固定机构4的定位/释放器47离开接触面一段距离,控制后电机11d反转带动后传动螺杆16d反转带动后侧下移动架
3d向远离动力输出端部运动,带动左部的两个升降固定机构4向中间位置运动,到达合适的位置放下定位/释放器47与接触面进入定位状态,此时左右两个升降固定机构4之间的距离小于两边障碍通道宽度,再执行向前移动模式即可越过障碍物。此为变窄模式。
36.参考附图12当遇到的障碍物9的长度大于该爬壁机器人底盘的长度,但是宽度和高度较小时,控制后部远离障碍物的两个升降固定机构4的定位/释放器47离开接触面一段距离,控制右电机11b反转使得后部的两个升降固定机构4向前部的两个升降固定机构4运动,当接近前部的两个升降固定机构4时控制右电机11b停转,控制后部的两个升降固定机构4的定位/释放器47定位在接触面上;控制前部的两个升降固定机构4的定位/释放器47释放,前部两个升降固定机构4的升降杆45缩短,使得前部的两个定位/释放器47离表面高度大于障碍物的高度,控制右电机11b正转使得该底盘向前运动,前部两个升降固定机构4越过障碍物;当前部两个升降固定机构4越过障碍物一定距离后右电机11b停止运动,前部两个升降固定机构4的升降杆45伸长,使得前部的两个定位/释放器47接触表面并定位;控制后部的两个升降固定机构4的定位/释放器47释放,后部两个升降固定机构4的升降杆45缩短,使得后部的两个定位/释放器47离表面高度大于障碍物的高度,控制右电机11b反转使得后部的两个升降固定机构4向前部的两个升降固定机构4运动,使得后部两个升降固定机构4越过障碍物,当后部两个升降固定机构4接近前部的两个升降固定机构4时右电机11b停止运动,后部两个升降固定机构4的升降杆45伸长,使得后部的两个定位/释放器47接触表面并定位,实现对障碍物9的跨越。然后执行后续的运动模式。此为跨越模式当障碍物9隆起高度大于目前爬壁机器人底盘离接触面的高度时,先控制四个升降固定机构4的定位/释放器47处于定位状态,再分别控制四个升降固定机构4的升降杆45伸长,抬升整个爬壁机器人底盘离接触面的高度高于障碍物9隆起高度,然后再执行其它操作,该操作一般配合上面三种越障模式进行工作,先抬高底盘再移动升降固定机构4。
37.悬停模式,控制四个升降固定机构4的定位/释放器47处于定位状态。此时可执行安装在筑施工机器人底盘上的相关施工设备进行相应的施工操作。
38.以上描述仅为本技术的较佳实施方式以及对所运用技术原理的说明。需要注意的是:本文中所说的上、下、前、后、左、右等指示方位的字词仅是针对所示结构在对应附图中位置而言。本文中为零部件所编序号本身,例如:a、b、c、d等,仅用于区分所描述的对象,不具有任何顺序或技术含义。本领域技术人员应当理解,本技术中所涉及的发明范围,并不限于上述技术特征的特定组合而成的技术方案,同时也应涵盖在不脱离所述发明构思的情况下,由上述技术特征或其等同特征进行任意组合而形成的其它技术方案。例如上述特征与本技术中公开的(但不限于)具有类似功能的技术特征进行互相替换而形成的技术方案。本技术说明书附图仅为结构和功能示意图,其并不代表真是的产品尺寸、比例和具体结构。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。