基于ros的仿真控制平台及外骨骼机器人仿真控制系统
1.技术领域
2.本发明涉及外骨骼机器人技术领域,尤其涉及一种基于ros的仿真控制平台及外骨骼机器人仿真控制系统。
背景技术:
3.助力下肢外骨骼机器人是一种穿戴式人机一体化机械装置,可以通过电动等方式提供助力以增强人体力量输出,适用于辅助重体力劳动者工作或者助老助残等场景。同时,外骨骼机器人还能运用于单兵作战,应急救援等特种领域,用于在常规车辆无法驶入场景下,辅助救援人员或者战士背负相关设备长途行走。因此,外骨骼机器人技术在未来的智能人机交互、人机共融领域具有重要的意义和价值。
4.下肢外骨骼机器人的运动控制是其能辅助穿戴者完成背负运输任务的前提和保障,是外骨骼机器人的关键技术之一。由于外骨骼机器人穿戴人员在环及运行环境的复杂性,识别穿戴者运动意图及提高其控制性能成为攻克外骨骼机器人技术的关键。然而,在外骨骼机器人研制和运行过程中,由于操作人员在环,常规的离线编程及调试的方法在效率及安全性方面难以很好的保障。因此,针对上述问题,有必要提出进一步的解决方案。
技术实现要素:
5.本发明的目的在于提供一种基于ros的仿真控制平台及外骨骼机器人仿真控制系统,以克服现有技术中存在的不足。
6.为实现上述发明目的,本发明提供一种基于ros的仿真控制平台,其用于外骨骼机器人的仿真控制,所述基于ros的仿真控制平台包括:控制模块;数据采集模块,其采集外骨骼机器人反馈的数据,并与所述控制模块数据传输;仿真显示模块,其构建外骨骼机器人模型,并基于反馈的数据在所述控制系统的控制下,对所述外骨骼机器人模型进行仿真显示;运动意图检测模块,其包括:若干运动意图检测单元,所述若干运动意图检测单元订阅所述外骨骼机器人反馈的数据,并进行人体运动意图识别。
7.作为本发明基于ros的仿真控制平台的改进,所述数据采集模块借助具有的pci
‑
can板卡实时采集外骨骼机器人端的数据。
8.作为本发明基于ros的仿真控制平台的改进,所述数据采集模块将采集的数据以ros话题形式将其发布出去,同时订阅所述控制模块的关节控制信息,并将其发送给外骨骼机器人。
9.作为本发明基于ros的仿真控制平台的改进,所述控制模块支持自定义外骨骼动力学数学模型或者开源三维物理仿真平台。
10.作为本发明基于ros的仿真控制平台的改进,所述控制模块支持开源三维物理仿真平台时,按照如下步骤执行仿真控制流程:将外骨骼三维结构图导入所述开源三维物理仿真平台,然后对构建的外骨骼机器人模型信息参数进行调整优化,同时借助开源三维物理仿真平台具有的控制算法节点,使用低阶控制算法对平台内的模型及实际系统进行控制仿真;进行相关力矩深度控制算法的验证,同时在仿真平台内观测仿真运行效果,在完成控制算法验证后,借助发往下层外骨骼端的控制信息,在实际系统端进行在线算法验证测试;算法验证通过后,基于实际系统的算力配置,自行构建外骨骼动力学优化模型,并在仿真平台进行对比验证。
11.作为本发明基于ros的仿真控制平台的改进,所述pc仿真控制平台在外骨骼人机耦合运动过程中,将运动状态拆解为:左脚腾空右脚支撑状态、双脚支撑状态以及右脚腾空左脚支撑状态。
12.作为本发明基于ros的仿真控制平台的改进,单腿支撑动力学模型:式中:为外骨骼各杆件的动能之和;为外骨骼各杆件的重力势能之和;为外骨骼膝关节的弹性势能和;l为拉格朗日函数,等于系统的总动能与重力势能、总弹性势能之差;分别表征款膝踝关节的广义角速度;分别表征矢状面及额状面系统的广义坐标;分别表征款膝踝关节的合力,即关节电机驱动力和人机交互力。
13.作为本发明基于ros的仿真控制平台的改进,外骨骼支撑相的6连杆动力学方程为:式中,表示矢状面内机器人的惯性张量阵;是一个6x6 的科氏力和离心力矩阵;是一个6 x1 的重力矩阵;是弹性力矩阵;,,分别表示 6x1维的广义位置,广义速度及广义加速度。
14.作为本发明基于ros的仿真控制平台的改进,双脚支撑状态中,左右两髋关节的输出力矩可根据外骨骼整体重心在两脚着地点连线上的投影点到两脚之间距离,的比例分配:
,为外骨骼系统左右两髋关节所需总扭矩;其他关节扭矩由5连杆动力学推导得出:式中,为外骨骼各连杆的动能和,包含左右小腿、左右大腿、躯干;为外骨骼各连杆的势能和,包含左右小腿、左右大腿、躯干;es为系统膝关节的弹性势能。
15.为实现上述发明目的,本发明提供一种基于ros的下肢外骨骼机器人仿真控制系统,其包括:下层外骨骼端、如上所述的基于ros的仿真控制平台;所述下层外骨骼端包括:人体姿态传感模块、关节驱动电机模块以及交互力检测模块,所述基于ros的仿真控制平台能够接收来自所述人体姿态传感模块和交互力检测模块反馈的数据;所述人体姿态传感模块包括:设置于背部背架的六轴惯性测量传感、设置于左右腿膝关节处的角度传感器、设置于左右足底的压力传感器。
16.与现有技术相比,本发明的有益效果是:本发明提供一种基于ros的仿真控制平台及外骨骼机器人仿真控制系统,采用该系统可以缩短外骨骼软件控制算法的开发周期,通过模拟真实外骨骼机器人模型,可实现对外骨骼机器人控制算法的实验验证,同时也可提供控制器参数的调试。
附图说明
17.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明中记载的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
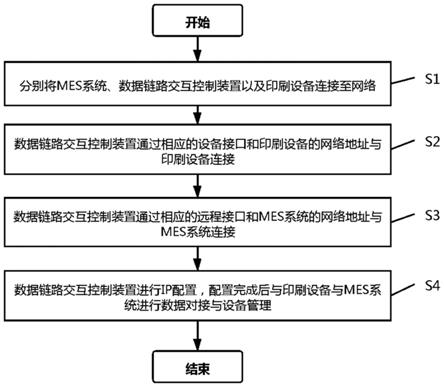
18.图1为本发明基于ros的外骨骼机器人仿真控制系统一实施例的模块图;图2为控制模块支持开源三维物理仿真平台时的仿真控制流程图。
具体实施方式
19.下面结合各实施方式对本发明进行详细说明,但应当说明的是,这些实施方式并非对本发明的限制,本领域普通技术人员根据这些实施方式所作的功能、方法、或者结构上的等效变换或替代,均属于本发明的保护范围之内。
20.如图1所示,本发明一实施例提供一种基于ros的外骨骼机器人仿真控制系统,其采用模块化的分布式主从控制硬件架构。该外骨骼机器人仿真控制系统包括:上层基于ros的仿真控制平台100以及下层外骨骼端200。上层基于ros的仿真控制平台100进行仿真控
制、任务决策,下层外骨骼端200根据控制平台的指令进行控制,整体系统呈现高内聚、低耦合特点。
21.具体地,pc仿真控制平台依托运行于实时linux操作系统的ros环境搭建,其包括:控制模块101、数据采集模块102、仿真显示模块103以及运动意图检测模块104。
22.其中,控制模块101可以为一pc主机,其主要负责外骨骼机器人系统的传感数据采集、运动仿真及控制。同时,为保障实时性,pc主机上运行ros2系统,该版本系统通信采用了基于数据分发服务(dds)的通信框架。
23.数据采集模块102,其采集下层外骨骼端200反馈的数据,并与所述控制模块101数据传输。该数据采集模块102借助具有的pci
‑
can板卡实时采集外骨骼机器人端的数据。同时,数据采集模块102将采集的数据以ros话题形式将其发布出去,同时订阅控制模块101的关节控制信息,并将其发送给下层外骨骼端200。
24.仿真显示模块103用于构建外骨骼机器人模型,并基于反馈的数据在所述控制系统的控制下,对所述外骨骼机器人模型进行仿真显示。具体地,仿真显示模块103可基于实际外骨骼机器人物理模型编写urdf文件,构建外骨骼机器人模型,然后将外骨骼传感信息导入ros系统内的机器人仿真环境rviz,可以在外骨骼调试运行过程中直接显示当前外骨骼机器人的运动仿真画面。
25.运动意图检测模块104用于进行人体运动状态检测及运动意图识别。该运动意图检测模块104包括:若干运动意图检测单元,所述若干运动意图检测单元订阅所述外骨骼机器人反馈的数据,并进行人体运动意图识别。
26.进一步地,控制模块101支持自定义外骨骼动力学数学模型或者开源三维物理仿真平台(gazebo)。gazebo配备模拟真实物理引擎ode,ode是一款具有工业品质的刚体动力学库,能够给外骨骼机器人运行创建虚拟仿真环境;另外,gazebo支持传感器仿真,还具备丰富的可拓展插件。
27.如图2所示,当控制模块101支持开源三维物理仿真平台时,按照如下步骤执行仿真控制流程:s1、直接将外骨骼三维结构图通过sw2urdf插件导入gazebo仿真平台,然后基于实际外骨骼系统进行外骨骼模型质量等信息参数的调整优化。同时可打开控制算法节点,使用低阶控制算法对平台内的模型及实际系统进行控制仿真,基于运行效果辨识及修正模型参数,使得仿真平台内的刚体动力学模型更逼近实际外骨骼系统。
28.s2、可直接使用gazebo的ros_control进行相关力矩深度控制算法的验证研究,同时在仿真平台内观测仿真运行效果。在完成控制算法验证后,使用者可使能发往下层外骨骼端200的控制信息,在实际系统端进行在线算法验证测试。
29.s3、算法验证通过后,可基于实际系统的算力配置,自行构建外骨骼动力学优化模型替换gazebo节点以降低系统负载需求,并在仿真平台进行对比验证。
30.在外骨骼人机耦合运动过程中,基于人行走的节律性,可将运动状态拆解为三种基本的运动构型:左脚腾空右脚支撑状态、双脚支撑状态、右脚腾空左脚支撑状态。人机耦合运动过程即是此三种典型运动构型的切换过程。伴随着运动及运动构型的切换,系统的动力学结构会发生改变。因此外骨骼机器人动力学方程需根据不同的运动构型分别建立。
31.对于单腿支撑动力学模型:
式中:为外骨骼各杆件的动能之和;为外骨骼各杆件的重力势能之和;为外骨骼膝关节的弹性势能和;l为拉格朗日函数,等于系统的总动能与重力势能、总弹性势能之差;分别表征款膝踝关节的广义角速度;分别表征矢状面及额状面系统的广义坐标;分别表征款膝踝关节的合力,即关节电机驱动力和人机交互力;在单腿支撑相环节,系统可看做一个6连杆模型,包括左右小腿杆、左右大腿杆、躯干及支撑脚足部,4个主动自由度位于左右髋膝关节。
32.由此外骨骼支撑相的6连杆动力学方程为:式中,表示矢状面内机器人的惯性张量阵;是一个6x6 的科氏力和离心力矩阵;是一个6 x1 的重力矩阵;是弹性力矩阵;,,分别表示 6x1维的广义位置,广义速度及广义加速度;人体对外骨骼施加的力为,由系统人机交互力传感测得,为6x1矩阵;j为 6x6矩阵,代表外骨骼矢状面上受到的笛卡尔空间力到机器人关节空间的映射。
33.对于双脚支撑状态:左右两髋关节的输出力矩可根据外骨骼整体重心在两脚着地点连线上的投影点到两脚之间距离,的比例分配:,为外骨骼系统左右两髋关节所需总扭矩;其他关节扭矩由5连杆动力学推导得出:式中,为外骨骼各连杆的动能和,包含左右小腿、左右大腿、躯干;为外骨骼各连杆的势能和,包含左右小腿、左右大腿、躯干;
es为系统膝关节的弹性势能。
34.下层外骨骼端200包含外骨骼髋膝关节电机模组控制系统,各关节电机的驱动器集成于关节控制节点板内,在底层及可实现关节电机的位置、速度及力矩模式操作设置。下层外骨骼端200与上层基于ros的仿真控制平台100采用can总线连接,协议层使用canopen协议,支持灵活增减髋膝主动关节电机节点。
35.具体地,下层外骨骼端200包括:人体姿态传感模块201、关节驱动电机模块202以及交互力检测模块203。
36.基于ros的仿真控制平台能够接收来自人体姿态传感模块201和交互力检测模块203反馈的数据。人体姿态传感模块201包括:设置于背部背架的六轴惯性测量传感、设置于左右腿膝关节处的角度传感器、设置于左右足底的压力传感器。各传感器对应反馈给上述运动意图检测模块104中的若干运动意图检测单元,以作为进行人体运动状态检测及运动意图识别的数据基础。关节驱动电机模块202可根据需要设置为多组。
37.一个实施方式中,背部背架设imu六轴惯性测量传感一枚,用于检测上躯干空间姿态信息;左右两腿的膝踝关节各内置一颗绝对编码器,共计6枚,可用于检测膝踝关节角度信息;同时外骨骼左右足底的设有足底压力传感器1枚,共计2枚,可用于检测抬落腿状态。基于此,开发人员可在线采集外骨骼端传感信息进行穿戴外骨骼系统的站坐、行走、弯腰等状态解析。
38.综上所述,本发明提供一种基于ros的仿真控制平台及外骨骼机器人仿真控制系统,采用该系统可以缩短外骨骼软件控制算法的开发周期,通过模拟真实外骨骼机器人模型,可实现对外骨骼机器人控制算法的实验验证,同时也可提供控制器参数的调试。
39.对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。
40.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。