带有可易于调节步进高度的缝纫机
1.相关申请
2.不适用(n/a)
技术领域
3.本发明总体上涉及缝纫机,且更具体地涉及具有缝制相对较薄的材料和相对较厚的材料的能力的工业缝纫机。
背景技术:
4.工业缝纫机长期以来一直用于将相对较薄的材料和相对较厚的材料缝在一起。相对较厚的材料的一个实例是床垫板。用于缝制这种较厚材料的缝纫机必须适于提供足够的竖直间隙,使材料能够穿过机器的喉部。喉板或针板,即在缝制材料时所述材料搁置在其上的板,限定了材料必须装入机器喉部的空间的底部平面。机器可以缝制的材料的厚度取决于喉板与针、压脚和上走针脚或上送料卡爪(dog)在其行程上限时之间的间隙。
5.特别适用于缝制较厚的材料的一种类型工业缝纫机采用上走针脚和下送料卡爪(有时称为“顶部和底部送料”),并被配置为赋予压脚和走针脚的异相往复运动。美国专利第4,449,464号和第5,309,854号中展示了这种缝纫机。在这种类型的缝纫机中,上走针脚在缝纫过程中以或多或少的椭圆运动行进,并且因此具有水平运动分量(步进长度或送料长度)和竖直运动分量(步进高度)。虽然当前的这种缝纫机可以具有用于容易地调整上走针脚的送料长度的装置,但是上走针脚的步进高度的调整通常更加麻烦和耗时。这种机器的实例是pegasus ext3200系列和ext5200系列工业缝纫机。这些机器有一个组合旋钮和杠杆来调整送料长度。但是,要调整步进高度,合格的技术人员必须转动机器皮带轮,松开某些螺纹件,操纵上送料卡爪和连杆,为期望的材料厚度设置上送料卡爪的高度,一旦达到正确的高度,重新拧紧螺丝。
6.因此,希望提供一种缝纫机,该缝纫机利用上走针脚和下送料卡爪并赋予压脚和走针脚的异相往复运动,具有易于调节步进高度的装置,以便更快速、更轻松地配置机器以缝制较厚的材料。
技术实现要素:
7.在一个方面,一种缝纫机包括曲轴、第一驱动轴、第二驱动轴、针组件、压脚和上走针脚。第一曲柄臂组件将曲轴连接到第一驱动轴。第一连杆组件将第一驱动轴连接到针组件。第二曲柄臂组件将第一驱动轴连接到第二驱动轴。第二连杆组件将第二驱动轴连接到压脚和上走针脚。第二连杆组件被配置为引起压脚和上走针脚的异相往复运动。第二曲柄臂组件具有由操作者可选择地调节的可变长度以产生上走针脚的至少第一和第二不同的步进高度。
8.可变长度的第二曲柄臂还可产生压脚的至少第一和第二不同的最高行程极限。
9.第一曲柄臂组件可包括第一曲柄臂和第一曲柄杆。第一曲柄臂可在第一端枢转至
曲轴。第一曲柄杆可以在第一端处牢固地固定到第一驱动轴。第一曲柄臂和第一曲柄杆可在各自的第二端处枢转地连接。
10.第二曲柄臂组件可包括第二曲柄臂和第二曲柄杆。第二曲柄臂可在第一端枢转至第一曲柄杆。第二曲柄杆可以在第一端处牢固地固定到第二驱动轴。第二曲柄臂和第二曲柄杆可在各自的第二端处平移且枢转地连接。
11.第二曲柄臂和第二曲柄杆中的一个可以包括销并且第二曲柄臂和第二曲柄杆中的另一个可以包括细长槽。销可以行进(ride in)于槽中。销沿着槽的长度的位置可由操作者有选择地调节。优选地,第二曲柄臂包括销并且第二曲柄杆包括槽。
12.缝纫机还可以包括导螺杆,所述导螺杆可由操作者可选择地旋转并被配置为沿槽的长度平移销,从而提供走针脚的低步进高度、走针脚的高步进高度以及在低步进高度和高步进高度之间的多个步进高度。换言之,导螺杆提供了在低步进高度和高步进高度之间具有基本上连续或无限的步进高度可调性的能力。
13.导螺杆可以包括旋钮,该旋钮可由操作者手动旋转以旋转导螺杆。导螺杆可包括响应导螺杆的旋转而大致水平平移的阻挡块。销的一端部可以行进于阻挡块中。第二连杆组件、第一曲柄臂组件和第二曲柄臂组件可配置成响应于阻挡块大致水平地平移而使销的端部在阻挡块中大致竖直地平移。这样做时,可以可选择地改变第二驱动轴的中心线和销的中心线之间的距离。阻挡块可包括大致竖直延伸的通道。销的端部可具有与通道的横截面匹配的横截面。
14.可选地,缝纫机可包括气缸,所述气缸可由操作者致动并被配置为沿槽的长度平移销,从而提供走针脚的低步进高度和走针脚的高步进高度。类似于导螺杆实施例,气缸可以包括上述阻挡块,该阻挡块响应于气缸的活塞杆的平移而大致水平地平移。
15.在另一方面,缝纫机包括曲轴、驱动轴、针组件、压脚和上走针脚。曲柄臂将曲轴和驱动轴连接起来。连杆组件将驱动轴连接到针组件、压脚和上走针脚。连杆组件被配置为引起压脚和上走针脚的异相往复运动。调节机构可由操作者可选择地调节,该调节机构改变连杆组件的两个枢轴之间的中心线到中心线的距离,以产生上走针脚的至少第一和第二不同的步进高度。
16.连杆机构的第一连杆和第二连杆可以在各自的端部处平移地和枢转地连接,以提供连杆组件的两个枢轴之间的可变的中心线到中心线的距离。第一和第二连杆中的一个可以包括销并且第一和第二连杆中的另一个可以包括细长槽。销可以行进于槽中。销沿着槽的长度可选择的位置可由操作者调节。
17.缝纫机可包括导螺杆,所述导螺杆可由操作者可选择地旋转并被配置为沿槽的长度平移所述销,从而提供走针脚的低步进高度、走针脚的高步进高度以及低步进高度和高步进高度之间的多个步进高度。
18.导螺杆可以包括旋钮,该旋钮可由操作者手动旋转以旋转导螺杆。导螺杆可包括响应导螺杆的旋转而大致水平平移的阻挡块。销的一端部可以行进于阻挡块中。连杆组件可被配置为响应于阻挡块大致水平地平移而使销的端部在阻挡块中大致竖直地平移。这样做时,连杆组件的两个枢轴之间的中心线到中心线的距离可以有选择地改变。阻挡块可包括大致竖直延伸的通道。销的端部可具有与通道的横截面匹配的横截面。
19.可选地,缝纫机可包括气缸,所述气缸可由操作者致动并被配置为沿槽的长度平
移销,从而提供走针脚的低步进高度和走针脚的高步进高度。类似于导螺杆实施例,气缸可以包括上述阻挡块,该阻挡块响应于气缸的活塞杆的平移而大致水平地平移。
20.包含在本说明书中并构成本说明书一部分的附图示出了本发明的实施例,并且与上面给出的本发明的发明内容以及下面给出的附图的详细描述一起用于解释本发明的原理。
附图说明
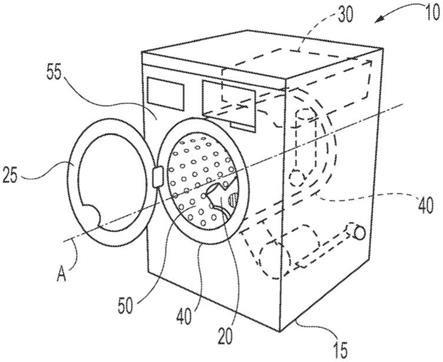
21.图1是体现本发明原理的缝纫机的前、顶、左立体图。
22.图2是类似于图1的视图,为了清楚起见,缝纫机架的部分以虚线表示。
23.图3a是图1和图2的缝纫机的前、顶、右立体图,示出了针组件、压脚、连杆组件和调节机构,其中压脚处于最低位置。
24.图3b是类似于图3a的视图,但压脚处于最高位置。
25.图4a是图1和图2的缝纫机的右侧视图,示出了针组件、压脚、走针脚、连杆组件和调节机构,其中压脚处于最低位置并且走针脚处于最高位置,调节机构设置为用于走针脚的低步进高度。
26.图4b是与图4a类似的视图,其中压脚处于最高位置并且走针脚处于最低位置,并且调节机构设置为用于走针脚的低步进高度。
27.图5a是与图4a类似的视图,其中压脚处于最低位置并且走针脚处于最高位置,并且调节机构设置为用于走针脚的高步进高度。
28.图5b是与图5a类似的视图,其中压脚处于最高位置并且走针脚处于最低位置,并且调节机构设置为用于走针脚的高步进高度。
29.图6是类似于图3a的视图,但是具有用于调节机构的致动器的替代实施例。
具体实施方式
30.首先参考图1至图5b,示出了体现本发明原理的缝纫机10。缝纫机10总体上包括机架12、曲轴14、针组件16、压脚18、走针脚20和连杆组件22。机器10还可以包括压脚偏置机构24。压脚偏置机构24可以优选地是美国专利第7,360,497号中所示和描述的类型,在此通过引用并入本文,就好像其全部内容被完全阐述一样。
31.现在参考图3a至图5b,走针脚20支撑在臂30的前端。臂30的相反后端在32处枢转地连接到用于下送料卡爪的往复驱动系统(未详细示出)。压脚18支撑在臂34的前端。臂34的相反后端枢转地连接到标准件36,如38处。连杆40在其前端在42处枢转地连接到压脚18,并且在其相反的后端,在46处枢转地连接到连杆44的下端。走针脚臂30和连杆40通过连杆50在52和54处枢转地连接。
32.曲柄臂60在其下端可枢转地连接到曲轴14,并在其上端在64处可枢转地连接到曲柄杆62的前端。曲柄杆62在其相反的后端处固定连接到驱动轴66,如通过锁定螺纹件68。连杆或杠杆70在其前端在72处枢转地连接到针组件16的上端,并在其相反的后端固定连接到驱动轴66,如通过锁定螺纹件(未示出)。
33.第二曲柄臂80在其下端在82处枢转地连接到曲柄杆62。曲柄臂80的上端携带有销84。第二曲柄杆86具有其后端,所述后端如通过锁定螺纹件90固定地连接到第二驱动轴88。
第二曲柄杆86的相反前端在其中具有细长槽92。销84行进于槽92中。
34.连杆44的上端在96处可枢转地连接到连杆或杠杆94的后端。连杆或杠杆94的相反前端如通过锁定螺纹件100固定连接到第二驱动轴。
35.连杆组件22被配置为引起压脚18和走针脚20的异相往复运动。可以参考美国专利第4,449,464号和第5,309,854号看到这种连杆组件的其他细节,特此以引用方式并入本文,就好像其全部内容被完全阐述一样。
36.继续参考图3a至图5b,为了下面将要描述的目的,提供了调节机构120用于由操作者可选择地调节连杆组件22。调节机构120具有由一对端板124、126可旋转地支撑的导螺杆122。匹配地设有螺纹的阻挡块128由导螺杆122接合。调节旋钮130的旋转使阻挡块128沿着一对导杆134、136前后平移。一旦阻挡块由旋钮130定位,端板126中的锁定螺纹件140将导螺杆122锁定就位。
37.阻挡块128包括竖直定向的通道142。销84具有端部144,该端部144的横截面与通道144的横截面匹配。前后移动阻挡块128使通道142前后平移,这导致销84的端部144前后平移。为了能够前后行进,销84的端部144必须在通道142中上下行进。(销84的端部144在由曲轴14旋转引起的连杆22的铰接期间也上下行进。)因此,导螺杆122通过旋钮130的调节使销84和第二驱动轴88的中心线或枢轴朝向彼此或远离彼此移动。正是通过旋钮130对导螺杆122的这种选择性调节提供了上走针脚20的第一和第二不同的步进高度。
38.参考图4a,导螺杆122已经通过旋钮130进行调节,以提供上走针脚20的低步进高度。在该图中,步进脚20处于其行程的上限,并且压脚18处于其行程的下限(这些元件的材料缝合位置)。参考图4b,在导螺杆处于与图4a相同的调节位置的情况下,曲轴14已经旋转,使得步进脚20处于其行程的下限,而压脚18处于其行程的上限(这些元件的进料位置)。
39.参考图5a,导螺杆122已经通过旋钮130进行调节,以提供上走针脚20的高步进高度。在该图中,步进脚20处于其行程的上限,并且压脚18处于其行程的下限(材料缝合位置元件)。参考图5b,在导螺杆处于与图5a相同的调节位置的情况下,曲轴14已经旋转,使得步进脚20处于其行程的下限,而压脚18处于其行程的上限(材料送料位置元件)。因此,图5a定位的压脚18和步进脚20可以容纳更厚的材料,例如起皱材料。
40.应当理解,由于导螺杆122和阻挡块128的性质,走针脚20的步进高度在低步进高度(图4a)和高步进高度(图5a)之间连续或无限地可变。
41.虽然导螺杆已经被示出和描述为用于前后移动阻挡块128的致动器,但是注意可以使用大多数任何类型的致动器。例如,现在参考图6,并且用相同的数字表示先前描述的相同元件,气缸150可用于前后平移阻挡块128。阻挡块128连接到气缸150的杆152。因此,杆152的前后平移使阻挡块128前后平移。在本实施例中,与前面使用导螺杆的实施例不同,由于气缸150的操作,走针脚20只有两个步进高度位置,即低步进高度和高步进高度。
42.进一步注意,也可以使用其他致动器,例如液压缸、电动机(线性或旋转)、电磁螺线管等。所有这些致动器都被视为包含在术语“致动器”中,用作“调节机构”的一部分,无论是手动操作还是由外部电源供电。
43.如本文所用,术语“连杆”或“连杆组件”应视为包括具有固定和/或枢轴连接的多个连杆的组合,以及在其相反端部处具有固定和/或枢轴连接的单个连杆或杠杆。
44.所示和描述的本发明的各种实施例仅用于说明目的,因为附图和说明书并非旨在
以任何方式限制或限定权利要求的范围。本领域技术人员将理解在不脱离本发明的精神或范围的情况下可以对本发明进行的各种改变、修改和改进。因此,本发明在其更广泛的方面不限于所示和描述的具体细节和代表性装置和方法。本发明存在于本文所述的每个单独特征中,单独存在,以及存在于任何和所有这些特征的所有组合中。因此,在不脱离总体发明构思的精神或范围的情况下,可以偏离这些细节。相应地,本发明的范围应仅由以下权利要求及其等效物限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。