1.本发明涉及视觉定位技术领域,尤其涉及一种换电设备的定位控制系统及方法。
背景技术:
2.电动汽车发展迅速,得到越来越广泛的应用。在电量不足时,用户可以将电动汽车驶入换电站更换电池包。为了保证运行过程的安全,电池包都被牢固锁止在电动汽车的电池托架上;因此,在换电过程中,首先要将亏电的电池包拆卸下来才能够安装满电的电池包。而拆卸电池包的关键就是要换电设备与电池托架实现精确定位,才能够将电池包解锁并取出。然而,在现有的换电的过程中,往往难以快速准确地实现换电设备与电池托架的准确定位,导致换电效率低下。
技术实现要素:
3.本发明要解决的技术问题是为了克服现有技术中换电准确率低及换电效率低的缺陷,提供一种换电设备的定位控制系统及方法。
4.本发明是通过下述技术方案来解决上述技术问题:
5.一种换电设备的定位控制系统,包括:
6.至少两个图像采集模块,分别设置于所述换电设备朝向换电位置一侧的不同位置上,至少两个图像采集模块用于对换电车辆的不同位置进行图像采集以至少获取第一图像和第二图像;
7.图像处理模块,与所述至少两个图像采集模块相连接,至少用于对所述第一图像、所述第二图像进行图像处理以获取位置调整量;以及,
8.调整控制模块,用于根据所述位置调整量控制调整所述换电设备的位置以使所述换电设备与所述换电车辆完成定位。
9.在本方案中,所述定位控制系统能够自动且准确地获取换电车辆的准确位置,以使得换电设备能够精确地与换电车辆的电池托架定位以进行电池包的拆装,从而极大地提升了换电准确率和换电效率。
10.可选地,所述位置调整量包括水平位移量、垂直位移量和角度旋转量;
11.所述图像处理模块至少对所述第一图像、所述第二图像中的任意一个进行图像处理以获取所述水平位移量,
12.所述图像处理模块至少对所述第一图像和所述第二图像进行图像处理以获取所述垂直位移量,
13.所述图像处理模块至少对所述第一图像和所述第二图像中的任意两个进行图像处理以获取所述角度旋转量。
14.在本方案中,所述定位控制系统可以通过水平位移量、垂直位移量和角度旋转量中的至少一个来实现多个方向上的定位控制,从多维度进行位置调整来保证定位精度需求。
15.可选地,至少两个图像采集模块包括第一图像采集模块及第二图像采集模块;
16.所述图像处理模块根据所述第一图像和第一参考图像获取所述水平位移量,所述第一参考图像为所述换电设备位于换电位置时所述第一图像采集模块采集的参考图像;或,
17.所述图像处理模块根据所述第二图像和第二参考图像获取所述水平位移量,所述第二参考图像为所述换电设备位于换电位置时所述第二图像采集模块采集的参考图像。
18.在本方案中,所述定位控制系统可以通过与参考图像的比较获取水平位移量,不仅可以实现水平方向上的定位控制,还可以进一步提升水平方向上的定位精度。
19.可选地,至少两个图像采集模块包括第一图像采集模块及第二图像采集模块;
20.所述图像处理模块根据所述第一图像和第一参考图像获取第一垂直位移量,所述第一参考图像为所述换电设备位于换电位置时所述第一图像采集模块采集的参考图像;
21.所述图像处理模块根据所述第二图像和第二参考图像获取第二垂直位移量,所述第二参考图像为所述换电设备位于换电位置时所述第二图像采集模块采集的参考图像。
22.在本方案中,所述定位控制系统可以通过与参考图像的比较获取垂直位移量,不仅可以实现垂直方向上的定位控制,还可以进一步提升垂直方向上的定位精度。
23.可选地,至少两个图像采集模块包括第一图像采集模块及第二图像采集模块,所述第一图像采集模块用于对换电车辆的第一位置进行图像采集以获取所述第一图像,所述第二图像采集模块用于对换电车辆的第二位置进行图像采集以获取所述第二图像;
24.所述图像处理模块根据第一景深值和第二景深值获取所述旋转角度量,所述第一景深值为所述第一图像中所述第一位置的景深值,所述第二景深值为所述第二图像中所述第二位置的景深值。
25.在本方案中,所述定位控制系统可以通过采集到的至少两个景深值获取旋转角度量,以使得换电设备与换电车辆保持相平行,同时还保证了旋转角度的控制精度。
26.可选地,每个所述图像采集模块一一对应一个采集位置,相邻的两个图像采集模块所对应的采集位置之间具有预设间距。
27.在本方案中,可通过相互具有预设间距的多个图像采集模块采集换电车辆不同位置处的图像,以提升定位控制精度。
28.可选地,所述定位控制系统还包括至少两个距离传感器;
29.至少两个距离传感器分别用于采集换电设备与换电车辆之间的距离并至少获取第一距离和第二距离;
30.所述位置调整量包括旋转角度量,所述图像处理模块还用于至少根据所述第一距离和所述第二距离获取所述旋转角度量。
31.在本方案中,所述定位控制系统可以通过采集与换电车辆之间的至少两个距离获取旋转角度量,以使得换电设备与换电车辆保持相平行,同时还保证了旋转角度的控制精度。
32.可选地,所述换电设备包括解锁机构和位置调整机构;
33.所述解锁机构用于对锁止在所述换电车辆的电池托架上的电池包进行解锁;
34.所述调整控制模块用于根据所述位置调整量控制所述位置调整机构调整所述解锁机构的位置直至所述解锁机构与所述电池托架上的解锁件完成定位。
35.在本方案中,通过位置调整机构根据水平位移量、垂直位移量和旋转角度量中的至少一个来调整解锁机构在水平方向、垂直方向或者角度方向的位置来完成解锁机构的定位,从而使解锁机构与电池托架上的解锁件精确对准。
36.可选地,所述位置调整机构包括控制单元、水平移动单元、垂直移动单元及旋转单元;
37.所述控制单元与所述定位控制系统通信连接,根据所述水平位移量、所述垂直位移量和所述旋转角度量中的至少一个对应控制所述水平移动单元、所述垂直移动单元或所述旋转单元移动至调整位置。
38.在本方案中,所述换电设备可以通过水平位移量、垂直位移量和角度旋转量中的至少一个来实现多个方向上的定位控制,以保证多维度定位控制需求。
39.可选地,所述水平移动单元包括轨道、导轮和水平驱动器;
40.所述水平驱动器用于根据所述水平位移量驱动所述导轮沿所述轨道移动。
41.在本方案中,通过水平驱动器可以根据水平位移量自动驱动解锁结构在水平方向的移动,通过轨道和导轨的配合可以提高解锁机构在水平方向运动的效率及稳定性。
42.可选地,所述垂直位移量包括第一垂直位移量和第二垂直位移量;
43.所述垂直移动单元包括第一垂直驱动器、第二垂直驱动器、第一升降机构、第二升降机构和换电执行机构,所述第一垂直驱动器连接于所述第一升降机构,所述第二垂直驱动器连接于所述第二升降机构,所述第一升降机构、所述第二升降机构分别连接于所述换电执行机构的两端以带动所述换电执行机构的两端升降移动;
44.所述第一垂直驱动器用于根据所述第一垂直位移量驱动所述第一升降机构,所述第二垂直驱动器用于根据所述第二垂直位移量驱动所述第二升降机构。
45.在本方案中,通过第一垂直驱动器及第二垂直驱动器可以分别根据第一垂直位移量和第二垂直位移量自动驱动第一升降机构及第二升降机构升降,以带动换电执行机构的两端进行升降,从而进一步带动与之连接的解锁机构两端的升降以调整解锁机构在竖直方向上的位置,进一步提高了解锁机构在竖直方向位置调整时的稳定性。
46.可选地,所述旋转单元包括转盘和旋转驱动器;
47.所述转盘套在所述换电执行机构的底部,所述旋转驱动器连接于所述转盘并用于根据所述旋转角度量驱动所述转盘带动所述换电执行机构旋转。
48.在本方案中,通过旋转驱动器可以根据旋转角度量自动驱动转盘旋转以带动换电执行机构旋转,从而进一步带动与之连接的解锁机构旋转以调整解锁机构在角度上的位置,进一步提高了解锁机构在调整角度时稳定性。
49.一种换电设备的定位控制方法,包括以下步骤:
50.对换电车辆的第一位置和第二位置进行图像采集以获取第一图像和第二图像;
51.对所述第一图像、所述第二图像进行图像处理以获取位置调整量;以及,
52.根据所述位置调整量控制调整所述换电设备的位置以使所述换电设备与所述换电车辆完成定位。
53.在本方案中,所述定位控制方法能够自动且准确地获取换电车辆的准确位置,以使得换电设备能够精确地与换电车辆的电池托架定位以进行电池包的拆装,从而极大地提升了换电准确率和换电效率。
54.可选地,所述对所述第一图像、所述第二图像进行图像处理以获取位置调整量的步骤包括:
55.根据所述第一图像和所述第一位置对应的第一参考图像或所述第二图像和所述第二位置对应的第二参考图像获取水平位移量;或,
56.根据所述第一图像和所述第一位置对应的第一参考图像以及所述第二图像和所述第二位置对应的第二参考图像分别获取第一垂直位移量和第二垂直位移量;或,
57.根据所述第一位置在所述第一图像中的景深值和所述第二位置在所述第二图像中的景深值获取旋转角度量。
58.在本方案中,所述定位控制方法可以通过与参考图像的比较获取水平位移量,不仅可以实现水平方向上的定位控制,还可以进一步提升水平方向上的定位控制精度。
59.在本方案中,所述定位控制方法可以通过与参考图像的比较获取垂直位移量,不仅可以实现垂直方向上的定位控制,还可以进一步提升垂直方向上的定位控制精度。
60.在本方案中,所述定位控制方法可以通过采集到的至少两个景深值获取旋转角度量,以使得换电设备与换电车辆保持向平行,同时还保证了旋转角度的控制精度。
61.可选地,所述定位控制方法还包括:
62.采集换电设备与换电车辆之间的第一距离和第二距离;
63.根据所述第一距离和所述第二距离获取旋转角度量。
64.在本方案中,所述定位控制方法可以通过采集与换电车辆之间的至少两个距离获取旋转角度量,以使得换电设备与换电车辆保持相平行,同时还保证了旋转角度的控制精度。
65.在符合本领域常识的基础上,所述各优选条件,可任意组合,即得本发明各较佳实施例。
66.本发明的积极进步效果在于:
67.本发明提供的换电设备的定位控制系统及方法,能够自动且准确地获取换电车辆及其电池托架的准确位置,以使得换电设备能够精确地与换电车辆的电池托架定位以进行电池包的拆装,从而极大地提升了换电准确率和换电效率。
附图说明
68.在结合以下附图阅读本公开的实施例的详细描述之后,能够更好地理解本发明的所述特征和优点。在附图中,各组件不一定是按比例绘制,并且具有类似的相关特性或特征的组件可能具有相同或相近的附图标记。
69.图1为本发明的实施例2的换电设备的定位控制系统的结构示意图。
70.图2为本发明的实施例2的定位控制系统的获取目标装置的位置信息的示意图。
71.图3为本发明的实施例2的定位控制系统的第一参考图像的示意图。
72.图4为本发明的实施例2的定位控制系统的第一图像的示意图。
73.图5为本发明的实施例2的定位控制系统的获取第一景深和第二景深的示意图。
74.图6为本发明的实施例3的换电设备的定位控制系统的结构示意图。
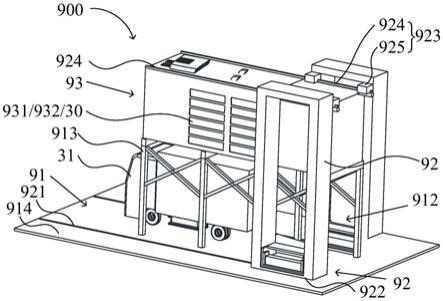
75.图7为本发明的实施例2的换电设备的立体图。
76.图8为本发明的实施例2的换电设备的局部的主视图。
77.图9为本发明的实施例2的换电设备的旋转单元的示意图。
78.图10为本发明的实施例5的换电设备的定位控制方法的流程示意图。
79.图11为本发明的实施例6的换电设备的定位控制方法的流程示意图。
80.图12为本发明的实施例6的换电设备的定位控制方法的步骤s91的流程示意图。
具体实施方式
81.下面通过实施例的方式进一步说明本发明,但并不因此将本发明限制在所述的实施例范围之中。
82.实施例1
83.为了克服目前存在的上述缺陷,本实施例提供一种换电设备的定位控制系统包括:至少两个图像采集模块,分别设置于所述换电设备朝向换电位置一侧的不同位置上,至少两个图像采集模块用于对换电车辆的不同位置进行图像采集以至少获取第一图像和第二图像;图像处理模块,与所述至少两个图像采集模块相连接,至少用于对所述第一图像、所述第二图像进行图像处理以获取位置调整量;以及,调整控制模块,用于根据所述位置调整量控制调整所述换电设备的位置以使所述换电设备与所述换电车辆完成定位。
84.在本实施例中,并不具体限定图像采集模块的数量及设置位置,均可根据实际需求进行相应的调整及选择。
85.在本实施例中,所述定位控制系统能够自动且准确地获取换电车辆的准确位置,以使得换电设备能够精确地与换电车辆的电池托架定位以进行电池包的拆装,从而极大地提升了换电准确率和换电效率。
86.实施例2
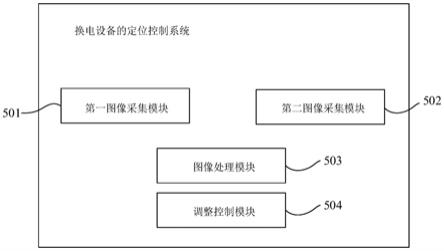
87.如图1所示,本实施例提供一种换电设备的定位控制系统,所述定位控制系统主要包括第一图像采集模块501、第二图像采集模块502、图像处理模块503及调整控制模块504。
88.在本实施例中,图像采集模块可以采用视觉传感器,但并不具体限定其类型,可根据实际需求进行相应的选择及调整。
89.第一图像采集模块501用于对换电车辆的第一位置进行图像采集以获取第一图像,第二图像采集模块502用于对换电车辆的第二位置进行图像采集以获取第二图像。
90.具体地,参考图2所示,第一图像采集模块501沿箭头所示方向获取目标装置7(即换电车辆或其相关部件)的第一图像,所述第一图像中包括目标装置7上的第一位置a;第二图像采集模块502沿箭头所示方向获取目标装置7的第二图像,所述第二图像中包括目标装置上的第二位置b。图像处理模块503接收第一图像和第二图像后,进行图像处理,从而得到目标装置7的位置信息。
91.在本实施例中,图像处理模块503还根据目标装置的位置信息和目标装置的参考位置信息的得到位置调整量。
92.作为一种可选的实施方式,图像处理模块503根据第一图像采集模块501、第二图像采集模块502实时获取的图像以及预先设置的目标装置的参考图像,进行图像处理,以得到位置调整量。
93.在一种可选的实施方式中,图像处理模块503根据第一图像和第一参考图像获取水平位移量。所述参考图像为所述换电设备位于换电位置时图像采集模块采集的参考图
像。
94.具体地,图3给出了第一参考图像g1的一种示意。第一参考图像g1预存在图像处理模块503中。第一参考图像g1包括目标装置上的第一位置a。通过分析第一参考图像g1,图像处理模块得到目标装置上的第一位置a在第一参考图像g1中对应的像素在第一参考图像g1中的位置,作为定位的参考,为了便于说明,称为“目标位置”。图像处理模块得到目标位置的过程可以采用本领域已经公开的算法实现,是本领域技术人员能够实现的,此处不再赘述。
95.图4给出了第一图像g11的一种示意。第一图像g11中包括目标装置上的第一位置a。通过分析第一图像g11,图像处理模块得到目标装置上的第一位置a在第一图像g11中对应的像素在第一图像g11中的位置,为了便于说明,称为“实时位置”。图像处理模块得到目标位置的过程可以采用本领域已经公开的算法实现,是本领域技术人员能够实现的,此处不再赘述。
96.在一种可选的实施方式中,位置获取单元根据第一图像和第一参考图像获取水平位移量。根据图像处理算法,图像处理模块根据目标位置和实时位置得到第一水平位移量和第一垂直位移量。通过将第一图像采集模块移动第一水平位移量和第一垂直位移量,可以使得第一图像采集模块拍摄到与第一参考图像g1一致的图像。图像处理模块得到第一水平位移量和第一垂直位移量的过程可以采用本领域已经公开的算法实现,是本领域技术人员能够实现的,此处不再赘述。调整控制模块以第一水平位移量作为水平位移量,通过移动相应的水平位移量,可以实现对应的水平位移,以达到在水平方向上与目标装置相匹配;类似地,通过移动相应的直位位移量,可以实现对应的直位位移,以达到在直位方向上与目标装置相匹配。
97.在另一种可选的实施方式中,图像处理模块根据第二图像和第二参考图像获取水平位移量。图像处理模块根据第二图像和预存的第二参考图像获取第二水平位移量和第二垂直位移量。通过将第二图像采集模块移动第二水平位移量和第二垂直位移量,可以使得第二图像采集模块拍摄到与第二参考图像一致的图像。调整控制模块以第二水平位移量作为水平位移量,通过移动相应的水平位移量,可以实现对应的水平位移,以达到在水平方向上与目标装置相匹配;类似地,通过移动相应的直位位移量,可以实现对应的直位位移,以达到在直位方向上与目标装置相匹配。
98.在另一种可选的实施方式中,目标装置的参考位置信息预先存储在图像处理模块中。图像处理模块根据预存的目标装置的参考位置信息和实时获取到目标装置的位置信息得到位置调整量。根据位置调整量调整第一图像采集模块、第二图像采集模块,可以使得第一图像采集模块拍摄到与第一参考图像一致的图像,使得第二图像采集模块拍摄到与第二参考图像一致的图像。
99.作为一种可选的实施方式,参考图5所示,当第一图像采集模块和第二图像采集模块设置于位置调整机构8上时,第一图像采集模块设置在与第一位置a对应的位置,第二图像采集模块设置在第二位置b对应的位置,第一位置a和第二位置b之间具有第一预设间距d3,第一图像采集模块和第二图像采集模块之间具有第二预设距离l。
100.图像处理模块对第一图像进行图像处理,得到第一景深,第一景深值为第一图像中第一位置a的景深值d1;图像处理模块对第二图像进行图像处理,得到第二景深,第二景
深值为第二图像中第二位置b的景深值d2。图像处理模块获得景深值的具体方式可以采用本领域公开的算法实现,是本领域技术人员能够实现的,此处不再赘述。
101.图像处理模块得到两个景深值的差值d=|d2-d1|。图像处理模块根据景深值的差值d、第一图像采集模块和第二图像采集模块之间的距离l以及第一位置a与第二位置b之间的距离d3,依据三角函数原理,可以得到旋转角度量θ。调整控制模块504用于控制位置调整机构8按照旋转角度量θ向相应方向旋转,可以使得目标装置7与位置调整机构8向平行。
102.本实施例还提供一种换电设备,用于为电动汽车更换电池包,所述换电设备包括如上述的定位控制系统。如图7所示,所述换电设备还包括解锁机构802和位置调整机构。解锁机构用于对锁止在电池托架上的电池包进行解锁,调整控制模块用于图像处理模块获取的水平位移量、垂直位移量和旋转角度量中的至少一个控制位置调整机构调整解锁机构的位置直至解锁机构与电池托架上的解锁件完成定位。
103.作为一种可选的实施方式,第一图像采集模块和第二图像采集模块设置于解锁机构上。根据图像处理模块获取的位置调整量对解锁机构的位置进行调整解锁,即可使解锁机构与电池托架上的解锁件完成定位。
104.本实施例的换电设备设置于换电站,当电动汽车进入换电站停放至预设的停车位后,本实施例的换电设备在位置调整机构的控制下向电动汽车移动,并根据定位控制系统获取的水平位移量、垂直位移量和旋转角度量中的至少一个调整解锁机构802的位置直至解锁机构802与电池托架上的解锁件完成定位。
105.作为一种可选的实施方式,第一图像采集模块501和第二图像采集模块502设置于解锁机构802上。根据所述定位控制系统获取的位置调整量对解锁机构802的位置进行调整解锁,即可使解锁机构802与电池托架上的解锁件完成定位。第一图像采集模块501和第二图像采集模块502设置于解锁机构802上,则所述定位控制系统获取的电池托架位置信息,直观体现了解锁机构与电池托架之间的位置关系,有助于提高定位精度,便于进行换电操作。
106.具体地,位置调整机构包括控制单元、水平移动单元、垂直移动单元以及旋转单元,控制单元与定位控制系统通信连接,从而根据水平位移量、垂直位移量和旋转角度量中的至少一个对应控制水平移动单元、垂直移动单元或旋转单元移动至调整位置。
107.在一种可选的实施方式中,本实施例的换电设备的初始位置与换电站内的停车位相匹配。当电动汽车停放在停车位上准备换电时,该电动汽车的停车状态往往难以与准确的换电位置相一致,而是存在偏差。此时,该换电设备即可根据电动汽车的停车状态对换电设备进行定位并调整换电设备的位置与电动汽车实现精确对准,实现了快速高效的定位,无需调整电动汽车的停车位置,提高换电效率。
108.为了实现水平移动,水平移动单元包括轨道、导轮和水平驱动器,水平驱动器用于根据水平位移量驱动导轮沿轨道移动。作为一种可选的实施方式,参考图7、图8所示,轨道包括天轨701和地轨702,导轮包括天轨导轮703和地轨导轮704。天轨导轮703与天轨701对应设置,地轨导轮704与地轨702对应设置。水平驱动器分别驱动天轨导轮703沿天轨701在x轴方向(即水平方向)上移动,驱动地轨导轮704沿地轨702移动,从而实现解锁机构的水平移动。图7中,x轴、y轴、z轴两两垂直。图8中示出了换电执行机构803的框架,未示出具体结构,换电执行机构的具体结构是本领域技术人员能够实现的,此处不再赘述。
109.当电动汽车停放在停车位上准备换电时,如果电动汽车的停车状态与准确的换电位置在水平方向上存在偏差,则根据水平位移量移动解锁机构,可以使得解锁机构在水平方向上与电动汽车的电池托架的位置相匹配,具有较高的精度,为准确解锁提供了保障。
110.在本实施例中,通过水平驱动器可以根据水平位移量自动驱动解锁结构在水平方向的移动,通过轨道和导轨的配合可以提高解锁机构在水平方向运动的效率及稳定性。
111.图像处理模块获取的垂直位移量包括第一垂直位移量和第二垂直位移量,其中,第一垂直位移量根据第一图像获得,第二垂直位移量根据第二图像获得。
112.作为一种具体的实施方式,垂直移动单元包括第一垂直驱动器61、第二垂直驱动器62、第一升降机构、第二升降机构和换电执行机构803,第一垂直驱动器连接于第一升降机构,第二垂直驱动器连接于第二升降机构,第一升降机构、第二升降机构分别连接于换电执行机构的两端以带动换电执行机构的两端升降移动;第一垂直驱动器用于根据第一垂直位移量驱动第一升降机构,第二垂直驱动器用于根据第二垂直位移量驱动第二升降机构。
113.具体地,第一升降机构包括第一链条706和对应设置的第一链轮611,第一链条706在第一垂直驱动器61的驱动下带动第一链轮611沿垂直方向(即z轴方向)移动,以带动换电执行机构803沿垂直方向移动。第二升降机构包括第二链条621和对应设置的第二链轮622,第二链条621在第二垂直驱动器62的驱动下带动第二链轮622沿垂直方向移动,以带动换电执行机构803沿垂直方向移动。
114.当电动汽车停放在停车位上准备换电时,如果电动汽车的停车状态与准确的换电位置在垂直方向上存在偏差,则根据垂直位移量移动解锁机构,可以使得解锁机构在垂直方向上与电动汽车的电池托架的位置相匹配,具有较高的精度,为准确解锁提供了保障。
115.在本实施例中,通过第一垂直驱动器及第二垂直驱动器可以分别根据第一垂直位移量和第二垂直位移量自动驱动第一升降机构及第二升降机构升降,以带动换电执行机构的两端进行升降,从而进一步带动与之连接的解锁机构两端的升降以调整解锁机构在竖直方向上的位置,进一步提高了解锁机构在竖直方向位置调整时的稳定性。
116.在一种可选的实施方式中,参考图9所示,旋转单元包括转盘811和旋转驱动器812,转盘811套在换电执行机构803的底部,旋转驱动器812连接于转盘811并用于根据旋转角度量驱动转盘811带动换电执行机构803旋转。
117.当电动汽车停放在停车位上准备换电时,如果电动汽车的停车状态与准确的换电位置存在角度上的偏差,则解锁装置等伸出后将难以对准解锁目标,或者换电执行机构伸出后难以对准电池托架。本实施例的换电设备能够通过所述定位控制系统获取电动汽车的停车状态与准确的换电位置角度偏差,例如,图5所示的角度θ,并以该角度θ作为旋转角度量调整换电设备的姿态,从而使得换电设备的姿态与电动汽车的停车状态相匹配,以便解锁机构与电池托架上的解锁件相对准,从而实现高效准确的换电操作。
118.在本实施例中,通过旋转驱动器可以根据旋转角度量自动驱动转盘旋转以带动换电执行机构旋转,从而进一步带动与之连接的解锁机构旋转以调整解锁机构在角度上的位置,进一步提高了解锁机构在调整角度时稳定性。
119.本实施例提供的换电设备及其定位控制系统,能够自动且准确地获取换电车辆及其电池托架的准确位置,以使得换电设备能够精确地对换电车辆的电池包进行相应的操作,从而极大地提升了换电准确率,进而极大地提升了换电效率。
120.实施例3
121.在实施例2的基础上,所述定位控制系统还包括至少两个距离传感器,如图6所示,至少两个距离传感器包括第一距离传感器505及第二距离传感器506。
122.在本实施例中,并不具体限定距离传感器的数量及设置位置,均可根据实际需求进行相应的调整及选择。
123.作为一种可选的实施方式,参考图5所示,与实施例2的旋转角度量θ的方式类似,当第一图像采集模块和第二图像采集模块设置于位置调整机构8上时,第一距离传感器505(假设与第一图像采集模块的位置重叠)设置在与第一位置a对应的位置,第二距离传感器506(假设与第一图像采集模块的位置重叠)设置在第二位置b对应的位置,第一位置a和第二位置b之间具有第一预设间距d3,第一距离传感器和第二距离传感器之间具有第二预设距离l。
124.第一距离传感器用于检测与目标装置之间的距离值d1;第二距离传感器用于检测与目标装置之间的距离值d2。距离传感器检测距离的方式可以采用本领域公开的算法实现,是本领域技术人员能够实现的,此处不再赘述。
125.图像处理模块得到两个距离值的差值d=|d2-d1|。图像处理模块根据差值d、第一距离传感器和第二距离传感器之间的距离l以及第一位置a与第二位置b之间的距离d3,依据三角函数原理,可以得到旋转角度量θ。调整控制模块504用于控制位置调整机构8按照旋转角度量θ向相应方向旋转,可以使得目标装置7与位置调整机构8向平行。
126.实施例4
127.为了克服目前存在的上述缺陷,本实施例提供一种换电设备的定位控制方法,所述定位控制方法包括以下步骤:对换电车辆的第一位置和第二位置进行图像采集以获取第一图像和第二图像;对所述第一图像、所述第二图像进行图像处理以获取位置调整量;以及,根据所述位置调整量控制调整所述换电设备的位置以使所述换电设备与所述换电车辆完成定位。
128.在本实施例中,所述定位控制方法能够自动且准确地获取换电车辆的准确位置,以使得换电设备能够精确地与换电车辆的电池托架定位以进行电池包的拆装,从而极大地提升了换电准确率和换电效率。
129.实施例5
130.本实施例提供一种换电设备的定位控制方法。参考图10所示,所述定位控制方法包括以下步骤:
131.步骤s91、获取电池托架的位置信息。
132.步骤s92、根据位置信息与对应的参考位置信息获取位置调整量。
133.步骤s93、根据位置调整量调整解锁机构的位置至解锁机构与电池托架上的解锁件相对准。
134.在一种可选的实施方式中,所述定位控制方法采用实施例3的换电设备实现。其中,定位控制系统获取电池托架的位置信息,并根据位置信息与对应的参考位置信息获取位置调整量。然后,位置调整机构根据位置调整量调整解锁机构802的位置至解锁机构802与电池托架上的解锁件相对准,以实现解锁和换电。
135.实施例6
136.在实施例5的基础上,本实施例提供一种换电设备的定位控制方法。作为一种可选的实施方式,所述定位控制方法采用实施例3的换电设备实现。
137.参考图11所示,在步骤s91之前,所述定位控制方法还包括以下步骤:
138.步骤s90、根据预设值控制解锁机构移动至粗定位位置。
139.通过水平移动单元、垂直移动单元的驱动,可以控制解锁机构移动至预设的粗定位位置。具体地,所述换电设备设置于换电站。当车辆进入换电站进行换电时,会停放至相应的停车位。该预设的粗定位位置与相应的停车位相对应。解锁机构802移动至预设的粗定位位置,则解锁机构802与车辆的电池托架的位置关系已经达到了预估的范围。接下来,根据定位控制系统对电池托架的定位,即可使得解锁机构802与电池托架上的解锁件完成准确定位。
140.在一种可选的实施方式中,参考图12所示,步骤s91包括:
141.步骤s911、获取电池托架的第一位置的第一图像。
142.步骤s912、获取电池托架的第二位置的第二图像。
143.步骤s913、根据第一图像和第二图像得到电池托架的位置信息。
144.在换电过程中,电池托架作为定位控制系统定位的目标装置,电池托架上预设有第一位置a和第二位置b。参考图2所示,第一图像采集模块501沿箭头所示方向获取目标装置第一图像,第一图像中包括目标装置上的第一位置a;第二图像采集模块502沿箭头所示方向获取目标装置第二图像,第二图像中包括目标装置上的第二位置b。图像处理模块503接收第一图像和第二图像后,进行图像处理,从而得到目标装置的位置信息。
145.当电动汽车停放在停车位上准备换电时,该电动汽车的停车状态往往难以与准确的换电位置相一致,而是存在偏差。此时,根据本实施例的定位控制方法即可根据电动汽车的停车状态对换电设备进行定位并调整换电设备的位置与电动汽车实现精确对准,实现了快速高效的定位,无需调整电动汽车的停车位置,提高换电效率。
146.具体地,步骤s92包括:
147.根据第一图像和第一位置对应的第一参考图像或第二图像和第二位置对应的第二参考图像获取水平位移量;或
148.根据第一图像和第一参考图像以及第二图像和第二参考图像分别得到第一垂直位移量和第二垂直位移量;或
149.根据第一位置在第一图像中的景深值和第二位置在第二图像中的景深值获取旋转角度量。
150.作为另一种可选的实施方式,步骤s92还包括:
151.根据第一距离传感器505采集的第一距离和第二距离传感器506采集的第二距离获取旋转角度量。
152.作为一种可选的实施方式,在步骤s92中,通过分析第一参考图像g1,图像处理模块得到目标装置上的第一位置a在第一参考图像g1中对应的像素在第一参考图像g1中的位置,作为定位的参考,为了便于说明,称为“目标位置”。
153.通过分析第一图像g11,图像处理模块得到目标装置上的第一位置a在第一图像g11中对应的像素在第一图像g11中的位置,为了便于说明,称为“实时位置”。
154.根据图像处理算法,图像处理模块根据目标位置和实时位置得到第一水平位移量
和第一垂直位移量。通过将第一图像采集模块移动第一水平位移量和第一垂直位移量,可以使得第一图像采集模块拍摄到与第一参考图像g1一致的图像。
155.类似地,图像处理模块根据第二图像和预存的第二参考图像获取第二水平位移量和第二垂直位移量。通过将第二图像采集模块移动第二水平位移量和第二垂直位移量,可以使得第二图像采集模块拍摄到与第二参考图像一致的图像。
156.参考图7、图8所示,水平驱动器分别驱动天轨导轮703沿天轨701在x轴方向(即水平方向)上移动,驱动地轨导轮704沿地轨702移动,从而实现解锁机构802的水平移动。
157.当电动汽车停放在停车位上准备换电时,如果电动汽车的停车状态与准确的换电位置在水平方向上存在偏差,则根据水平位移量移动解锁机构,可以使得解锁机构在水平方向上与电动汽车的电池托架的位置相匹配,具有较高的精度,为准确解锁提供了保障。
158.参考图7、图8所示,第一链条706在第一垂直驱动器61的驱动下带动第一链轮611沿垂直方向(即z轴方向)移动,第二链条621在第二垂直驱动器62的驱动下带动第二链轮622沿垂直方向移动,以带动换电执行机构803沿垂直方向移动。
159.当电动汽车停放在停车位上准备换电时,如果电动汽车的停车状态与准确的换电位置在垂直方向上存在偏差,则根据垂直位移量移动解锁机构,可以使得解锁机构在垂直方向上与电动汽车的电池托架的位置相匹配,具有较高的精度,为准确解锁提供了保障。
160.图像处理模块根据第一位置在第一图像中的景深值和第二位置在第二图像中的景深值获取旋转角度量。参考图9所示,旋转驱动器812根据旋转角度量驱动转盘811带动换电执行机构803旋转。
161.当电动汽车停放在停车位上准备换电时,如果电动汽车的停车状态与准确的换电位置存在角度上的偏差,则解锁装置等伸出后将难以对准解锁目标,或者换电执行机构伸出后难以对准电池托架。根据本实施例的定位控制方法,可以获取电动汽车的停车状态与准确的换电位置角度偏差,例如,图5所示的角度θ,并以该角度θ作为旋转角度量调整换电设备的姿态,从而使得换电设备的姿态与电动汽车的停车状态相匹配,以便解锁机构与电池托架上的解锁件相对准,从而实现高效准确的换电操作。
162.在根据位置调整量调整解锁机构的位置至解锁机构与电池托架上的解锁件相对准的步骤之后,在步骤94中,伸出解锁机构802直至与解锁件配合到位并进行解锁,进而执行换电操作。
163.本实施例提供的换电设备的定位控制方法,能够自动且准确地获取换电车辆及其电池托架的准确位置,以使得换电设备能够精确地与换电车辆的电池托架定位以进行电池包的拆装,从而极大地提升了换电准确率和换电效率。
164.虽然以上描述了本发明的具体实施方式,但是本领域的技术人员应当理解,这仅是举例说明,本发明的保护范围是由所附权利要求书限定的。本领域的技术人员在不背离本发明的原理和实质的前提下,可以对这些实施方式做出多种变更或修改,但这些变更和修改均落入本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。