1.本实用新型属于激光焊接机械技术领域,具体涉及的是一种机器人送丝激光焊接机。
背景技术:
2.送丝机构是焊接设备中用以输送焊丝的专用装置,针对目前的送丝机构与焊接头都是同时固定安装在同一运动轴上,使得送丝位置与焊接光斑中心点位置为固定的相对位置,无法分离开来,因此对于不同的焊接点无法满足不同送丝位置的需求,为焊接技术人员带来极大的不便。
技术实现要素:
3.针对以上技术存在的不足,本实用新型提供了一种智能操作的机器人送丝激光焊接机。
4.为实现以上目的,本实用新型通过以下技术方案予以实现:机器人送丝激光焊接机,其特征在于:是由六轴机器人和焊接机构组成;所述的六轴机器人和焊接机构共同固定安装在面板上。
5.所述六轴机器人的前端设置有送丝机构安装架;该六轴机器人带动送丝机构安装架作x轴、y轴及z轴方向的位移工作。
6.所述的焊接机构是由有z轴支架、x轴支架及y轴支架组成,所述的z轴支架内设置有z轴运行轨道,x轴支架内设置有x轴运行轨道,y轴支架内设置有y轴运行轨道;所述的z轴支架安装在y轴支架上,而y轴支架安装在x轴支架上;所述的z轴支架上还安装有焊接头安装支架,并且该焊接头安装支架与z轴支架相互垂直设置而成。
7.焊接头安装支架带动焊接头在z轴支架上依靠z轴运行轨道进行z轴方向的运动;z轴支架连同焊接头安装支架在y轴支架上依靠y轴运行轨道进行y轴方向的运动;z轴支架、焊接头安装支架及y轴支架在x轴支架上依靠x轴运行轨道进行x轴方向的运动。
8.所述焊接头安装支架的前侧部位安装焊接头。
9.本实用新型的有益效果是:与现有技术相比,本实用新型将送丝机构安装在六轴机器人上后,六轴机器人本身可带动送丝机构作x、y、z轴方向上的位移运动,因此送丝机构运动较为灵活,通过机器人送丝动作至焊接机构内进行焊接工作,进一步通过焊接机构的x、y、z三轴来精准定位,使送丝机构位置与焊接光斑中心点位置可相互分离,以达到工件的不同焊接点位需要不同送丝位置的需求。
附图说明
10.此处所说明的附图用来提供对本实用新型的进一步理解,构成本申请的一部分:
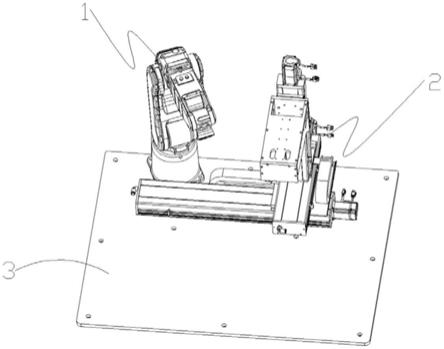
11.图1为本实用新型结构示意图。
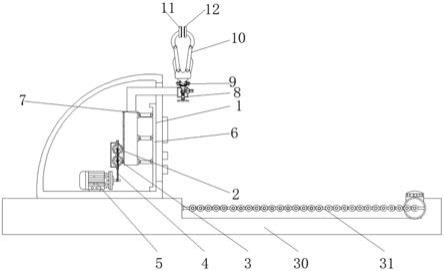
12.图2为本实用新型中的六轴机器人安装示意图。
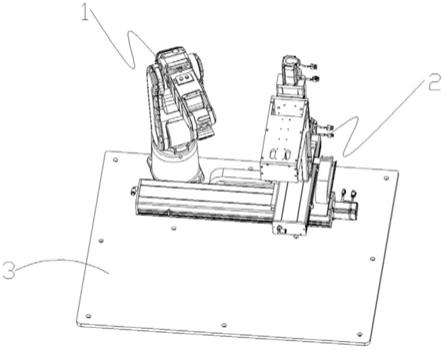
13.图3为本实用新型中的焊接机构安装示意图。
14.图中:1、六轴机器人;2、焊接机构;3、面板。
15.101、送丝机构安装架;201、x轴支架;202、y轴支架;203、z轴支架;204、焊接头安装支架;205、前侧部位。
具体实施方式
16.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
17.请参阅图1
‑
3,机器人送丝激光焊接机,是由六轴机器人1和焊接机构2组成;所述的六轴机器人1和焊接机构2共同固定安装在面板3上。
18.所述六轴机器人1的前端设置有送丝机构安装架101;送丝机构安装架101上另外安装送丝机构向焊接机构2内送丝动作;该六轴机器人1带动送丝机构安装架101作自身的x轴、y轴及z轴方向的位移工作,因此在六轴机器人1作送丝动作的过程中不受焊接机构2运动的影响。
19.如图3所示,所述的焊接机构2是由z轴支架203、x轴支架201及y轴支架202组成,所述的z轴支架203内设置有z轴运行轨道;x轴支架201内设置有x轴运行轨道,y轴支架202内设置有y轴运行轨道;所述的z轴支架203安装在y轴支架202上,而y轴支架202安装在x轴支架201上,因此z轴支架203与y轴支架202作为一整体在x轴支架202上进行位移运动;所述的z轴支架203上还安装有焊接头安装支架204,并且该焊接头安装支架204与z轴支架203相互垂直设置而成,因此焊接头安装支架204在z轴支架203进行z轴方向的位移运动。
20.焊接头安装支架204带动焊接头在z轴支架203上依靠z轴运行轨道进行z轴方向的运动;z轴支架203连同焊接头安装支架204在y轴支架202上依靠y轴运行轨道进行y轴方向的运动;z轴支架203、焊接头安装支架204及y轴支架202在x轴支架201上依靠x轴运行轨道进行x轴方向的运动,即焊接头可进行x、y、z轴方向的任意位移运动。
21.所述焊接头安装支架204的前侧部位205安装焊接头,该焊接头利用六轴机器人1送来的焊丝进行在焊接机构2内进行焊接工作。
22.如图1及图2所示,六轴机器人1在送丝过程中,可以独立地进行x、y、z轴方向的送丝运动,而焊接机构2也可以独立地进行自身的x、y、z轴方向的运动,各自互不干涉,但又相互配合工作,通过六轴机器人1来精准定位送丝机构的送丝位置,使送丝机构位置与焊接光斑中心点位置分离开了,以达到工件的不同焊接点位需要不同送丝位置的需求。
23.本实用新型应用了具体个例对本实用新型的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本实用新型的方法及其核心思想。应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以对本实用新型进行若干改进和修饰,这些改进和修饰也落入本实用新型权利要求的保护范围内。
技术特征:
1.机器人送丝激光焊接机,其特征在于:是由六轴机器人和焊接机构组成;所述的六轴机器人和焊接机构共同固定安装在面板上;所述六轴机器人的前端设置有送丝机构安装架;该六轴机器人带动送丝机构安装架作x轴、y轴及z轴方向的位移工作。2.根据权利要求1所述的机器人送丝激光焊接机,其特征在于:焊接机构是由有z轴支架、x轴支架及y轴支架组成,所述的z轴支架内设置有z轴运行轨道,x轴支架内设置有x轴运行轨道,y轴支架内设置有y轴运行轨道;所述的z轴支架安装在y轴支架上,而y轴支架安装在x轴支架上;所述的z轴支架上还安装有焊接头安装支架,并且该焊接头安装支架与z轴支架相互垂直设置而成。3.根据权利要求1所述的机器人送丝激光焊接机,其特征在于:焊接头安装支架的前侧部位安装焊接头。
技术总结
机器人送丝激光焊接机是由六轴机器人和焊接机构组成;六轴机器人和焊接机构共同固定安装在面板上;六轴机器人的前端设置有送丝机构安装架;焊接机构是由有Z轴支架、X轴支架及Y轴支架组成,Z轴支架安装在Y轴支架上,而Y轴支架安装在X轴支架上;所述的Z轴支架上还安装有焊接头安装支架;本实用新型将送丝机构安装在六轴机器人上后,六轴机器人本身可带动送丝机构作X、Y、Z轴方向上的位移运动,因此送丝机构运动较为灵活,通过机器人送丝动作至焊接机构内进行焊接工作,进一步通过焊接机构的X、Y、Z三轴来精准定位,使送丝机构位置与焊接光斑中心点位置可相互分离,以达到工件的不同焊接点位需要不同送丝位置的需求。位需要不同送丝位置的需求。位需要不同送丝位置的需求。
技术研发人员:黄强 李林军 陈玉贵
受保护的技术使用者:厦门市三熠智能科技有限公司
技术研发日:2021.05.18
技术公布日:2021/11/17
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。