1.本实用新型为一种翻折机臂的地空两用四旋翼无人机,具体是一种利用翻折机构实现地空两用的小型无人机,适用于地空两用无人机领域。
背景技术:
2.无人驾驶飞机简称“无人机”,是利用动力驱动、机上无人机驾驶、结构简单的无人航空器。目前传统四旋翼无人机机动方式单一,无法实现地空两栖运动,无人机机架设计结构简单,空间适应性较差,其结构通常由四个刚性杆连接在上下底板上,因其没有相应的地面运动机构,这种结构在无法实现多种机动形式机动,存在一定的局限性并直接导致无人机适应能力下降。
3.折叠无人机是现代无人机技术和某些特殊的翻折机构结合诞生的新一代技术,其表现为在地面机动和空中机动变化结构,改变其几何尺寸从而达到收纳简便、强化无人机功能等目的。这项技术改善了无人机的空间适应性,还提升了无人机在自然环境中的适应能力,开拓了无人机新的应用场景。
4.目前市场上的大部分四旋翼无人机一般无翻折机构,无法实现地空两栖机动,运动形式单一,这对四旋翼无人机适应更复杂的环境极为不利,一小部分设计有翻折、折叠机构的地空两用四旋翼无人机结构较为复杂,其增设的机构虽然能解决地空两用的目标,但是也降低了无人机的有效载荷和续航里程。
技术实现要素:
5.针对在背景技术中提出的地空两用无人机目前的技术难点,提升无人机适应能力,本实用新型提供一种可翻折机臂结构,结构轻巧简单,布局合理,能很好地满足四旋翼无人机对重量空间适应性等方面的需求。
6.本实用新型解决上述问题采用的技术方案是:一种可折叠地空两用四旋翼无人机机架结构设计,包括机体、翻折机构、机臂、地面运动机构、旋翼机构,机体的两侧各有一个同机臂固定连接的翻折机构,机臂上两端安装有地面运动机构和旋翼机构。无人机共有两条,下底板两侧各有一条,机上翻折机构,地面运动机构、旋翼机构均以下底板几何对称中心线对称布置,单条机臂两端结构,包括两端的机上零部件均以机臂几何对称中心线对称布置。
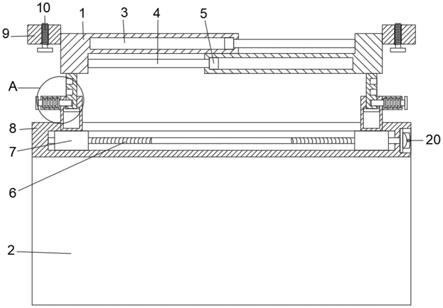
7.上述的一种翻折机臂的地空两用四旋翼无人机,所述机体由上底板、下底板、固定柱组成,所述的下底板通过固定柱与上底板固定连接,所述的下底板两侧各有一个用于安装翻折机构蜗轮蜗杆舵机的安装位。
8.上述的一种翻折机臂的地空两用四旋翼无人机,所述翻折机构主要是由蜗轮蜗杆舵机实现功能的,所述的蜗轮蜗杆舵机安装在下底板的安装座上,所述的蜗轮蜗杆转轴与机臂固定连接,通过舵机的精确转动以及蜗轮蜗杆舵机本身具有的自锁能力实现翻折机构的准确运动。
9.上述的一种翻折机臂的地空两用四旋翼无人机,所述地面运动机构由步进电机,步进电机安装座、运动齿轮接头、主动齿轮、从动齿轮、滑动轴承、丁字头、旋翼保护罩组成,步进电机安装在步进电机安装座上,步进电机安装座与机臂固定连接,主动轮连接头两端分别连接步进电机轴和主动齿轮,丁字头大端与机臂固定连接,丁字头轴上安装有滑动轴承,滑动轴承通过丁字头的轴肩和丁字头上的轴用弹性挡圈限位,主动齿轮和从动齿轮配合实现传动,从动齿轮与旋翼保护罩固定相连。
10.上述的一种翻折机臂的地空两用四旋翼无人机,所述的旋翼机构由丁字头、电机安装十字固件、无刷电机、螺旋桨和子弹头螺母组成,丁字头小端与两个重叠的电机安装十字固件固定连接,其中外端的电机十字固件与无刷电机固定连接,螺旋桨通过子弹头螺母固定在无刷电机轴上。
11.本实用新型的有益效果是,本实用新型地空两用无人机采用两组机臂向下垂直翻折,将四旋翼无人机保护罩转化为地面行走轮,实现四旋翼无人机地面行走能力,有效的利用了无人机机臂的空间结构,解决了传统无人机运动形式单一、部分地空两用四旋翼无人机存在的结构复杂、空间适应性差的问题,提升了无人机适应自然环境的能力。
附图说明
12.下面结合附图和实施例对本实用新型进一步说明。
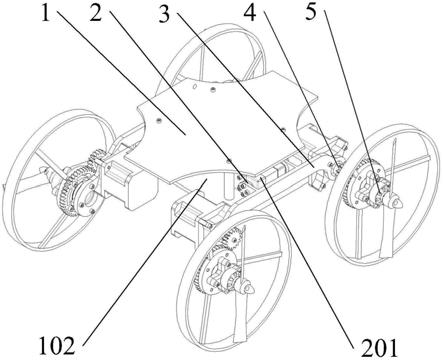
13.图1为本实用新型总体结构图;
14.图2为本实用新型飞行模式示意图;
15.图3为本实用新型地面模式示意图;
16.图4为地面运动机构补充示意图。
具体实施方式
17.下面结合附图进一步阐释本实用新型。
18.本实用新型为一种翻折机臂的地空两用四旋翼无人机,图1本实用新型总体结构图。本实用新型的一种翻折机构的地空两用四旋翼无人机包括机体1、翻折机构2、机臂3、地面运动机构4、旋翼机构5,机体1的两侧与翻折机构2连接,地面运动机构设置在机臂3两端,旋翼机构5安装在机臂3两端;机体1由上底板101、下底板102、固定柱103组成,上底板101通过四根固定柱103固定连接在下底板102上,下底板102两侧各固定连接有一个蜗轮蜗杆舵机201;翻折机构2由蜗轮蜗杆舵机201、机臂3组成,蜗轮蜗杆舵机201固定连接在下底板102的安装位上,机臂3固定连接在蜗轮蜗杆舵机201上;地面运动机构4由步进电机401、步进电机安装座402、运动轮接头403、主动齿轮404、从动齿轮405、滑动轴承406、丁字头407、旋翼保护罩408、弹性挡圈409组成,步进电机401固定连接在步进电机安装座402上,步进电机安装座402固定连接在机臂上3设置的安装孔301上,步进电机401的电机轴上固定连接有运动轮接头403的一端,主动齿轮404与运动轮接头403的另一端固定连接,主动齿轮404与从动齿轮啮合,机臂3两端与丁字头407大端固定连接,滑动轴承406内壁与丁字头407外壁滑动连接,弹性挡圈409安装在丁字头407上为滑动轴承限位,从动齿轮405内壁过盈配合连接在滑动轴承406外壁上,旋翼保护罩408固定连接在从动齿轮405上;旋翼机构5由电机安装十字固件501、无刷电机502、螺旋桨503和子弹头螺母504组成,旋翼机构5中的电机安装十字
固件501固定连接在丁字头407小端上,无刷电机502固定连接在电机安装十字固件501上,螺旋桨503由子弹头螺母504固定连接在无刷电机502的电机轴上,为更清楚的展示本实用新型地面运动机构内部机构,上述需结合图4地面运动机构补充示意图。
19.本实施例中,在无人机用于飞行机动时,如图2所示,蜗轮蜗杆舵机201旋转驱动至机臂3将螺旋桨503与下底板102平行时停止工作并自锁,旋翼机构5启动执行飞行任务;在无人机用于地面机动时,如图3所示,蜗轮蜗杆舵机201在飞行模式的基准下向下旋转90
°
,无人机转化为地面行走模式,步进电机401驱动运动轮接头403,运动轮接头403固定连接在主动齿轮404上,从动齿轮405配合主动齿轮404,从动齿轮405带动旋翼保护罩408完成地面运动,通过两种模式的转换实现无人机地空两用的目的。
技术特征:
1.一种翻折机臂的地空两用四旋翼无人机,包括机体(1)、翻折机构(2)、机臂(3)、地面运动机构(4)、旋翼机构(5),其特征在于:所述的机体(1)两侧固定连接有翻折机构(2),所述的翻折机构(2)中的机臂(3)上固定连接有地面运动机构(4)和旋翼机构(5),其中地面运动机构(4)和旋翼机构(5)均布置在机臂(3)的两端并关于机臂对称分布。2.根据权利要求1所述的一种翻折机臂的地空两用四旋翼无人机,其特征在于,所述翻折机构(2)中的蜗轮蜗杆舵机(201)对称设置在下底板(102)上,并通过舵机
‑
机臂的形式实现四旋翼无人机地空两用的技术方案。3.根据权利要求1所述的一种翻折机臂的地空两用四旋翼无人机,其特征在于:所述地面运动机构(4)布置在机臂(3)上,其传动路线为由步进电机(401)带动运动轮接头(403),所述运动轮接头(403)带动主动齿轮,所述主动齿轮啮合从动齿轮(405),所述从动齿轮(405)驱动旋翼保护罩实现运动。
技术总结
本实用新型为一种翻折机臂的地空两用四旋翼无人机,具体是一种利用翻折机构实现地空两用的小型无人机,适用于地空两用无人机领域,包括机体(1),机体(1)下底板(102)为对称结构,在对称轴两侧设置有两个蜗轮蜗杆舵机(201);翻折机构(2)通过机臂(3)和蜗轮蜗杆舵机(201)实现地空两用的关键结构变换;地面运动机构(4)设置在机臂的两端,地面运动机构(4)通过一套传动链,实现地面运动;旋翼机构(5)固定在丁字头(407)上,为无人机执行飞行任务时提供动力。本实用新型可利用一种翻折机臂机构实现四旋翼无人机的地面模式、空中模式两种机动方式的转换,螺旋桨保护罩得到了充分利用,用以实现地面行走,改善了四旋翼无人机空间适应性、环境适应性。环境适应性。环境适应性。
技术研发人员:王伟 贺宇龙
受保护的技术使用者:东北林业大学
技术研发日:2021.06.11
技术公布日:2021/11/17
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。