1.本实用新型涉及吊舱技术领域,具体为一种高精度小型化光电吊舱。
背景技术:
2.光电吊舱技术及其吊舱是光电侦察告警技术及其装备中的重要组成部分,更是无人机侦察的核心装备,它将填补专门有人驾驶飞机战术侦察角色,为此都正在大力开发各种用途的光电吊舱,光电吊舱可广泛用于陆地,海上,空中和空间的侦察中,其载体为车辆,舰艇,飞机和卫星等,由于光电吊舱是搭载于运动载体上,载体的滚动,振动等都会影响各种光电传感器视轴的抖动,造成图像模糊,定位不准的现象,这是不允许的,所以光电吊舱的最基本,最关键技术就是视轴稳定技术,提高装备生存能力的方向发展,因此要求光电吊舱装备技术先进,手段多样,空间广延,时间连续以及传递信息快速。
3.无人机在飞行过程中,往往需要利用光电吊舱进行观察,目前市面上的光电吊舱体积较大,结构相对复杂,从而增加生产成本,为此提出一种高精度小型化光电吊舱。
技术实现要素:
4.本实用新型的目的在于提供一种高精度小型化光电吊舱,以解决上述背景技术中提出的问题。
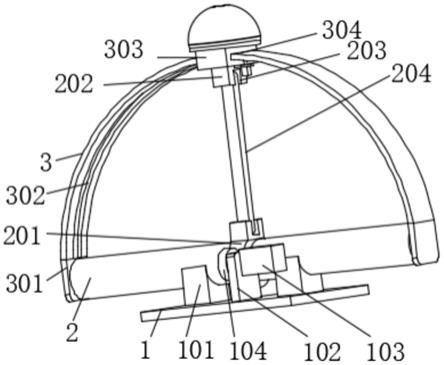
5.为实现上述目的,本实用新型提供如下技术方案:一种高精度小型化光电吊舱,包括底座,所述底座顶部分别固定连接有支撑块和第一固定块,所述支撑块顶部固定连接有固定柱,所述固定柱中部转动连接有转动环,所述固定柱两端均转动连接有固定板,所述固定板顶部固定连接有弧形板,所述弧形板外侧滑动连接有滑动块,所述滑动块顶部固定连接有支撑板。
6.优选的,所述固定柱两端均开设有转动槽,所述转动槽内部转动连接有转动柱,且转动柱和固定板固定连接。
7.优选的,所述转动环顶部和滑动块底部均固定连接有连接块,所述连接块内部均开设有凹槽,所述凹槽内壁均固定连接有固定杆,所述固定杆之间铰接有连接杆,所述连接杆两端均开设有通孔。
8.优选的,所述底座中部固定连接有第一固定块,所述第一固定块一侧固定连接有第一电机,所述第一电机输出端固定连接有第一主动轮,且第一主动轮和转动环相适配。
9.优选的,所述弧形板内部开设有弧形槽,所述滑动块内部开设有滑动槽,且滑动槽和弧形板相适配,所述滑动块底部固定连接有第二固定块,所述第二固定块底部固定连接有第二电机,所述第二电机输出端固定连接有第二主动轮,且第二主动轮和弧形槽相适配。
10.优选的,所述支撑板顶部转动连接有转台,所述转台顶部固定连接有吊舱。
11.与现有技术相比,本实用新型的有益效果是:
12.(1)、该高精度小型化光电吊舱,通过弧形板、固定柱和滑动块的设置,实现了能够通过弧形板、滑动块和固定柱的配合进行转动,缩小了体积,结构相对简单,进而降低了生
产成本。
13.(2)、该高精度小型化光电吊舱,通过支撑板和转台的设置,实现了能够通过支撑板支撑转台带动光电吊舱旋转,进而提高了可视角度。
附图说明
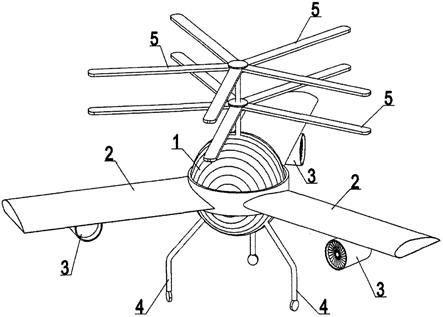
14.图1为本实用新型的正轴测图结构示意图;
15.图2为本实用新型的主剖视图结构示意图;
16.图3为本实用新型的弧形板局部放大结构示意图。
17.图中:1、底座;101、支撑块;102、第一固定块;103、第一电机;104、第一主动轮;2、固定柱;201、转动环;202、连接块;203、凹槽;204、连接杆;205、转动槽;206、固定杆;207、通孔;3、弧形板;301、固定板;302、弧形槽;303、滑动块;304、滑动槽;305、第二电机;306、第二固定块;307、第二主动轮;308、转动柱;4、支撑板;401、转台。
具体实施方式
18.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
19.需要说明的是,在本实用新型的描述中,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,并不是指示或暗示所指的装置或元件所必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
20.此外,应当理解,为了便于描述,附图中所示出的各个部件的尺寸并不按照实际的比例关系绘制,例如某些层的厚度或宽度可以相对于其他层有所夸大。
21.应注意的是,相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义或说明,则在随后的附图的说明中将不需要再对其进行进一步的具体讨论和描述。
22.如图1
‑
3所示,本实用新型提供一种技术方案:一种高精度小型化光电吊舱,包括底座1,底座1顶部固定连接有支撑块101,底座1中部固定连接有第一固定块102,第一固定块102一侧固定连接有第一电机103,第一电机103输出端固定连接有第一主动轮104,且第一主动轮104和转动环201相适配,第一电机103转动进而带动第一主动轮104转动,进而传动轮104和转动环201摩擦副传动,支撑块101顶部固定连接有固定柱2,固定柱2两端均开设有转动槽205,转动槽205内部转动连接有转动柱308,且转动柱308和固定板301固定连接,固定柱2中部转动连接有转动环201,转动环201顶部和滑动块303底部均固定连接有连接块202,连接块202内部均开设有凹槽203,凹槽203内壁均固定连接有固定杆206,固定杆206之间铰接有连接杆204,连接杆204两端均开设有通孔207,固定柱2两端均转动连接有固定板301,固定板301顶部固定连接有弧形板3,弧形板3内部开设有弧形槽302,滑动块303内部开设有滑动槽304,且滑动槽304和弧形板3相适配,滑动块303底部固定连接有第二固定块
306,第二固定块306底部固定连接有第二电机305,第一电机103和第二电机305均为伺服电机,可控制速度,位置精度非常准确,可以将电压信号转化为转矩和转速以驱动控制对象,且具有机电时间常数小,线性度高等特性,可把所收到的电信号转换成电动机轴上的角位移或角速度输出,第二电机305输出端固定连接有第二主动轮307,且第二主动轮307和弧形槽302相适配,第二主动轮307一侧和弧形槽302一侧摩擦副传动,弧形板3外侧滑动连接有滑动块303,滑动块303顶部固定连接有支撑板4,支撑板4顶部转动连接有转台401,转台401顶部固定连接有吊舱,光电吊舱有多个传感器,短焦彩色ccd摄像机、长焦黑白和彩色ccd摄像机、激光测距机、短、中、k波红外热像仪、目标指示器等,从可见光到红外波段有几十个频带,空间分辨力从几厘米到几米,根据需要它们可以两个或两个以上进行组合,同时各传感器探测到的数据和图像要经过编码、融合、压缩、处理后传输给情报分析处理部门。
23.当使用此设备时,首先第一电机103带动第一主动轮104旋转,进而第一主动轮104旋转带动转动环201沿着固定柱2旋转,进而带动连接杆204摆动,接着转动柱308沿着转动槽205旋转,同时第二电机305带动第二主动轮307旋转,进而第二主动轮307沿着弧形槽302摆动,滑动块303沿着弧形板3摆动,转台401带动光电吊舱转动,进而完成开机检测,进而通过第二电机305和第一电机103不断调整确保支撑板4稳定,接着通过转动转台401控制光电吊舱转动观察,控制第一电机103和第二电机305进行偏转。
24.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。