1.本实用新型涉及一种抓包机械手,尤其涉及一种饲料袋抓包机械手。
背景技术:
2.机械手配合工业机器人已经应用于各种自动化生产的场合,在饲料生产线上,包装好的饲料需要有序堆放,规整码垛,使用人工搬运饲料袋,无法平整的将饲料袋从一个位置转移到另一个位置,进行堆放码垛时会破坏原本在料袋中分布均匀的饲料状态,因此无法摆放出整齐划一的饲料垛。
3.且饲料袋具有一定的质量,长时间人工搬运会使搬运人员疲劳,导致搬运效率下降。
技术实现要素:
4.本实用新型为解决现有技术中存在的问题,提出了一种饲料袋抓包机械手。
5.该机械手包括:相向设置的一组通过旋转进行开合动作的开合机械手,位于开合机械手之间,进行上下移动的伸缩固定手;
6.其中,开合机械手包括:若干并排设置的l形手指,并排的l形手指由上下两根横杆连接为一体,上方的横杆与旋转驱动臂固定连接,伸缩固定手移动至下极限位时,l形手指底面距离伸缩固定手之间的距离等于饲料袋的厚度。
7.进一步地,为了驱动开合机械手自动完成开合动作,旋转驱动臂与转轴两端固定连接,转轴上还套着固定连接的齿轮,齿轮与安装在水平气缸出杆端的齿条互相啮合。
8.进一步地,转轴与固定在基板下方的挂板铰接,水平气缸固定在基板两侧。
9.进一步地,为了确保齿条在水平气缸的出杆端平稳移动,齿条与滑块固定为一体,滑块与固定在基板底部的导轨滑动连接,导轨的长度方向与水平气缸出杆方向平行。
10.进一步地,伸缩固定手底部为垂直于伸缩方向的压板,压板固定在垂直气缸的出杆端,垂直气缸安装在基板上。
11.进一步地,压板与垂直气缸的出杆端之间通过转接加长杆连接,对于大小、厚度不同的饲料袋,可更换长度不同的转接加长杆进行兼容。
12.本实用新型的技术效果在于:该机械手适宜安装在可灵活移动的机器人上,通过气动控制,实现平稳抓取生产线上的袋装饲料,由于抓取后,需要进行快速的位移,为了避免饲料袋在位移过程中滑落,增加伸缩固定手进行辅助,将袋装饲料压紧在并排设置的l形手指上。
13.开合机械手的开合设计,可以使l形手指在旋转驱动臂的带动下张开后,整个机械手下移,再驱动l形手指闭合,使l形手指从袋装饲料的下方向上托起,完成抓包动作,饲料袋内的饲料状态不会发生变化,保证摆放出整齐划一的饲料垛。
附图说明
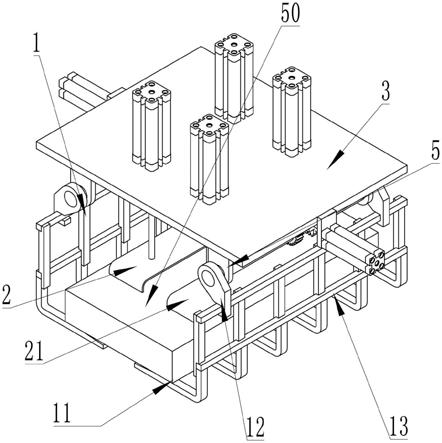
14.图1是本实用新型中机械手的轴测图;
15.图2是本实用新型中机械手主视图。
16.图中,1.开合机械手,2.伸缩固定手,3.基板,4.转轴,5.挂板,6.齿轮,7.齿条,8.滑块,9.导轨,10.水平气缸,11.l形手指,12.旋转驱动臂,13.横杆,20.垂直气缸,21.压板,22.转接加长杆,50.饲料袋。
具体实施方式
17.下面结合图1至图2对本实用新型的实施方式进行具体说明。
18.图1示意了机械手的整体结构,该机械手包括:相向设置的一组通过旋转进行开合动作的开合机械手1,位于开合机械手1之间,进行上下移动的伸缩固定手2,其中,开合机械手1包括:若干并排设置的l形手指11,并排的l形手指11由上下两根横杆13连接为一体,上方的横杆13与旋转驱动臂12固定连接,伸缩固定手2移动至下极限位时,l形手指11底面距离伸缩固定手2之间的距离等于饲料袋50的厚度。
19.伸缩固定手2底部为垂直于伸缩方向的压板21,压板21固定在垂直气缸20的出杆端,垂直气缸20安装在基板3上。
20.图2示意了机械手的传动结构,旋转驱动臂12与转轴4两端固定连接,转轴4上还套着固定连接的齿轮6,齿轮6与安装在水平气缸10出杆端的齿条7互相啮合,转轴4与固定在基板3下方的挂板5铰接,水平气缸10固定在基板3两侧,齿条7与滑块8固定为一体,滑块8与固定在基板3底部的导轨9滑动连接,导轨9的长度方向与水平气缸10出杆方向平行。
21.压板21与垂直气缸20的出杆端之间通过转接加长杆22连接。
22.工作原理:抓包前,水平气缸10的出杆端伸出,通过齿条7驱动齿轮6旋转,带动转轴4在挂板5上一起转动,由于旋转驱动臂12固定在转轴两端,此时开合机械手1向两侧张开,整个机械手下移至适当高度,水平气缸10的出杆端回收,带动开合机械手1闭合,l形手指1拖住饲料袋50底部,垂直气缸20的出杆端向下伸出,使压板21作用于饲料袋50顶部。
23.整个机械手移动至放包位置后,水平气缸10的出杆端再次伸出,饲料袋50垂直落下,垂直气缸20的出杆端收缩,使压板21位于上位,准备抓取下一个饲料袋50.
24.最后应说明的是:以上实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型实施例技术方案的范围。
技术特征:
1.一种饲料袋抓包机械手,其特征在于,该机械手包括:相向设置的一组通过旋转进行开合动作的开合机械手(1),位于开合机械手(1)之间,进行上下移动的伸缩固定手(2);其中,开合机械手(1)包括:若干并排设置的l形手指(11),并排的l形手指(11)由上下两根横杆(13)连接为一体,上方的横杆(13)与旋转驱动臂(12)固定连接;伸缩固定手(2)移动至下极限位时,l形手指(11)底面距离伸缩固定手(2)之间的距离等于饲料袋(50)的厚度。2.根据权利要求1所述的饲料袋抓包机械手,其特征在于,所述旋转驱动臂(12)与转轴(4)两端固定连接,转轴(4)上还套着固定连接的齿轮(6),齿轮(6)与安装在水平气缸(10)出杆端的齿条(7)互相啮合。3.根据权利要求2所述的饲料袋抓包机械手,其特征在于,所述转轴(4)与固定在基板(3)下方的挂板(5)铰接,水平气缸(10)固定在基板(3)两侧。4.根据权利要求3所述的饲料袋抓包机械手,其特征在于,所述齿条(7)与滑块(8)固定为一体,滑块(8)与固定在基板(3)底部的导轨(9)滑动连接,导轨(9)的长度方向与水平气缸(10)出杆方向平行。5.根据权利要求3所述的饲料袋抓包机械手,其特征在于,所述伸缩固定手(2)底部为垂直于伸缩方向的压板(21),压板(21)固定在垂直气缸(20)的出杆端,垂直气缸(20)安装在基板(3)上。6.根据权利要求5所述的饲料袋抓包机械手,其特征在于,所述压板(21)与垂直气缸(20)的出杆端之间通过转接加长杆(22)连接。
技术总结
本实用新型提供了一种饲料袋抓包机械手,该机械手包括:相向设置的一组通过旋转进行开合动作的开合机械手,位于开合机械手之间,进行上下移动的伸缩固定手;其中,开合机械手包括:若干并排设置的L形手指,并排的L形手指由上下两根横杆连接为一体,上方的横杆与旋转驱动臂固定连接,伸缩固定手移动至下极限位时,L形手指底面距离伸缩固定手之间的距离等于饲料袋的厚度,主要用于将袋装饲料平稳抓取或释放。放。放。
技术研发人员:李峰
受保护的技术使用者:宁夏大洋饲料科技有限公司
技术研发日:2021.02.08
技术公布日:2021/11/17
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。