1.本实用新型涉及一种手套自动包装机,尤其涉及一种医用橡胶手套自动包装机。
背景技术:
2.医用橡胶手套通常用于医疗检查过程中,而且一般都是一次性用品,在医疗卫生活动中,每天消耗的医用橡胶手套是巨大的。
3.工厂在生产医用橡胶手套时,前序工序一般为自动化生产,但在包装时,通常使用人工进行包装,首先工人需要把撕扯完多余边角料的手套放在一块两侧向上卷起收纳板上,然后把手套整理进收纳板内,使用收纳板把手套带进包装盒内,然后斜向上抽出收纳板,使得收纳板脱离包装盒而手套则留在包装盒内。这样的人工包装手套费事费力,生产效率低下。
技术实现要素:
4.为了克服现有技术存在的缺点,本实用新型提供一种医用橡胶手套自动包装机,能自动模仿人工包装手套的操作,辅助人工进行手套的包装,提高了生产效率。
5.为达此目的,本实用新型采用以下技术方案:
6.本实用新型提供了一种医用橡胶手套自动包装机,包括:
7.底座;
8.侧板,所述底座一侧设置有所述侧板;
9.支撑块,所述底座上设置有所述支撑块;
10.第一滑轨,所述支撑块上设置有所述第一滑轨;
11.收纳部,所述第一滑轨内滑动式设置有所述收纳部;
12.推动机构,所述底座上设置有所述推动机构,所述推动机构驱动所述收纳部在所述第一滑轨内移动;
13.手部机构,所述侧板靠近所述推动机构一侧设置有所述手部机构,所述手部机构整理在所述收纳部上的手套进入所述收纳部内;
14.翻转机构,所述底座远离所述侧板一侧上设置有所述翻转机构,所述翻转机构上放置有包装盒,所述翻转机构与所述第一滑轨对接。
15.作为上述技术方案的进一步改进,所述推动机构包括:
16.推动柱,所述推动柱远离所述侧板一端与所述收纳部相连,另一端穿过所述侧板,靠近所述收纳部部分的所述推动柱为多截所述推动柱互相铰接而成;
17.第一螺母块,所述推动柱远离所述收纳部的一端设置有所述第一螺母块;
18.第一丝杆,所述第一螺母块内配合设置有所述第一丝杆,所述第一丝杆穿过所述侧板且与其转动配合;
19.第一齿轮,所述第一丝杆靠近所述收纳部一端设置有所述第一齿轮;
20.第一动力齿轮,所述第一齿轮下方啮合设置有所述第一动力齿轮。
21.作为上述技术方案的进一步改进,所述手部机构包括:
22.导柱,所述侧板靠近所述翻转机构一侧设置有所述导柱;
23.第二丝杆,所述侧板靠近所述翻转机构一侧设置有所述第二丝杆,所述第二丝杆与所述导柱关于所述侧板对称设置;
24.滑套,所述导柱上滑动式设置有所述滑套;
25.第二螺母块,所述第二丝杆上配合设置有所述第二螺母块;
26.下压缸,所述滑套与所述第二螺母块之间设置有所述下压缸,所述下压缸的输出轴朝下;
27.连接板,所述下压缸的输出轴上设置有所述连接板;
28.整理部,所述连接板下侧设置有所述整理部,所述整理部能整理在所述收纳部上的手套进入所述收纳部内。
29.作为上述技术方案的进一步改进,所述翻转机构包括:
30.轴承座,所述底座远离所述侧板一侧上设置有所述轴承座;
31.转轴,所述轴承座上侧转动式设置有所述转轴;
32.承载头,所述转轴一端设置有所述承载头;
33.支撑座,所述承载头上对称设置有所述支撑座;
34.第二滑轨,靠近所述第一滑轨一侧的所述支撑座上设置有所述第二滑轨,所述第二滑轨能与所述第一滑轨对接;
35.放置板,另一所述支撑座上设置有所述放置板;
36.第二齿轮,所述转轴另一端设置有所述第二齿轮;
37.第二动力齿轮,所述第二齿轮下侧啮合设置有所述第二动力齿轮。
38.作为上述技术方案的进一步改进,所述收纳部包括:
39.滑块,所述第一滑轨内滑动式设置有所述滑块,所述滑块与所述推动柱相连;
40.推动块,所述滑块上设置有所述推动块;
41.收纳板,所述推动块靠近所述翻转机构一端设置有所述收纳板,所述收纳板为两侧向上翻卷而成的薄膜板;
42.所述第一滑轨上对称间隔设置有垫板,所述推动柱的直径小于所述垫板之间的间隔。
43.作为上述技术方案的进一步改进,所述整理部包括:
44.下压杆,所述连接板的下侧设置有所述下压杆;
45.轴承块,所述下压杆下端对称设置有所述轴承块;
46.第一连接轴,所述轴承块之间转动式对称设置有所述第一连接轴,所述第一连接轴的端部均穿过所述轴承块;
47.连杆,所述第一连接轴均与两根所述连杆的上端相连,所述连杆之间的形状呈“八”字形;
48.第二连接轴,所述连杆下端均设置有所述第二连接轴;
49.整平筒,所述第二连接轴上均转动式对称设置有所述整平筒;
50.扭转弹簧,所述第一连接轴的端部与所述轴承块之间均设置有所述扭转弹簧,所述扭转弹簧一端与现应的所述第一连接轴的端部相连,另一端均与所述轴承块相连。
51.作为上述技术方案的进一步改进,所述放置板包括均与间隔水平设置的条形板和竖直设置的底板,所述底板设置在所述条形板远离所述底座的一侧,中间的所述条形板下侧与远离所述底座一侧的所述支撑座相连。
52.作为上述技术方案的进一步改进,所述整平筒为abs塑料材质制成。
53.作为上述技术方案的进一步改进,所述下压缸为气动缸。
54.作为上述技术方案的进一步改进,所述底座下侧设置有呈“l”形的夹板,所述夹板为弹性板,且朝向所述侧板一侧。
55.本实用新型的有益效果为:1、当手部机构移动到收纳板的正上方时,下压缸推动整理部往下移动,整平筒把位于收纳板上的手套下压进收纳板内,整理部继续往下移动,连杆之间的形状呈“八”字形,由于反作用力的影响,整平筒由内相两侧滚动,连杆之间被撑开,扭转弹簧被扭转,整平筒由内相两侧滚动会使得手套两侧整理进入收纳板向上卷起的两侧内,从而使得手套完整的进入到收纳板内,这样模仿人手整理手套的动作,可以使得手套被包装进入包装盒内不会凌乱,完整的还原了人工手部整理手套的动作,且使用的是机械运动,相比于人手会由于工作时间长久疲劳,利用机械运动可以解决这一问题,可以提高工作效率。
56.2、底座下侧设置有呈“l”形的夹板,夹板为弹性板,且朝向侧板一侧,可以使得整个包装机夹住桌面边角处,易于安装和移动,不占位置。
附图说明
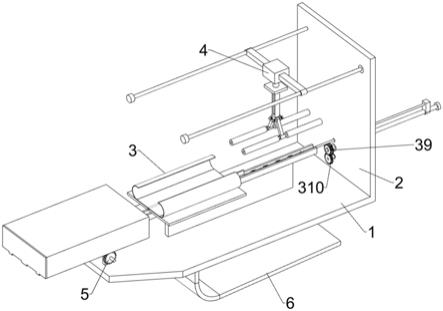
57.图1为本实用新型的第一种立体结构示意图。
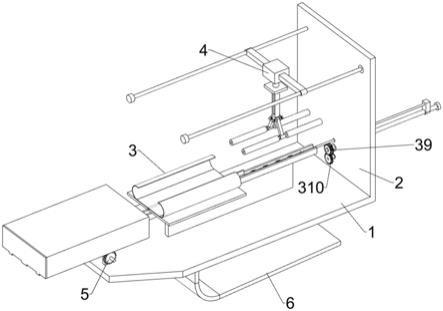
58.图2为本实用新型的第二种立体结构示意图。
59.图3为本实用新型的第一种部分立体结构示意图。
60.图4为本实用新型的第二种部分立体结构示意图。
61.图5为本实用新型的第三种部分立体结构示意图。
62.图6为本实用新型的第四种部分立体结构示意图。
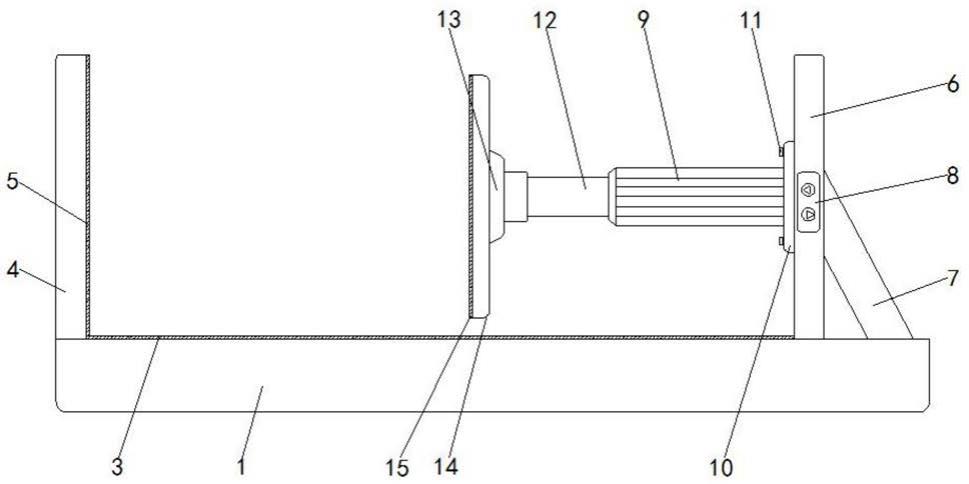
63.图7为本实用新型的第五种部分立体结构示意图。
64.其中,上述附图包括以下附图标记:1、底座,2、侧板,3、推动机构,31、支撑块,32、第一滑轨,33、滑块,34、推动块,35、收纳板,36、推动柱,37、第一螺母块,38、第一丝杆,39、第一齿轮,310、第一动力齿轮,4、手部机构,41、导柱,42、第二丝杆,43、滑套,44、下压缸,45、连接板,46、下压杆,47、轴承块,48、第一连接轴,49、连杆,410、第二连接轴,411、整平筒,412、扭转弹簧,413、第二螺母块,5、翻转机构,51、轴承座,52、转轴,53、承载头,54、支撑座,55、第二滑轨,56、放置板,57、第二齿轮,58、第二动力齿轮,6、夹板。
具体实施方式
65.现在将参照附图在下文中更全面地描述本实用新型,在附图中示出了本实用新型当前优选的实施方式。然而,本实用新型可以以许多不同的形式实施,并且不应被解释为限于本文所阐述的实施方式;而是为了透彻性和完整性而提供这些实施方式,并且这些实施方式将本实用新型的范围充分地传达给技术人员。
66.如图1
‑
7所示,一种医用橡胶手套自动包装机,包括底座1、侧板2、支撑块31、第一
滑轨32、收纳部、推动机构3、手部机构4和翻转机构5,底座1一侧设置有侧板2,底座1上设置有支撑块31,支撑块31上设置有第一滑轨32,第一滑轨32内滑动式设置有收纳部,底座1上设置有推动机构3,推动机构3驱动收纳部在第一滑轨32内移动,侧板2靠近推动机构3一侧设置有手部机构4,手部机构4整理在收纳部上的手套进入收纳部内,底座1远离侧板2一侧上设置有翻转机构5,翻转机构5上放置有包装盒,翻转机构5与第一滑轨32对接。
67.推动机构3包括推动柱36、第一螺母块37、第一丝杆38、第一齿轮39和第一动力齿轮310,推动柱36远离侧板2一端与收纳部相连,另一端穿过侧板2,靠近收纳部部分的推动柱36为多截推动柱36互相铰接而成,推动柱36远离收纳部的一端设置有第一螺母块37,第一螺母块37内配合设置有第一丝杆38,第一丝杆38穿过侧板2且与其转动配合,第一丝杆38靠近收纳部一端设置有第一齿轮39,第一齿轮39下方啮合设置有第一动力齿轮310。
68.手部机构4包括导柱41、第二丝杆42、滑套43、第二螺母块413、下压缸44、连接板45和整理部,侧板2靠近翻转机构5一侧设置有导柱41,侧板2靠近翻转机构5一侧设置有第二丝杆42,第二丝杆42与导柱41关于侧板2对称设置,导柱41上滑动式设置有滑套43,第二丝杆42上配合设置有第二螺母块413,滑套43与第二螺母块413之间设置有下压缸44,下压缸44的输出轴朝下,下压缸44的输出轴上设置有连接板45,连接板45下侧设置有整理部,整理部能整理在收纳部上的手套进入收纳部内。
69.翻转机构5包括轴承座51、转轴52、承载头53、支撑座54、第二滑轨55、放置板56、第二齿轮57、第二动力齿轮58,底座1远离侧板2一侧上设置有轴承座51,轴承座51上侧转动式设置有转轴52,转轴52一端设置有承载头53,承载头53上对称设置有支撑座54,靠近第一滑轨32一侧的支撑座54上设置有第二滑轨55,第二滑轨55能与第一滑轨32对接,另一支撑座54上设置有放置板56,转轴52另一端设置有第二齿轮57,第二齿轮57下侧啮合设置有第二动力齿轮58。
70.收纳部包括滑块33、推动块34和收纳板35,第一滑轨32内滑动式设置有滑块33,滑块33与推动柱36相连,滑块33上设置有推动块34,推动块34靠近翻转机构5一端设置有收纳板35,收纳板35为两侧向上翻卷而成的薄膜板,第一滑轨32上对称间隔设置有垫板,推动柱36的直径小于垫板之间的间隔。
71.整理部包括下压杆46、轴承块47、第一连接轴48、连杆49、第二连接轴410、整平筒411和扭转弹簧412,连接板45的下侧设置有下压杆46,下压杆46下端对称设置有轴承块47,轴承块47之间转动式对称设置有第一连接轴48,第一连接轴48的端部均穿过轴承块47,第一连接轴48均与两根连杆49的上端相连,连杆49之间的形状呈“八”字形,连杆49下端均设置有第二连接轴410,第二连接轴410上均转动式对称设置有整平筒411,第一连接轴48的端部与轴承块47之间均设置有扭转弹簧412,扭转弹簧412一端与现应的第一连接轴48的端部相连,另一端均与轴承块47相连。
72.进一步地,放置板56包括均与间隔水平设置的条形板和竖直设置的底板,底板设置在条形板远离底座1的一侧,中间的条形板下侧与远离底座1一侧的支撑座54相连。
73.进一步地,整平筒411为abs塑料材质制成。
74.进一步地,下压缸44为气动缸。
75.进一步地,底座1下侧设置有呈“l”形的夹板6,夹板6为弹性板,且朝向侧板2一侧,可以使得整个包装机夹住桌面边角处,易于安装和移动,不占位置。
76.工作原理:把带包装的手套放置在收纳板35上,第二丝杆42正传,从而使得第二螺母块413带动手部机构4在导柱41往靠近收纳板35的正上方移动,当手部机构4移动到收纳板35的正上方时,下压缸44推动整理部往下移动,整平筒411把位于收纳板35上的手套下压进收纳板35内,整理部继续往下移动,连杆49之间的形状呈“八”字形,由于反作用力的影响,整平筒411由内相两侧滚动,连杆49之间被撑开,扭转弹簧412被扭转,整平筒411由内相两侧滚动会使得手套两侧整理进入收纳板35向上卷起的两侧内,从而使得手套完整的进入到收纳板35内,这样模仿人手整理手套的动作,可以使得手套被包装进入包装盒内不会凌乱,完整的还原了人工手部整理手套的动作,且使用的是机械运动,相比于人手会由于工作时间长久疲劳,利用机械运动可以解决这一问题,可以提高工作效率,当手部机构4整理完成手套之后,下压缸44复位,第一丝杆38复位从而使得整个手部机构4复位;
77.把包装盒水平放置在放置板56且盒口朝向底座1,当手部机构4复位之后,第一动力齿轮310正转,从而带动第一齿轮39转动,进而使得第一丝杆38转动,从而使得第一螺母块37推动推动柱36往靠近翻转机构5方向移动,进而推动滑块33在第一滑轨32内往靠近翻转机构5方向移动,从而带动推动块34和收纳板35往靠近翻转机构5方向移动,当滑块33移动到第二滑轨55上时,收纳板35进入到包装盒内,第二动力齿轮58正转驱动第二齿轮57转动,从而使得转轴52转动,进而使得承载头53带动两侧的支撑座54转动,进而使得放置板56往下转动一定角度,第二滑轨55带动滑块33往上转动一定角度,进而使得收纳板35和往下倾斜,位于收纳板35内的手套在重力的作用下往下滑入包装盒内,而靠近收纳部部分的推动柱36为多截推动柱36互相铰接而成,同时推动柱36的直径小于垫板之间的间隔,使得推动柱36可以往上扭转通过垫板之间的间隔,从而不会对第二滑轨55带动滑块33往上转动一定角度而造成干涉,之后复位翻转机构5和推动机构3,如此反复即可对大量的手套进行包装作业,提高了工作效率。
78.以上所述实施例仅表达了本实用新型的优选实施方式,其描述较为具体和详细,但并不能因此而理解为对本实用新型专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形、改进及替代,这些都属于本实用新型的保护范围。因此,本实用新型专利的保护范围应以所附权利要求为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。