1.本实用新型涉及带式输送机监测保护技术领域,具体地涉及一种带式输送机巡检机器人。
背景技术:
2.带式输送机因其具有可连续工作、稳定性高、运量大等特点,广泛应用于矿山、冶金、煤炭、电力、港口、水泥等工业生产领域。带式输送机一般以整个输送系统存在,多条搭接,数量众多,其中越野带式输送机,单机从几公里到十几公里长,距离长,故障点多,人工巡检效率低下,如果发现故障不及时,小故障易演变成重大故障,甚至引起安全事故,严重影响整个输送系统的工作效率。
3.目前,现有的带式输送机大部分还是以人工巡检为主,巡检效率低,巡检工人劳动强度大;极少部分带式输送机采用了巡检机器人巡检,现有的机器人常规有轮式巡检机器人、履带式巡检机器人、轨道式巡检机器人,其中轨道式巡检机器人一般是单独架设轨道,增加前期的投资。如中国专利201910591134 .8公开了一种用于带式输送机的机器人巡检系统及其巡检方法,包括巡检机器人本体,其设置在一行走导轨上,且其具有一在所述行走导轨上移动的行走机构,所述行走导轨其安装在带式输送机上并位于带式输送机的上层托辊和下层托辊之间;至少一组充电桩或/和除尘装置,所述充电桩和除尘装置设置在行走导轨外侧,并与所述巡检机器人本体的位置对应设置;但由于该技术方案中,需要单独架设行走导轨,占用空间大,前期投资成本高。中国专利cn202010562681.6公开了一种钢丝绳牵引式煤矿井下带式输送机循环检测系统,包括架空索道系统、抱索器、带式输送机状态监测设备、监控后台系统,通过电网供电驱动架空索道系统运转,使得其上的带式输送机状态监测设备能够平稳地沿带式输送机的运输带上方巡检,带式输送机状态监测设备本身设置的蓄电池仅用于提供传感与通信设备的电能,以此延长电池使用时长;各带式输送机状态监测设备之间互为基站,并能够通过安装在输送带上的无线射频模块实时定位巡检现场,上传各数据信息。但该技术方案结构复杂,安装不便。
技术实现要素:
4.本实用新型的目的在于提供一种占用空间小、节能环保、安装方便的带式输送机巡检机器人。
5.本实用新型解决其技术问题所采取的技术方案是:
6.一种带式输送机巡检机器人,包括型钢和以型钢为行走轨道的检测机器人;所述型钢上设置充电线圈模块;所述检测机器人包括机器人本体和设置在机器人本体上的用于驱动检测机器人沿型钢行走的动力轮、用于提供检测机器人与型钢之间的吸附力的永磁体、磁感应充电模块和检测系统;所述磁感应充电模块与动力轮无线连接,充电线圈模块与磁感应充电模块连接,充电线圈模块通过磁感应充电模块为动力轮供电;所述检测系统用于对带式输送机进行巡检,通过检测机器人带动检测系统在型钢上行走,从而对输送机进
行巡检。
7.进一步的,所述充电线圈模块与充电桩连接,充电桩为充电线圈模块供电,从而为检测机器人提供电能。所述充电桩优选为太阳能充电。
8.进一步的,所述型钢上还设有两个电磁铁;两个电磁铁同极性相对放置;所述机器人本体上还设置有霍尔传感器;当检测机器人行走至两个电磁铁之间时,霍尔传感器有一个电压输出,电压大小与位移大小成正比,当检测机器人行走至两个电磁铁中间时,霍尔传感器的磁感应强度为零,此时将两个电磁铁的中间位置作为检测机器人位移的零点,用于采集检测机器人的位移情况。
9.进一步的,两个所述电磁铁所在的直线与输送机的输送方向平行,其中一个电磁铁靠近型钢的尾端,另一电磁铁靠近型钢的始端,所述充电线圈模块位于两个电磁铁之间,利用检测轨道上磁极的方式进行充电定位,精准定位。
10.进一步的,所述动力轮包括两个,均设置在机器人本体靠近型钢的一侧,每个动力轮包括滚筒、带动滚筒滚动的齿轮、驱动齿轮转动的驱动装置(如电机);所述驱动装置位于滚筒内,并与磁感应充电模块无线连接,所述充电线圈模块通过磁感应充电模块为驱动装置供电;所述齿轮位于滚筒上方并与驱动装置连接,所述型钢上有与齿轮啮合的导向机构;行走时,所述驱动装置驱动齿轮转动,齿轮和型钢上的导向机构相互啮合,实现了动力轮带动检测机器人沿型钢长度方向行走的功能。
11.进一步的,所述永磁体位于动力轮一侧,通过支撑杆与机器人本体连接;所述磁感应充电模块和霍尔传感器位于两个动力轮之间。
12.进一步的,所述机器人本体底部设有用于对检测机器人支撑的支撑轮,支撑轮跟随动力轮行走,使检测机器人行走更加顺畅。
13.进一步的,所述检测系统包括检测模块和信号收发天线;所述检测模块通过信号收发天线与终端无线连接,所述检测模块用于采集现场设备运行的数据,并将数据通过信号收发天线与终端进行无线通讯和数据交换。
14.进一步的,所述检测模块包括拾音器、摄像头、测温传感器、补光灯等设备,所述信号收发天线用于采集现场环境声音,所述摄像头用于拍摄现场工况,所述测温传感器用于测试工况温度,所述补光灯用于对现场进行灯光补偿,提高了巡检效果。
15.进一步的,所述机器人本体背离型钢的一侧设有上盖,所述上盖通过支架与所述检测模块连接,所述信号收发天线设置在上盖上。
16.进一步的,所述终端包括工控机、电脑、手机等设备。
17.本实用新型与现有技术相比具有以下有益效果:
18.1、本实用新型直接以带式输送机的中间架型钢作为行走轨道,节省成本,合理利用空间,易于维护;
19.2、本实用新型采用永磁体设计提供检测机器人主体的吸附力,节省能源,稳定可靠;
20.3、本实用新型采用充电桩提供电能,节能环保,采用无线充电技术,简单高效;
21.4、本实用新型利用检测轨道上磁极的方式进行充电定位,精准定位。
22.本实用新型整体结构设计合理,安装方便,应用灵敏,环保节能,稳定性好。
附图说明
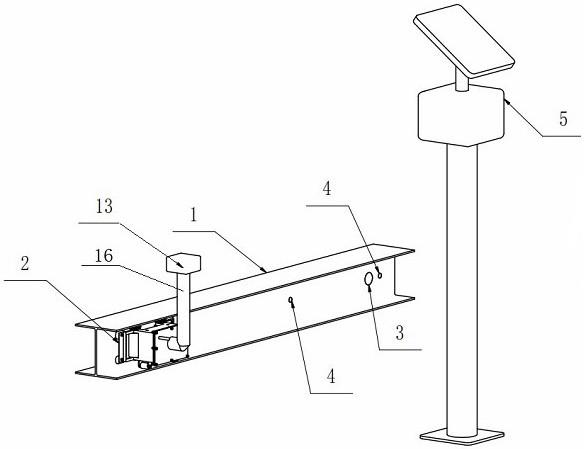
23.图1为本实用新型带式输送机巡检机器人、充电桩和型钢结构原理示意图;
24.图2为本实用新型带式输送机巡检机器人的主体结构原理示意图;
25.图3为本实用新型图2的后视图;
26.图4为本实用新型图2的右视图。
27.图中,1—型钢,2—检测机器人,3—充电线圈模块,4—磁铁,5—充电桩,6—动力轮,7—机器人本体,8—永磁体,9—支撑轮,10—上盖,11—磁感应充电模块,12—霍尔传感器,13—检测模块,14—信号收发天线,15—支撑杆,16—支架,601—滚筒,602—齿轮。
具体实施方式
28.为使本实用新型实施例的目的、技术方案和优点更加清楚,下面结合说明书附图,对本实用新型实施例中的技术方案进行清楚、完整地描述。
29.实施例1:
30.如图1和2所示,本实施例涉及的一种带式输送机巡检机器人,包括型钢1和以型钢1为行走轨道的检测机器人2;所述型钢1上设置充电线圈模块3;所述检测机器人2包括机器人本体7和设置在机器人本体7上的动力轮6、永磁体8、磁感应充电模块11和检测系统;所述动力轮6用于驱动检测机器人2沿型钢1行走;所述永磁体8用于提供检测机器人2与型钢1之间的吸附力;所述磁感应充电模块11与动力轮6无线连接,所述充电线圈模块3通过磁感应充电模块11为动力轮6供电;所述检测系统用于对带式输送机进行巡检,通过检测机器人2带动检测系统在型钢1上行走,从而对输送机进行巡检。
31.如图1所示,所述充电线圈模块3与充电桩5连接,充电桩5为充电线圈模块3供电,从而为检测机器人2提供电能;所述充电桩5为太阳能充电。
32.如图1和2所示,所述型钢1上还设有两个电磁铁4;两个电磁铁4同极性相对放置;所述机器人本体7上还设置有霍尔传感器12;当检测机器人2行走至两个电磁铁4之间时,霍尔传感器12有一个电压输出,电压大小与位移大小成正比,当检测机器人2行走至两个电磁铁4中间时,霍尔传感器12的磁感应强度为零,此时将两个电磁铁4的中间位置作为检测机器人2位移的零点,用于采集检测机器人2的位移情况。
33.如图1所示,两个所述电磁铁4所在的直线与输送机的输送方向平行,其中一个电磁铁4靠近型钢1的尾端,另一电磁铁4靠近型钢1的始端,所述充电线圈模块3位于两个电磁铁4之间,利用检测轨道上磁极的方式进行充电定位,精准定位。
34.如图2所示,所述动力轮6包括两个,均设置在机器人本体7靠近型钢1的一侧,每个动力轮6包括滚筒601、带动滚筒601滚动的齿轮602、驱动齿轮602转动的电机(图中未显示);所述电机位于滚筒601内,并与磁感应充电模块11无线连接,所述充电线圈模块3通过磁感应充电模块11为电机供电;所述齿轮602位于滚筒601上方并与电机连接,所述型钢1上有与齿轮602啮合的导向机构(图中未显示);行走时,所述电机驱动齿轮602转动,齿轮602和型钢1上的导向机构相啮合,实现了动力轮6带动检测机器人2沿型钢1长度方向行走的功能。
35.如图2所示,所述永磁体8位于动力轮6一侧,通过支撑杆15与机器人本体7连接;所述磁感应充电模块11和霍尔传感器12位于两个动力轮6之间。
36.如图3和4所示,所述机器人本体7底部有支撑轮9,支撑轮9跟随动力轮6行走。
37.如图2和4所示,所述机器人本体7背离型钢1的一侧设有上盖10,所述上盖10通过支架16与所述检测模块13连接,所述信号收发天线14设置在上盖10上;所述检测系统包括检测模块13和信号收发天线14;所述检测模块13通过信号收发天线14与电脑无线连接,所述检测模块13用于采集现场设备运行的数据,并将数据通过信号收发天线14与终端进行无线通讯和数据交换;所述检测模块13包括拾音器、摄像头、测温传感器、补光灯等设备(图中未显示),所述信号收发天线用于采集现场环境声音,所述摄像头用于拍摄现场工况,所述测温传感器用于测试工况温度,所述补光灯用于对现场进行灯光补偿,提高了巡检效果。
38.工作原理:
39.本实用新型通过永磁体8为检测机器人2与型钢1之间提供吸附力,使检测机器人2能够沿型钢1行走,行走时,充电线圈模块3通过磁感应充电模块11为动力轮6供电,通过动力轮6驱动检测机器人2,同时,支撑轮9跟随动力轮6行走,通过充电桩5与为充电线圈模块3供电;检测机器人2行走过程中,通过检测模块13对带式输送机进行巡检,将采集的数据通过信号收发天线14与终端进行无线通讯和数据交换。本实用新型不仅实现了利用输送机的中间架型钢1作为行走轨道进行巡检,合理利用了空间,而且利用检测轨道上磁极的方式进行充电定位,解决了供电不便的问题。
40.实施例2:
41.本实施例涉及的一种带式输送机巡检机器人,其结构与实施例1基本相同,其不同之处仅在于:所述充电桩5通过电缆与配电室连接,通过配电室进行供电。
42.上述具体实施方式仅是本实用新型的具体个案,本实用新型的专利保护范围包括但不限于上述具体实施方式的产品形态和式样,任何符合本实用新型权利要求书且任何所属技术领域的普通技术人员对其所做的适当变化或修饰,皆应落入本实用新型的专利保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。