1.本实用新型涉及物料摆盘技术领域,更具体地说,涉及一种兼容镜片与隔圈的无序摆盘机。
背景技术:
2.镜片与隔圈有正反面之分,镜片与隔圈在光学生产加工流程中需要摆盘时;现有的技术中,一般是人工区分镜片与隔圈的正反面并摆盘,此举需大量人工劳动力;或者是机器摆盘,但没有区分正反面功能,这就造成镜片与隔圈流入后续工艺时,还需人工再检查并分好正反面,也需要一定人工劳动力重复作业。
技术实现要素:
3.本实用新型要解决的技术问题在于,针对现有技术的上述缺陷,提供一种兼容镜片与隔圈的无序摆盘机及方法。
4.本实用新型解决其技术问题所采用的技术方案是:
5.构造一种兼容镜片与隔圈的无序摆盘机,其中,包括无序放置物料的无序盘、放置区分正反面后物料的规则盘、对物料进行正反面检测的下相机、移料组件、对所述无序盘中物料位置识别的上相机、带动上相机移动的移动组件和控制主机;所述控制主机接收所述下相机和所述上相机的数据,并控制所述移料组件运行;所述移料组件将无序盘中物料移动至所述下相机处检测,并将检测后物料放置在所述规则盘中相应区域;所述移料组件的移动区域位于所述上相机的移动区域的下方。
6.本实用新型所述的兼容镜片与隔圈的无序摆盘机,其中,所述移动组件包括带动所述上相机沿x轴、y轴移动的二轴横移组件。
7.本实用新型所述的兼容镜片与隔圈的无序摆盘机,其中,所述移料组件包括移料吸盘和带动其沿x轴、y轴以及z轴移动的摆盘三轴组件。
8.本实用新型所述的兼容镜片与隔圈的无序摆盘机,其中,所述下相机位于所述无序盘和所述规则盘之间。
9.本实用新型所述的兼容镜片与隔圈的无序摆盘机,其中,所述规则盘上划分有正面摆放区域和反面摆放区域。
10.本实用新型所述的兼容镜片与隔圈的无序摆盘机,其中,所述上相机根据设定程序由所述移动组件带动移动并拍照识别物料位置,并将识别后的物料位置发送至所述控制主机;所述控制主机根据所述物料位置控制所述移料组件移动到位并吸取物料后移动至所述下相机处检测。
11.本实用新型所述的兼容镜片与隔圈的无序摆盘机,其中,所述控制主机接收所述下相机的检测数据,并根据检测数据控制所述移料组件移动到所述规则盘中相应区域中进行摆放物料。
12.一种兼容镜片与隔圈的无序摆盘方法,根据上述的兼容镜片与隔圈的无序摆盘
机,其实现方法如下:
13.第一步:上相机根据设定程序由移动组件带动移动并拍照识别物料位置,并将识别后的物料位置发送至控制主机;
14.第二步:控制主机根据物料位置控制移料组件移动到位并吸取物料后移动至下相机处检测;
15.第三步:控制主机接收下相机的检测数据,根据检测数据控制移料组件移动到规则盘中相应区域中进行摆放物料。
16.本实用新型所述的兼容镜片与隔圈的无序摆盘方法,其中,所述第一步中,所述上相机识别物料位置成功后,继续移动进行下一物料位置的识别操作。
17.本实用新型所述的兼容镜片与隔圈的无序摆盘方法,其中,所述第二步中,所述控制主机根据所述移料组件的移动轨迹控制所述下相机的拍照时间。
18.本实用新型的有益效果在于:上相机根据设定程序由移动组件带动移动并拍照识别物料位置,并将识别后的物料位置发送至控制主机,控制主机根据物料位置控制移料组件移动到位并吸取物料后移动至下相机处检测,控制主机接收下相机的检测数据,根据检测数据控制移料组件移动到规则盘中相应区域中进行摆放物料;上相机一直在移动找镜片或隔圈位置,移料组件也一直在摆料,空间上呈现为上相机在上方运动,移料组件在下方运动,因此并不会有硬件干涉问题;把识别镜片或隔圈位置和摆盘的工作分开两套运动模组去完成,这种同时运动的方式提高了效率,摆盘并识别镜片或隔圈正反面的效率能达到3s/个,并且此设备兼容镜片与隔圈摆盘,为客户节省了成本;在镜片和隔圈生产流动过程中起到了很大的作用,节省了人工劳动力并提高了效率。
附图说明
19.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将结合附图及实施例对本实用新型作进一步说明,下面描述中的附图仅仅是本实用新型的部分实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他附图:
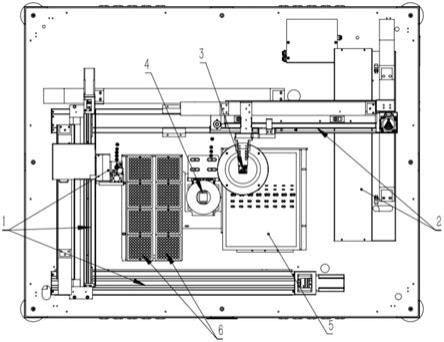
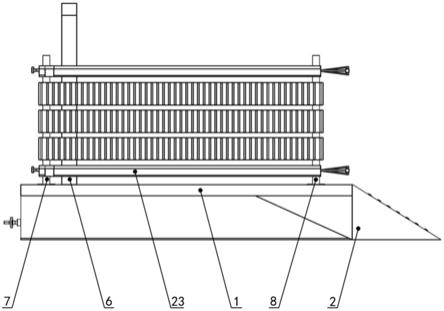
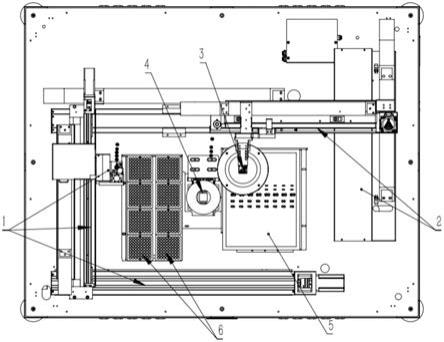
20.图1是本实用新型较佳实施例的兼容镜片与隔圈的无序摆盘机俯视图;
21.图2是本实用新型较佳实施例的兼容镜片与隔圈的无序摆盘方法流程图。
具体实施方式
22.为了使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合本实用新型实施例中的技术方案进行清楚、完整的描述,显然,所描述的实施例是本实用新型的部分实施例,而不是全部实施例。基于本实用新型的实施例,本领域普通技术人员在没有付出创造性劳动的前提下所获得的所有其他实施例,都属于本实用新型的保护范围。
23.本实用新型较佳实施例的兼容镜片与隔圈的无序摆盘机,如图1所示,包括无序放置物料的无序盘5、放置区分正反面后物料的规则盘6、对物料进行正反面检测的下相机4、移料组件1、对无序盘中物料位置识别的上相机3、带动上相机移动的移动组件2和控制主机;控制主机接收下相机4和上相机3的数据,并控制移料组件1运行;移料组件1将无序盘5中物料移动至下相机4处检测,并将检测后物料放置在规则盘6中相应区域;移料组件1的移
动区域位于上相机3的移动区域的下方;
24.上相机3根据设定程序由移动组件2带动移动并拍照识别物料位置,并将识别后的物料位置发送至控制主机,控制主机根据物料位置控制移料组件1移动到位并吸取物料后移动至下相机4处检测,控制主机接收下相机4的检测数据,根据检测数据控制移料组件移动到规则盘中相应区域中进行摆放物料;上相机3一直在移动找镜片或隔圈位置,移料组件1也一直在摆料,空间上呈现为上相机3在上方运动,移料组件1在下方运动,因此并不会有硬件干涉问题;
25.把识别镜片或隔圈位置和摆盘的工作分开两套运动模组去完成,这种同时运动的方式提高了效率,摆盘并识别镜片或隔圈正反面的效率能达到3s/个,并且此设备兼容镜片与隔圈摆盘,为客户节省了成本;在镜片和隔圈生产流动过程中起到了很大的作用,节省了人工劳动力并提高了效率。
26.优选的,移动组件2包括带动上相机沿x轴、y轴移动的二轴横移组件;当然,可以理解的,根据实际需要可以更改为其他方向的横移组件,基于该种方式简单替换均属于本技术保护范畴。
27.优选的,移料组件1包括移料吸盘和带动其沿x轴、y轴以及z轴移动的摆盘三轴组件;当然,可以理解的,根据实际需要移料吸盘可以更换为现有的其他方式结构,例如机械抓手等,基于该种方式简单替换均属于本技术保护范畴。
28.优选的,下相机4位于无序盘5和规则盘6之间;结构布局合理且紧凑,减少移料组件1移料行程,提高摆盘效率。
29.优选的,规则盘6上划分有正面摆放区域和反面摆放区域;便于进行区分摆盘;一种较佳的方式可以是,左边一列设置为正面物料,右边一列设置有反面物料,当然还可以有其他形式。
30.优选的,上相机3根据设定程序由移动组件带动移动并拍照识别物料位置,并将识别后的物料位置发送至控制主机;控制主机根据物料位置控制移料组件移动到位并吸取物料后移动至下相机处检测;便于进行连续性的无序盘中物料识别动作,保障识别效率。
31.优选的,控制主机接收下相机的检测数据,并根据检测数据控制移料组件移动到规则盘中相应区域中进行摆放物料;便于进行连续性的检测以及摆盘动作,保障检测摆盘效率。
32.一种兼容镜片与隔圈的无序摆盘方法,根据上述的兼容镜片与隔圈的无序摆盘机,如图2所示,其实现方法如下:
33.s01:上相机根据设定程序由移动组件带动移动并拍照识别物料位置,并将识别后的物料位置发送至控制主机;
34.s02:控制主机根据物料位置控制移料组件移动到位并吸取物料后移动至下相机处检测;
35.s03:控制主机接收下相机的检测数据,根据检测数据控制移料组件移动到规则盘中相应区域中进行摆放物料;
36.上相机一直在移动找镜片或隔圈位置,移料组件也一直在摆料,空间上呈现为上相机在上方运动,移料组件在下方运动,因此并不会有硬件干涉问题;把识别镜片或隔圈位置和摆盘的工作分开两套运动模组去完成,这种同时运动的方式提高了效率,摆盘并识别
镜片或隔圈正反面的效率能达到3s/个,并且此设备兼容镜片与隔圈摆盘,为客户节省了成本;在镜片和隔圈生产流动过程中起到了很大的作用,节省了人工劳动力并提高了效率。
37.优选的,第一步中,上相机识别物料位置成功后,继续移动进行下一物料位置的识别操作;保障物料识别效率。
38.优选的,第二步中,控制主机根据移料组件的移动轨迹控制下相机的拍照时间;智能性好,能够减少拍照时停留等等间隔时间,提高检测效率。
39.应当理解的是,对本领域普通技术人员来说,可以根据上述说明加以改进或变换,而所有这些改进和变换都应属于本实用新型所附权利要求的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。