1.本实用新型涉及数控机床技术领域,主要涉及多角度转换式数控机床。
背景技术:
2.数控机床是数字控制机床(computer numerical control machine tools)的简称,是一种装有程序控制系统的自动化机床。该控制系统能够逻辑地处理具有控制编码或其他符号指令规定的程序,并将其译码,用代码化的数字表示,通过信息载体输入数控装置。经运算处理由数控装置发出各种控制信号,控制机床的动作,按图纸要求的形状和尺寸,自动地将零件加工出来。
3.现有的数控机床例如专利号为cn201621018429.4,一种能够改变操作位置的数控机床,涉及机床领域。该能够改变操作位置的数控机床,包括操作台,所述操作台的顶部从左至右依次固定连接有机体和控制箱,所述控制箱的左侧与机体的右侧固定连接,所述控制箱的正表面从上至下依次固定安装有显示屏和输入按钮,所述机体的左侧固定连接有第一电机,所述第一电机的输出端贯穿机体且延伸至机体的内部与夹紧盘固定连接,机体内壁的底部固定连接有固定座,固定座的顶部活动连接有移动座。该能够改变操作位置的数控机床,操作简单,使用者可多角度调节机体操作的位置,可以让使用者不需要走动到数控机床的操作位置即可对数控机床进行操作,降低了劳动者付出的劳动力。
4.但是,由于现有的数控机床在夹具夹持完后,通过铣头后端的主轴进行横向和纵向的移动,来调节铣的位置,但是,由于铣头位置的调节只能对工件单侧进行加工,同时只能进行单轴向的加工,进而造成工件不能多角度加工的技术问题。
技术实现要素:
5.本实用新型主要提供了多角度转换式数控机床,用以解决上述背景技术中提出的由于现有的数控机床在夹具夹持完后,通过铣头后端的主轴进行横向和纵向的移动,来调节铣的位置,但是,由于铣头位置的调节只能对工件单侧进行加工,同时只能进行单轴向的加工,进而造成工件不能多角度加工的技术问题。
6.本实用新型解决上述技术问题采用的技术方案为:多角度转换式数控机床,包括机床本体和铣头,所述机床本体外侧轨道连接两个移门,所述机床本体内腔一侧设有铣头;
7.所述机床本体底部设有第一滑槽,所述第一滑槽内设有浮动组件,所述浮动组件上端可拆卸连接第一驱动电机,所述第一驱动电机驱动轴连接第一支撑板,所述第一支撑板上方对称设有两个第二滑槽,两个所述第二滑槽内设有移动式夹持结构,且所述第一支撑板两端、所述浮动组件上端设有限位结构,所述限位结构挤压连接所述第一支撑板。
8.进一步的,所述浮动组件包括两个第二支撑板,两个所述第二支撑板对称设置在所述第一滑槽内部,两个所述第二支撑板上可拆卸连接四个第一气缸,所述第一滑槽一端设有第一气泵,所述第一气泵管道连接四个所述第一气缸,四个所述第一气缸上端均设有第一连接球,两个所述第二支撑板之间、所述第一滑内中部对称设有两个第一连接环,两个
所述第一连接环中部套和连接第一转动杆,所述第一转动上可拆卸连接第二支撑板,所述第二支撑板下方对称设有四个第三滑槽,四个所述第一连接球滑动连接于四个所述第三滑槽内。
9.进一步的,所述移动式夹持结构包括第二驱动电机,所述第二驱动电机驱动轴连接第一丝杆,所述第一丝杆转动连接第一连接板,所述第一连接板一侧设有第四滑槽,所述第四滑槽内设有横向移动组件,所述横向移动组件一侧可拆卸连接挤压板。
10.进一步的,所述横向移动组件包括第二丝杆和第一滑杆,所述第二丝杆和所述第一滑杆均轴承连接于所述第四滑槽内,且所述第四滑槽一端设有第三驱动电机,所述第三驱动电机驱动轴连接所述第二丝杆,所述第二丝杆和所述第一滑杆均转动连接第二连接板,所述第二连接板一侧可拆卸连接所述挤压板。
11.进一步的,所述挤压板一端可拆卸连接多个第二气缸,所述第一连接板后端设有第二气泵,所述第二气泵管道连接多个所述气缸,且所述挤压板一端设有橡胶板,多个所述第二气缸贯穿所述橡胶板。
12.进一步的,所述限位结构包括第四驱动电机,所述第二支撑板上对称设有两个第五滑槽,所述第四驱动电机可拆卸连接于所述第五滑槽内,所述第四驱动电机驱动轴连接第三丝杆,所述第三丝杆转动连接第三连接板,所述第三连接板上方设有工字条,所述第一支撑板两端对称设有四个缺口,两个所述工字条分别滑动连接四个所述缺口。
13.与现有技术相比,本实用新型的有益效果为:
14.本实用新型首先通过设置有浮动组件,利用浮动组件来实现第一支撑板可以进行左右的摆动;
15.然后,在通过第一驱动电机转动电动第一支撑板可以进行对应的转动,在通过移动式夹持结构来实现对工件的夹紧,最后到达指定的位置后,在通过限位结构来实现精准定位。
附图说明
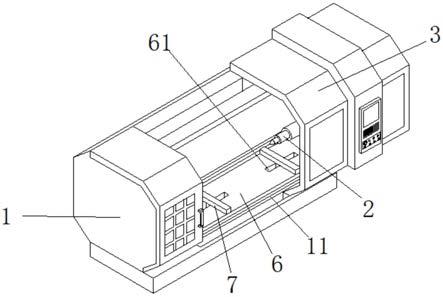
16.图1是本实用新型的结构示意图;
17.图2是本实用新型的第一支撑板连接示意图;
18.图3是本实用新型的浮动组件结构示意图;
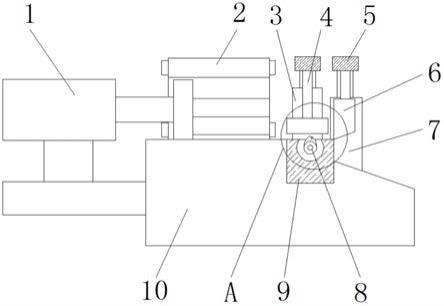
19.图4是本实用新型的移动式夹持结构示意图;
20.图5是本实用新型的限位结构示意图。
21.图中:1、机床本体;11、第一滑槽;2、铣头;3、移门;4、浮动组件;41、第二支撑板;42、第一气缸;43、第一气泵;44、第一连接球;45、第一连接环;46、第一转动杆;47、第三支撑板;471、第三滑槽;472、第五滑槽;5、第一驱动电机;6、第一支撑板;61、第二滑槽;62、缺口;7、移动式夹持结构;71、第二驱动电机;72、第一丝杆;73、第一连接板;74、第四滑槽;75、横向移动组件;751、第二丝杆;752、第一滑杆;753、第三驱动电机;754、第二连接板;76、挤压板;761、橡胶板;77、第二气缸;8、限位结构;81、第四驱动电机;82、第三丝杆;83、第三连接板;84、工字条。
具体实施方式
22.为了便于理解本实用新型,下面将参照相关附图对本实用新型进行更加全面的描述,附图中给出了本实用新型的若干实施例,但是本实用新型可以通过不同的形式来实现,并不限于文本所描述的实施例,相反的,提供这些实施例是为了使对本实用新型公开的内容更加透彻全面。
23.需要说明的是,当元件被称为“固设于”另一个元件,它可以直接在另一个元件上也可以存在居中的元件,当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件,本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
24.除非另有定义,本文所使用的所有的技术和科学术语与属于本实用新型的技术领域的技术人员通常连接的含义相同,本文中在本实用新型的说明书中所使用的术语知识为了描述具体的实施例的目的,不是旨在于限制本实用新型,本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
25.实施例,请着重参照附图1
‑
5,多角度转换式数控机床,包括机床本体1和铣头2,所述机床本体1外侧轨道连接两个移门3,所述机床本体1内腔一侧设有铣头2,所述洗头2可拆卸连接所述机床本体1内的主轴;
26.所述机床本体1底部设有第一滑槽11,所述第一滑槽11内设有浮动组件4,所述浮动组件4上端可拆卸连接第一驱动电机5,所述第一驱动电机5驱动轴连接第一支撑板6,所述第一支撑板6上方对称设有两个第二滑槽61,两个所述第二滑槽61内设有移动式夹持结构7,且所述第一支撑板6两端、所述浮动组件4上端设有限位结构8,所述限位结构8挤压连接所述第一支撑板6。
27.请着重参照附图2
‑
3,所述浮动组件4包括两个第二支撑板41,两个所述第二支撑板41对称设置在所述第一滑槽11内部,两个所述第二支撑板41上可拆卸连接四个第一气缸42,所述第一滑槽11一端设有第一气泵43,所述第一气泵43管道连接四个所述第一气缸42,四个所述第一气缸42上端均设有第一连接球44,两个所述第二支撑板41之间、所述第一滑槽11内中部对称设有两个第一连接环45,两个所述第一连接环45中部套和连接第一转动杆46,所述第一转动杆46上可拆卸连接第三支撑板47,所述第三支撑板47下方对称设有四个第三滑槽471,四个所述第一连接球44滑动连接于四个所述第三滑槽471内。
28.请着重参照附图2和4,所述移动式夹持结构7包括第二驱动电机71,所述第二驱动电机71驱动轴连接第一丝杆72,所述第一丝杆72转动连接第一连接板73,所述第一连接板73一侧设有第四滑槽74,所述第四滑槽74内设有横向移动组件75,所述横向移动组件75一侧可拆卸连接挤压板76,所述横向移动组件75包括第二丝杆751和第一滑杆752,所述第二丝杆751和所述第一滑杆752均轴承连接于所述第四滑槽74内,且所述第四滑槽74一端设有第三驱动电机753,所述第三驱动电机753驱动轴连接所述第二丝杆751,所述第二丝杆751和所述第一滑杆752均转动连接第二连接板754,所述第二连接板754一侧可拆卸连接所述挤压板76,所述挤压板76一端可拆卸连接多个第二气缸77,所述第一连接板73后端设有第二气泵78,所述第二气泵78管道连接多个所述第二气缸77,且所述挤压板76一端设有橡胶板761,多个所述第二气缸77贯穿所述橡胶板761。
29.请着重参照附图5,所述限位结构8包括第四驱动电机81,所述第三支撑板47上对
称设有两个第五滑槽472,所述第四驱动电机81可拆卸连接于所述第五滑槽472内,所述第四驱动电机81驱动轴连接第三丝杆82,所述第三丝杆82转动连接第三连接板83,所述第三连接板83上方设有工字条84,所述第一支撑板6两端对称设有四个缺口62,两个所述工字条84分别滑动连接四个所述缺口62。
30.操作原理:先通过第一气泵进行供气,利用管道上的空气阀来实现多个第一气缸到达指定的位置,并且利用第一连接球在四个第三滑槽内可以进行对应的滑动,从而来实现第二支撑板位置的调节;
31.然后,在通过第一驱动电机转动带动第一支撑板进行对应的转动,当到达指定的位置后在通过第二驱动电机转动来实现纵向位置的调节,然后通过第三驱动电机转动来实现横向位置的调节从而来实现对工件的挤压定位,局部异形的地方,在通过第二气泵带动第二气缸的伸长,从而来实现对应的定位。
32.上述结合附图对本实用新型进行了示例性描述,显然本实用新型具体实现并不受上述方式的限制,只要采用了本实用新型的方法构思和技术方案进行的这种非实质改进,或未经改进将本实用新型的构思和技术方案直接应用于其他场合的,均在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。