1.本实用新型涉及一种堆垛机安全控制系统,属于堆垛机技术领域。
背景技术:
2.堆垛机是一种特殊的货物起重机,依托于自动化立体仓库而存在。作为物流中存取货物的载体,堆垛机的主要工作是在立体仓库高层货架之间的巷道内携带货物来回穿梭运行,将出入口的货物存入指定货位或取出指定货位的货物运往出入口,它在整个物流过程中进行着货物入库、出库和盘库等作业任务,是集传感器技术、可编程控制技术及信息处理技术于一体的自动化设备,已成为自动化物料仓储中物料运输和柔性生产组织系统中的关键设备。
3.现有的堆垛机的控制系统,多数优先考虑功能的实现,而往往对安全性不够重视。尽管设置了检测危险的功能部件,但是缺乏整体和详细的考虑。因此需要设计一种堆垛机安全控制系统及其安全电路以保证系统的安全运作,极大限度保证人身财产安全。
技术实现要素:
4.本实用新型所要解决的技术问题是克服现有技术的缺陷,提供一种堆垛机安全控制系统,能够实时监测堆垛机的位置和货叉的位置,形成一个反馈
‑
控制的闭环监控。
5.为达到上述目的,本实用新型提供一种堆垛机安全控制系统,包括堆垛机、升降平台、货叉和用于驱动堆垛机行走升降的驱动单元,升降平台安装在堆垛机上,货叉安装在升降平台上,驱动单元包括堆垛机控制器、行走驱动单元、升降驱动单元、行走电机抱闸和升降电机抱闸,堆垛机控制器、行走驱动单元、升降驱动单元、行走电机抱闸和升降电机抱闸均安装在堆垛机上,堆垛机控制器电连接行走驱动单元、升降驱动单元、行走电机抱闸和升降电机抱闸;还包括安全电路防护机构和软件逻辑控制防护机构,所述安全电路防护机构包括急停开关、安全继电器和用于限制堆垛机运动极限的限位模块,所述急停开关、所述限位模块与所述安全继电器电连接,所述安全继电器与所述驱动单元电连接,限位模块电连接或无线通信连接堆垛机控制器;
6.所述软件逻辑控制防护机构包括减速模块,减速模块与堆垛机控制器电连接,减速模块固定安装在堆垛机上。
7.优先地,减速模块包括行走减速传感器和升降减速传感器,行走减速传感器固定设置在堆垛机行走路线的极限位置周边,升降减速传感器固定设置在堆垛机升降的极限位置周边,行走减速传感器和升降减速传感器均与堆垛机控制器通信连接。
8.优先地,所述限位模块包括行走限位传感器和行走继电器k1,所述行走限位传感器的输出端电连接所述行走继电器k1的线圈触点,急停开关和行走继电器k1的常开触点串联设置在所述安全继电器的第一控制端口u1与所述第二控制端口u2之间,所述行走限位传感器和行走继电器k1固定设置在堆垛机上,行走限位传感器电连接堆垛机控制器。
9.优先地,包括用于监测堆垛机位置的测距模块,测距模块包括行走测距仪器和升
降测距仪器,所述行走测距仪器安装在堆垛机的基座上,所述升降测距仪器安装在升降平台上,行走测距仪器和升降测距仪器均与堆垛机控制器通过总线方式连接。
10.优先地,包括用于监测货物大小的载货台检测模块,载货台检测模块包括用于检测货叉上货物高度的货物超高检测光电传感器、用于检测货物上货物宽度的货物超宽检测光电传感器和用于检测货叉上有无货物的货物有无检测光电传感器,所述货物超高检测光电传感器、货物超宽检测光电传感器和货物有无检测光电传感器均与堆垛机控制器电连接,货物超高检测光电传感器、货物超宽检测光电传感器和货物有无检测光电传感器均固定安装在堆垛机上。
11.优先地,包括用于监测货叉是否运行到原点和极限位置的货叉检测模块,货叉检测模块包括断路器km3、断路器km6、用于检测货叉是否到达原点的货叉原点传感器、用于检测货叉是否到达极限位置的货叉极限传感器、货叉原点继电器和货叉极限继电器,货叉原点传感器的输出端连接到货叉原点继电器的线圈触点,货叉极限传感器的输出端连接到货叉极限继电器的线圈触点,所述货叉原点传感器和所述货叉极限传感器均与堆垛机控制器电连接,所述货叉原点传感器和所述货叉极限传感器固定设置在堆垛机上,行走驱动单元和行走电机抱闸之间串联断路器km3,升降驱动单元和升降电机抱闸之间串联断路器km6,所述货叉原点继电器的常开触点和所述货叉极限继电器的常开触点串联设置在断路器km3的线圈触点和断路器km6的线圈触点之间。
12.优先地,包括用于监测货叉上货物松动坠落的升降检测模块,所述升降检测模块包括用于检测货叉上货物有无松动的松动检测传感器、用于检测货叉上货物有无坠落的坠落检测传感器、松动检测继电器和坠落检测继电器,所述松动检测传感器的输出端电连接松动检测继电器的线圈触点,坠落检测传感器的输出端电连接所述坠落检测继电器的线圈触点,所述急停开关、所述松动检测继电器的常开触点和所述坠落检测继电器的常开触点串联后设置于所述安全继电器的第一控制端口u1与所述第二控制端口u2之间,松动检测传感器和坠落检测传感器均电连接堆垛机控制器,松动检测传感器、坠落检测传感器、松动检测继电器和坠落检测继电器固定安装在堆垛机上。
13.优先地,包括用于检测货叉是否升降到极限位置的升降限位模块,所述升降限位模块包括升降限位传感器和升降继电器k2,所述升降限位传感器的输出端电连接所述升降继电器k2的线圈触点,升降限位传感器和升降继电器k2固定安装在堆垛机上,所述急停开关所述升降继电器k2的常开触点串联后设置于安全继电器的所述第一控制端口u1与所述第二控制端口u2之间,升降限位传感器电连接堆垛机控制器。
14.优先地,包括用于监测储位有无货物的储位检测模块,储位检测模块包括探测货物光电传感器,所述探测货物光电传感器与堆垛机控制器电连接,所述探测货物光电传感器固定设置在堆垛机上。
15.优先地,所述安全电路防护包括第一开关断路器km1和第二开关断路器km2,堆垛机的电源串联第一开关断路器km1的常开触点和第二开关断路器km2的常开触点后与行走驱动单元电连接,所述第一开关断路器km1的线圈触点、第二开关断路器km2的线圈触点均与所述安全继电器的常开触点电连接;所述安全电路防护还包括第四开关断路器km4和第五开关断路器km5,堆垛机的电源串联第四开关断路器km4的常开触点和第五开关断路器km5的常开触点后电连接升降驱动单元,所述第四开关断路器km4的线圈触点和第五开关断
路器km5的线圈触点均与所述安全继电器的常开触点电连接。
16.本实用新型所达到的有益效果:
17.本实用新型提供了一种堆垛机安全控制系统,该系统采用安全电路防护和软件逻辑控制防护,综合考虑了堆垛机各种可能出现的异常并采取了防护措施,实现了堆垛机的全方位安全检测与防护,而且运行平稳,抗干扰能力强,安全可靠,控制便捷;
18.所述测距模块实时测量堆垛机在行走方向的位置和升降平台的位置,以实时监控堆垛机运动是否超出范围。所述减速模块用于检测行走结构和升降机构是否运动到特定区域内,以进行强制减速。所述载货台检测模块和储位检测模块用于判断载货台和储位的载货情况,以判断是否可以安全地进行货物存取。所述货叉检测模块中的货叉检测光电用以检测货叉是否运动到达极限位置;
19.测距仪器与堆垛机控制器通过总线方式连接,实时监控堆垛机位置,当堆垛机到达设定位置时停止堆垛机运行。
20.当行走减速传感器或升降减速传感器感应到信号时,堆垛机控制器对堆垛机进行强制减速处理,以避免堆垛机到达极限位置立即停止时由于惯性过大导致倾斜歪倒危险发生。
21.所述载货台检测模块给堆垛机提供逻辑判断依据,当货物超高检测光电传感器检测到货物超高时停止堆垛机存货,当货物超宽检测光电传感器检测到货物超宽时停止堆垛机存货,当检测到载货台有货物时堆垛机不能执行取货动作,当检测到载货台无货物时堆垛机不能执行存货动作,否则停止堆垛机动作。
22.所述储位检测模块给堆垛机提供逻辑判断依据,当检测到储位有货物时堆垛机不能执行存货动作,当检测到储位无货物时堆垛机不能开始执行取货动作,否则停止堆垛机动作。
23.所述货叉检测模块中,当货叉极限传感器检测到货叉到达货叉极限的最高点或货叉极限的最低点时停止堆垛机运行,当货叉原点传感器检测到货叉到达原点位置时堆垛机控制器通知堆垛机进行下一部动作。
24.限位模块、升降限位模块、升降检测模块、货叉检测模块以及急停开关的信号也同时连接到堆垛机控制器,当所述各模块检测到信号时,除了安全电路防护发挥作用以外,软件逻辑控制也应立即停止堆垛机运行。因此安全电路防护和软件逻辑控制防护也形成了双重安全防护,最大限度避免安全控制系统异常失效。
附图说明
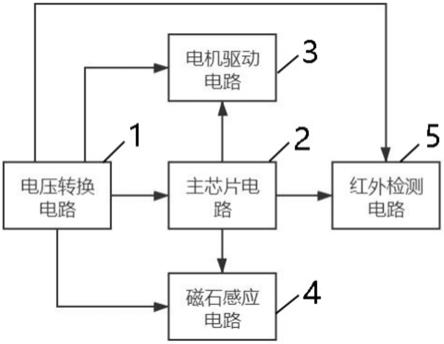
25.图1为本实用新型的原理框图;
26.图2为本实用新型安全电路防护的原理框图;
27.图3为本实用新型的流程图;
28.图4为本实用新型远程停止连接的原理框图。
29.附图标记含义,10
‑
堆垛机控制器;20
‑
安全继电器;30
‑
驱动单元;31
‑
行走单元;32
‑
升降驱动单元;40
‑
通信模块;50
‑
货叉检测模块;51
‑
货叉检测传感器;60
‑
急停开关;70
‑
限位模块;71
‑
行走限位传感器;81
‑
升降限位传感器;91
‑
升降检测传感器;80
‑
升降限位模块;90
‑
升降检测模块;100
‑
测距模块;110
‑
减速模块;120
‑
载货台检测模块;130
‑
储位检测
模块。
具体实施方式
30.以下实施例仅用于更加清楚地说明本实用新型的技术方案,而不能以此来限制本实用新型的保护范围。
31.需要说明,若本实用新型实施例中有方向性指示(诸如上、下、左、右、前、后......),则其仅用于解释在某一特定姿态下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
32.另外,若在本实用新型中涉及“第一”、“第二”等的描述,则其仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。另外,各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本实用新型要求的保护范围之内。
33.货物超高检测光电传感器、货物超宽检测光电传感器、货物有无检测光电传感器、测货物光电传感器是光电传感器,垛机控制器10可采用单片机或plc主控芯片,安全继电器20、通信模块40、急停开关60、行走电机抱闸、升降电机抱闸、急停开关、安全继电器、行走减速传感器、升降减速传感器、行走限位传感器、行走继电器k1、行走测距仪器、升降测距仪器、货物超高检测光电传感器、用于检测货物上货物宽度的货物超宽检测光电传感器、用于检测货叉上有无货物的货物有无检测光电传感器、断路器km3、断路器km6、用于检测货叉是否到达原点的货叉原点传感器、用于检测货叉是否到达极限位置的货叉极限传感器、货叉原点继电器和货叉极限继电器、用于检测货叉上货物有无松动的松动检测传感器、用于检测货叉上货物有无坠落的坠落检测传感器、松动检测继电器、坠落检测继电器、升降限位传感器、升降继电器k2、探测货物光电传感器、第一开关断路器km1、第二开关断路器km2、第四开关断路器km4、第五开关断路器km5、堆垛机、堆垛机的升降平台在现有技术中可采用的型号很多,本领域技术人员可根据实际需求选用合适的型号,本实施例不再一一举例。
34.所述行走限位传感器的输出端、行走继电器k1的线圈触点、堆垛机的电源和堆垛机控制器的输入端构成一个闭环电路。货叉极限传感器的输出端、货叉极限继电器的线圈触点、堆垛机的电源和堆垛机控制器的输入端构成一个闭环电路,货叉原点传感器的输出端、货叉原点继电器的线圈触点、堆垛机的电源和堆垛机控制器的输入端构成一个闭环电路
35.堆垛机包括电源及驱动控制器,所述安全继电器用于连接堆垛机的电源及驱动控制器,当所述限位模块检测到行走机构或升降机构运动到达极限,或者升降检测模块检测到升降机构有松动、坠落等风险和异常时,安全继电器断开堆垛机的电源与驱动控制器的连接。所述货叉检测模块与行走电机抱闸和升降电机抱闸相连,当货叉在安全位置时,才允许行走电机抱闸和升降电机抱闸松开。
36.所述安全继电器用于当所述限位模块、升降限位模块、升降检测模块检测到风险或异常时,控制第一开关接触器km1和第二开关接触器km2断开,第一开关接触器km1及第二开关接触器km2串联形成双重安全防护,最大限度地保证电路能够及时有效地断开。
37.所述软件逻辑控制防护包括堆垛机控制器、通信模块、测距模块、减速模块、载货台检测模块、储位检测模块和货叉检测模块。所述通信模块、测距模块、减速模块、载货台检测模块、储位检测模块和货叉检测模块均与所述堆垛机控制器通讯连接或电连接,所述堆垛机控制器根据信号进行逻辑判断,并对驱动单元发出减速或停止指令。所述通信模块用以与远程控制器进行心跳信号的交互,以实现远程停止。所述测距模块实时测量堆垛机在行走方向的位置和升降平台的位置,以实时监控堆垛机运动是否超出范围。所述减速模块用于检测行走结构和升降机构是否运动到特定区域内,以进行强制减速。所述载货台检测模块和储位检测模块用于判断载货台和储位的载货情况,以判断是否可以安全地进行货物存取。所述货叉检测模块中的货叉检测光电用以检测货叉是否运动到达极限。
38.所述通信模块包括远程通讯装置,远程通讯装置与堆垛机控制器通过总线方式连接,堆垛机控制器通过远程通讯装置与现有技术中的上位机远程控制端通讯,并实时交互心跳信号,当心跳信号断开时停止堆垛机运行,以此实现堆垛机的远程停止。
39.测距模块包括行走测距仪器和升降测距仪器,测距仪器与堆垛机控制器通过总线方式连接,实时监控堆垛机位置,当堆垛机到达设定位置时停止堆垛机运行。
40.当行走减速传感器或升降减速传感器感应到信号时,堆垛机控制器对堆垛机进行强制减速处理,以避免堆垛机到达极限位置立即停止时由于惯性过大导致倾斜歪倒危险发生。
41.所述载货台检测模块给堆垛机提供逻辑判断依据,当货物超高检测光电传感器检测到货物超高时停止堆垛机存货,当货物超宽检测光电传感器检测到货物超宽时停止堆垛机存货,当检测到载货台有货物时堆垛机不能执行取货动作,当检测到载货台无货物时堆垛机不能执行存货动作,否则停止堆垛机动作。
42.所述储位检测模块给堆垛机提供逻辑判断依据,当检测到储位有货物时堆垛机不能执行存货动作,当检测到储位无货物时堆垛机不能开始执行取货动作,否则停止堆垛机动作。
43.所述货叉检测模块中,当货叉极限传感器检测到货叉到达货叉极限的最高点或货叉极限的最低点时停止堆垛机运行,当货叉原点传感器检测到货叉到达原点位置时堆垛机控制器通知堆垛机进行下一部动作。
44.限位模块、升降限位模块、升降检测模块、货叉检测模块以及急停开关的信号也同时连接到堆垛机控制器,当所述各模块检测到信号时,除了安全电路防护发挥作用以外,软件逻辑控制也应立即停止堆垛机运行。因此安全电路防护和软件逻辑控制防护也形成了双重安全防护,最大限度避免安全控制系统异常失效。
45.请参阅图2,更详细的,所述安全电路防护中,当第一控制端口u1和第一控制端口u2断开时,安全继电器20控制开关接触器km1、开关接触器km2、开关接触器km4和开关接触器km5断开,从而断开行走驱动单元31的供电和升降驱动单元32的供电。在安全继电器20的第一控制端口u1和第一控制端口u2之间串联设置有继电器k1、继电器k2、继电器k3和急停开关60。继电器k1线圈触点与行走限位传感器71输出端电连接,继电器k2线圈触点与升降限位传感器81输出端电连接,和继电器k3线圈触点与升降检测传感器91输出端电连接。当所述行走限位传感器71、升降限位传感器81或升降检测传感器91检测到信号时,第一控制端口u1和第一控制端口u2断开以实现安全防护功能。货叉检测传感器51输出端、断路器km3
和断路器km6串联电连接,断路器km3串联设置于行走驱动单元31和行走电机抱闸之间,km6串联设置在升降驱动单元32与升降电机抱闸之间,当货叉检测传感器51未检测到货叉的信号时,不允许驱动单元松开升降电机抱闸,以起到限制行走机构和升降机构不安全运动的作用。
46.需要说明的是,于本实施例中,涉及安全功能的部件均采用双通道冗余设计,例如,行走驱动单元与电源之间的断路器的数量为2个,分别为断路器km1和断路器km2,共同控制线路间堆垛机的电源的通断。涉及到安全功能的器件皆采用安全型电气元件。检测元件和最终执行元件在系统故障时是失电状态,从而即使某一通道的安全功能器件出现故障,并不会影响整个安全控制系统的安全功能的正常运行。
47.请参阅图3,所述软件逻辑控制防护的程序逻辑如下:
48.步骤1:堆垛机开始运行。
49.步骤2:测距模块实时测量行走结构和升降机构的位置。
50.步骤3:实时判断行走位置和升降位置是否超过设定的位置限制,超出限制则堆垛机立即停止运行。
51.步骤4:实时监控行走结构和升降机构的减速传感器,传感器有信号则堆垛机立即减速至设定的安全速度。
52.步骤5:实时监控载货台的超限检测传感器的信号,超出限制则堆垛机立即停止运行。
53.步骤6:实时监控载货台的货物有无传感器的信号,并在货叉执行存货取货物的动作之前再进一步判断:载货台无货物时开始存货,或者载货台有货物时开始取货,否则堆垛机立即停止运行。
54.步骤7:实时监控储位的货物探测传感器的信号,并在货叉执行存取货物的动作之前再进一步判断:储位无货物时开始取货,或者储位有货物时开始存货,则堆垛机立即停止运行。
55.需要说明的是,软件逻辑控制防护还考虑了所述安全电路防护中的限位模块70、升降限位模块80、升降检测模块90,当安全电路检测到危险时,除安全电路防护起作用之外,还将检测信号传输给堆垛机控制器10,堆垛机控制器10在接收到安全电路的信号之后,立即停止堆垛机运行。这样可以在最大限度地避免安全电路失效而导致的事故,保证整个安全控制系统是有效的。
56.请参阅图4,所述软件逻辑控制防护还包括远程停止功能,远程停止功能利用通信模块来实现。例如通信模块可采用sick的isd400光通讯仪器,isd400光通讯的一端通过屏蔽网线与堆垛机控制器连接,另一端通过屏蔽网线与上位机远程控制端连接。而远程停止开关与上位机远程控制端电连接。堆垛机控制器与上位机远程控制端采用通信协议进行信息交互,其中设置一个心跳信号以毫秒级的时间周期进行交互,当远程停止开关按下时,上位机远程控制端停止心跳信号,而堆垛机未收到心跳信号时,则立即停止运行。
57.行走机构指驱动堆垛机整体在轨道上行走的结构,升降机构指堆垛机上的升降平台。因为极限传感器只有到了极限位置时才起保护作用,因此还需要设置测量升降机构的测距模块,测距模块是为堆垛机控制器提供位置信息,以进行运动控制和实时保护。
58.本实施例中,松动检测传感器和坠落检测传感器为omron品牌的d4mc行程开关,行
走减速传感器采用schmersal品牌的bn 20磁开关,升降减速传感器采用sick品牌的wfs槽型光电,行走限位传感器采用omron品牌的d4mc行程开关,行走测距仪器采用sick品牌的dl100 pro长量程距离传感器,升降测距仪器采用sick品牌的olm100条码定位传感器,货叉原点传感器采用sick品牌的ime12接近传感器。货叉极限传感器采用sick品牌的ime12接近传感器,松动检测传感器采用omron品牌的d4mc行程开关,坠落检测传感器采用omron品牌的d4mc行程开关,升降限位传感器可采用schneider品牌的zck行程开关。
59.综上所述,本实用新型提供了一种堆垛机安全控制系统,该系统综合全面考虑了堆垛机运行中可能遇到的异常和风险。安全控制系统分为了安全电路防护和软件逻辑控制防护两部分,从硬件和软件两个方面同时对堆垛机运行提供了双重防护,最大程度保证了某部分安全装置异常时,整个系统不会因此失效。本实用新型提供的一种堆垛机安全控制系统,实现了堆垛机的全方位安全检测与防护,而且运行平稳,抗干扰能力强,安全可靠,控制便捷。
60.以上所述仅是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型技术原理的前提下,还可以做出若干改进和变形,这些改进和变形也应视为本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。