1.本技术涉及机器人及智能装备技术领域,特别是涉及一种机器人的电子控制系统及机器人。
背景技术:
2.自从第一台真正意义上的智能机器人研发至今,机器人及智能设备领域得到了快速发展。现有机器人类型主要分为工业机器人和服务机器人,其中,工业机器人指应用于生产过程与环境的机器人,主要包括人机协作机器人和工业移动机器人;服务机器人则是除工业机器人之外的、用于非制造业并服务于人类的各种先进机器人,主要包括个人服务机器人、家用服务机器人和公共服务机器人。
3.为保证机器人的安全运行,需要通过电子控制系统去监测和控制机器人的运行状态。目前使用的电子控制系统通常为多种功能模块的集合使用,即各个功能模块独立设计,且各功能模块将获得的数据传输至处理器进行集中性的处理,处理器同时接收各种进程任务以控制各种外设设备。
4.目前的电子控制系统中,各功能模块独立式设计,所以其开发周期长、开发成本高;再加上各个模块之间的通讯,需要各种各样的通讯线,这也增加了线缆的制作成本,增加机器内部结构设计难度,缩减了机器内部的使用空间。
5.另外,采用现有的多种电子模块的集合使用方式,在直接启动系统电源时,势必会造成电源的不稳定输出或者异常,再加上各模块的工作的特性不同,有些模块也会产生电磁干扰,从而影响其他功能模块的正常工作。
6.最后,机器人的整个系统在工作时,需要通过处理器的运算控制外设设备的工作,而多种模块将各种数据集中给处理器处理,势必会增加处理器的运算负荷,进而影响系统的不稳定性。
技术实现要素:
7.鉴于以上所述现有技术的缺点,本技术的目的在于提供一种机器人的电子控制系统及机器人,以优化机器人的电子控制系统并提高稳定性。
8.为实现上述目的及其他相关目的,本技术的第一方面,提供一种机器人的电子控制系统,所述电子控制系统包括:包括控制模块和电源分配模块;
9.所述电源分配模块向所述控制模块提供稳定地电力输出;
10.所述控制模块包括核心控制单元和监控单元;所述监控单元与机器人的外设设备连接,并将所述外设设备的异常状态上报至所述核心控制单元。
11.在本技术第一方面的某些实施方式中,所述控制模块还包括对所述核心控制单元进行电气隔离的电气隔离单元。
12.在本技术第一方面的某些实施方式中,所述控制模块还包括线程规划单元,所述线程规划单元对上报至核心控制单元的各路系统进程进行优先级管理。
13.在本技术第一方面的某些实施方式中,所述电源分配模块包括软启动保护单元和多路电源输出单元,所述软启动保护单元用于接收外部电压并在电源启动或电压峰值时输出稳定的电压至所述多路电源输出单元;所述多路电源输出单元分别与所述控制模块及机器人的外设设备相连。
14.在本技术第一方面的某些实施方式中,所述电源分配模块包括集成于所述电源分配模块内部以进行电气隔离的电源隔离单元。
15.在本技术第一方面的某些实施方式中,所述控制模块为一集成电路。
16.在本技术第一方面的某些实施方式中,所述电子控制系统还包括工控模块,所述工控模块用于控制和监测机器人的运行状态。
17.在本技术第一方面的某些实施方式中,所述电子控制系统还包括通讯显示模块,所述通讯显示模块与所述电源分配模块、控制模块和工控模块相连。
18.在本技术第一方面的某些实施方式中,所述通讯显示模块与所述工控模块通过网口连接。
19.本技术的第二方面,提供一种机器人,所述机器人包括前述任一项所述的机器人的电子控制系统。
20.如上所述,本技术机器人的电子控制系统及机器人,具有以下有益效果:
21.1)本技术的电子控制系统通过电源分配模块提供稳定的电压输出,保证电源开启瞬间,能有效的防止浪涌电流,高峰值的电压等不干净的电流信号造成给系统电压的输出异常,合理的分配电力资源;
22.2)本技术的控制模块和电源分配模块均包括一隔离系统,从而有效防止电磁干扰;并且还可通过监控单元时时监控外设设备的情况,若外设有异样情况,系统立刻启动相应的保护和上报机制;另外,本技术的系统里还包括线程规划单元,从而有效地提高了核心控制单元的处理效率,减轻其运算负荷;
23.3)本技术的控制模块为集中设计的模块,因此大大的减少了机器内部各种电子控制模块和线缆的使用量、增大了机器舱室储放空间、还有利于机器内部结构的优化;同时由于各模块的集成有效地降低了开发成本,减少机器内部各种电源和通讯线的使用,降低了生产成本。
附图说明
24.图1显示为本技术电子控制系统的一实现方式的结构示意图;
25.图2显示为本技术中控制模块的实施例一的结构示意图;
26.图3显示为本技术中控制模块的实施例二的结构示意图;
27.图4显示为本技术中控制模块的实施例三的结构示意图;
28.图5显示为本技术中电源分配模块的实施例一的结构示意图;
29.图6显示为本技术中电源分配模块的实施例二的结构示意图;
30.图7显示为本技术电子控制系统的另一实现方式的结构示意图;
31.图8显示为本技术电子控制系统的一具体应用电路图。
32.图中标号:
33.10电源分配模块;20控制模块;30工控模块;40通讯显示模块;
34.11软启动保护单元;12多路电源输出单元;电源隔离单元;
35.21核心控制单元;22监控单元;23电气隔离单元;24线程规划单元
具体实施方式
36.以下由特定的具体实施例说明本技术的实施方式,熟悉此技术的人士可由本说明书所揭露的内容轻易地了解本技术的其他优点及功效。
37.在下述描述中,参考附图,附图描述了本技术的若干实施例。应当理解,还可使用其他实施例,并且可以在不背离本公开的精神和范围的情况下进行机械组成、结构、电气以及操作上的改变。下面的详细描述不应该被认为是限制性的,并且本技术的实施例的范围仅由公布的专利的权利要求书所限定.这里使用的术语仅是为了描述特定实施例,而并非旨在限制本技术。空间相关的术语,例如“上”、“下”、“左”、“右”、“下面”、“下方”、“下部”、“上方”、“上部”等,可在文中使用以便于说明图中所示的一个元件或特征与另一元件或特征的关系。
38.虽然在一些实例中术语第一、第二等在本文中用来描述各种元件,但是这些元件不应当被这些术语限制。这些术语仅用来将一个元件与另一个元件进行区分,但是除非上下文以其他方式明确指出,否则它们不是同一个元件。
39.再者,如同在本文中所使用的,单数形式“一”、“一个”和“该”旨在也包括复数形式,除非上下文中有相反的指示。应当进一步理解,术语“包含”、“包括”表明存在所述的特征、步骤、操作、元件、组件、项目、种类、和/或组,但不排除一个或多个其他特征、步骤、操作、元件、组件、项目、种类、和/或组的存在、出现或添加。此处使用的术语“或”和“和/或”被解释为包括性的,或意味着任一个或任何组合。因此,“a、b或c”或者“a、b和/或c”意味着“以下任一个:a;b;c;a和b;a和c;b和c;a、b和c”。仅当元件、功能、步骤或操作的组合在某些方式下内在地互相排斥时,才会出现该定义的例外。
40.正如前面所述,在现有技术中,机器人的电子控制系统中各功能模块采用独立式设计,这样不仅导致开发周期长、开发成本高,而且各功能模块之间的通讯需要大量的通讯线,从而也提高了生产的成本及压缩了机器人的内部空间。另外,由于各模块的集合使用,通常会在启动电源时造成电源的不稳定或异常,且各模块之间容易产生电磁干扰,从而影响其他模块的正常运行。
41.请参阅图1~图4,图1显示为本技术机器人的电子控制系统的一实现方式的结构示意图;图2显示为本技术中控制模块的实施例一的结构示意图;图3显示为本技术中控制模块的实施例二的结构示意图;图4显示为本技术中控制模块的实施例三的结构示意图。
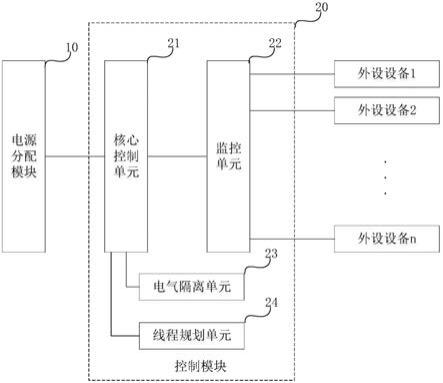
42.如图1和图2所示,所述机器人的电子控制系统包括电源分配模块10和控制模块20。所述电源分配模块10向所述控制模块提供稳定地电力输出。
43.所述电源分配模块10向整个系统提供稳定的电力输出,所述控制模块20及外设设备均由所述电源分配模块10进行电源供给。本实施例的电源分配模块10可以在电源开启瞬间,有效的防止浪涌电流、高峰值的电压等不干净的电流信号造成给系统电压的输出异常;并且,所述电源分配模块10还可根据不同功能模块的电压需求,提供不同路的降压电压,以满足控制模块、各种外设设备等的电压供给。
44.所述控制模块20包括核心控制单元21和监控单元22;所述监控单元22与机器人的
外设设备(如外设设备1、外设设备2......外设设备n)连接,并将所述外设设备的异常状态上报至所述核心控制单元21。
45.在具体应用中,所述外设设备可以包括上舱室电机、上舱室限位开关、上舱室照明灯、上舱这风扇、下舱室电机、下舱室限位开关、下舱室照明灯、下舱这风扇等设备,当然也可以包括其他设备,其并不以前述举例为限。
46.具体地,本实施例的核心控制单元21可以采用各种处理器来实现,例如可根据实际需求采用cpu(central processing unit/processor,中央处理器)、mcu(micro controller unit,微控制单元)、mpu(micro processor unit,微处理器单元)或dsp(digital signal processing/processor,数字信号处理器)等等。
47.所述监控单元22可以时时监控机器人的外设设备情况,若外设设备存在异样情况,所述监控单元22可以快速启动保护和上报机制,从而有效地提高系统的稳定性及性能。
48.本实际应用中,若外设设备数量较多,且功能多样化,因此为更好的实现各外设设备的监控,可以将所述监控单元22设置为一个、两个或两个以上;各监控单元可集成设计在一块电路上,本技术对此不做限制。
49.在本实施例中,所述控制模块20为一集成电路。集成电路(integrated circuit,ic)是一种微型电子器件或部件,采用一定的工艺,把一个电路中所需的晶体管、电阻、电容和电感等元件及布线互连一起,制作在一小块或几小块半导体晶片或介质基片上,然后封装在一个管壳内,成为具有所需电路功能的微型结构;其中所有元件在结构上已组成一个整体。本实施例的控制模块20可采用模拟集成电路、数字集成电路和数/模混合集成电路的形式,本技术对此不做限制。
50.本实施例中,通过将各个模块对应的控制单元以及监控单元做集成化设计,以形成一集成电路,通过这样的方式可有效地减少各模块之间的通讯电线或电缆,从而不仅降低了开发成本及生产成本,而且还降低了对机器人内部空间的占用,从而提高了整体性能。
51.请参阅图3,在本实施例中,所述控制模块20包括:核心控制单元21、监控单元22和电气隔离单元23。所述电气隔离单元23对所述核心控制单元21进行电气隔离(galvanic isolation);所述核心控制单元21和监控模块22可参考前述图2及实施例一的详细描述,在此不再赘述。
52.在具体应用中,虽然各个功能模块中的电流无法直接流过,但其能量或是资讯仍可以经由其他方式传递,例如电容、电磁感应或电磁波,或是利用光学、声学或是机械的方式进行。这样同样可以在两个功能模块之间不建立电流直接流动的路径,从而造成两个甚至多个不同的功能模块之间的电路中存在很大的干扰。本实施例中通过所述电气隔离单元对核心控制单元进行电气隔离,从而有效地在电路中避免电流从某一功能模块流到另外一功能模块。
53.所述电气隔离单元23可通过脉冲变压器隔离法、继电器隔离法、光电耦合器隔离法等方式来实现,本技术对此不做限制。
54.与实施例一的控制模块相类似地,本实施例中核心控制单元21、监控单元22以及电气隔离单元23同样可以集成设计在一个集成电路中,通过将各个模块或单元的集成化设计,可有效地减少各功能模块或单元之间的通讯电线或电缆,从而不仅降低了开发成本及生产成本,而且还降低了对机器人内部空间的占用,增大机器舱室储放空间,增大使用容量
至少40%,有利于机器内部结构的优化。
55.本实施例中,对控制模块做集成化设计,从而有效地降低了其开发成本和生产成本、增大了机器的使用空间;并且通过电气隔离单元有效地降低了各模块或单元之间的电磁干扰,大大提高了系统的稳定性。
56.请参阅图4,与图3所示实施例二不同的是,本实施例的控制模块20包括:核心控制单元21、监控单元22、电气隔离单元23和线程规划单元24。所述线程规划单元24对上报至核心控制单元21的各路系统进程进行优先级管理。所述核心控制单元21、监控模块22和电气隔离单元23可参考前述图~图3及其相关的详细描述,在此不再赘述。
57.在具体应用中,本实施例的线程规划单元24通过对系统里的核心线程进行规划,从而可以合理使用处理器资源,能有效的解决核心控制单元的运算负荷。具体地,所述线程规划单元24可以对上报至核心控制单元21的各路线程做优先级管理,按照优先级的高低,由所述核心控制单元21对优先级高的线程进行优先处理。当然,所述线程的优先级可以根据实际情况进行合理设置或调整,本技术对此不做限制。在其他实施例中,所述线程规划单元24还可以采用其他线程规划方式以有效地提高核心控制单元的处理效率。
58.本实施例中核心控制单元21、监控单元22、电气隔离单元23及线程规划单元24可以集成设计在一个集成电路中,这样可以有效地减少各功能模块或单元之间的通讯电线或电缆,从而不仅降低了开发成本及生产成本,而且还降低了对机器人内部空间的占用,增大机器舱室储放空间,增大使用容量至少40%,有利于机器内部结构的优化。
59.请参阅图5和图6,图5显示为本技术的电源分配模块的实施例一的结构示意图;图6显示为本技术的电源分配模块的实施例二的结构示意图。
60.如图5所示,在本实施例中,所述电源分配模块10包括软启动保护单元11和多路电源输出单元12,所述软启动保护单元11用于接收外部电压并在电源启动或电压峰值时输出稳定的电压至所述多路电源输出单元;所述多路电源输出单元12分别与所述控制模块20及机器人的外设设备(外设设置1、外设设备2......外设设备n)相连。
61.本实施例中所述控制模块20包括核心控制单元21和监控单元22。所述核心控制单元21和监控单元22的具体结构及工作过程可参考图1及其详细描述,在此不再赘述。需要说明的是,在其他实施例中,所述控制模块20还可以包括电气隔离单元,所述电气隔离单元可参考前述图3及实施例二中的描述。类似地,所述控制模块20还可以包括线程规划单元,所述电气隔离单元可参考前述图4及实施例三中的详细描述,在此不再赘述。
62.继续参考图5,所述软启动保护单元11可以通过增加脉冲宽度的方式,以使得作用于变换器控制电路的负载逐渐增大,从而在电源启动期间减小进入电源的浪涌电流。通过这样的渐进式启动方式不仅减小了输出电容和变换器部件上的浪涌电流应力,也减轻了在推挽式和桥式电路中变压器“双倍磁通效应”(flux doubling)的问题。同时,所述软启动保护单元11还可以有效的防止高峰值的电压等不干净的电流信号造成的电压的输出异常。当然,在其他实施例中,还可以包括浪涌的抑制电路,这样可以直接对进入电源的电流进行限制以进一步减少电源启动时进入电源的浪涌电流,从而实现更加稳定的电压输出,本技术对此不做限制。
63.所述多路电源输出单元12可以提供多路不同的输出电压,从而有效地满足不同功能模块或机器人的外设设备的电压需求。所述多路电源输出单元可以在设计为一集成芯
片,从而有效地提高系统的集成性及降低成本。
64.本实施例的电源分配模块通过软启动保护单元有效地地防止了电源启动时的浪涌电流,提供稳定的电压输出,同时通过多路电源输出单元输出不同的电压以满足各功能模块或单元的电压需求,不仅提高了电压输出的稳定性,还大大降低了成本。
65.请参阅图6,在本实施例中,所述控制模块20包括核心控制单元21和监控单元22。所述核心控制单元21和监控单元22的具体结构及工作过程可参考图1及其详细描述,在此不再赘述。在其他实施例中,所述控制模块20还可以包括电气隔离单元,所述电气隔离单元可参考前述图2及实施例二中的描述。类似地,所述控制模块20还可以包括线程规划单元,所述电气隔离单元可参考前述图3及实施例三中的详细描述,在此不再赘述。
66.本实施例中,对控制模块做集成化设计,从而有效地降低了其开发成本和生产成本、增大了机器的使用空间;并且通过电气隔离单元有效地降低了各模块或单元之间的电磁干扰,大大提高了系统的稳定性。
67.继续参考图6,本实施例的电源分配模块10包括软启动保护单元11、多路电源输出单元12和电源隔离单元13。所述软启动保护单元11用于接收外部电压并在电源启动或电压峰值时输出稳定的电压至所述多路电源输出单元;所述多路电源输出单元12分别与所述控制模块20及机器人的外设设备(外设设置1、外设设备2......外设设备n)相连。所述电源隔离单元13对所述电源分配模块10进行电气隔离。
68.所述电源隔离单元13可通过脉冲变压器隔离法、继电器隔离法、光电耦合器隔离法等方式来实现,本技术对此不做限制。本实施例的电源隔离单元可有效避免两个功能模块之间建立电流流动的路径而导致的电磁干扰,从而大大提高了系统的稳定性。
69.图7显示为本技术电子控制系统的另一实现方式的结构示意图;如图所示,所述电子控制系统包括:电源分配模块10、控制模块20和工控模块30。
70.所述电源分配模块10向整个系统提供稳定的电力输出,所述控制模块20及外设设备均由所述电源分配模块10进行电源供给。本实施例的电源分配模块10可以在电源开启瞬间,有效的防止浪涌电流、高峰值的电压等不干净的电流信号造成给系统电压的输出异常;并且,所述电源分配模块还可根据不同功能模块的电压需求,提供不同路的降压电压,以满足控制模块、各种外设设备等的电压供给。所述电源分配模块10的具体结构及工作过程可参考前述图5、图6及其相关描述,在此不再赘述。
71.本实施例中,所述控制模块20为一集成电路,即采用一定的工艺,把该控制模块20中所需的晶体管、电阻、电容和电感等元件及布线互连一起,制作在一小块或几小块半导体晶片或介质基片上,然后封装在一个管壳内,成为具有所需电路功能的微型结构;其中所有元件在结构上已组成一个整体。本实施例的控制模块20可采用模拟集成电路、数字集成电路和数/模混合集成电路的形式,本技术对此不做限制。所述控制模块20可采用前述图2~图4中所示的结构来实现,具体的工作原理及过程可参考前述的详细说明,本技术对此不再赘述。
72.本实施例中,通过将各个模块对应的控制单元以及监控单元做集成化设计,以形成一集成电路,通过这样的方式可有效地减少各模块之间的通讯电线或电缆,从而不仅降低了开发成本及生产成本,而且还降低了对机器人内部空间的占用,从而提高了整体性能。
73.继续参考图7,所述工控模块30用于控制和监测机器人的运行状态。所述工控模块
30为机器人运行的控制中心,主要用控制和监测整个机器的运行状态。所述工控模块30可以采用工控机来实现。在具体应用中,可以采用总线结构,对机器人及其外设设备进行检测与控制。具体地,所述工控机可具有cpu、硬盘、内存、外设及接口,并有实时的操作系统、控制网络和协议、计算能力,友好的人机界面等。例如,可采用plc(可编程控制系统)、dcs(分散型控制系统)、fcs(现场总线系统)及cnc(数控系统)中的一种系统以完成对机器人运行状态的监测和控制。
74.继续参考图7,所述电子控制系统还包括通讯显示模块40,所述通讯显示模块40与所述电源分配模块10、控制模块20和工控模块30相连。在本实施例中,所述通讯显示模块40与所述工控模块30通过网口连接。当然,在其他实施例中,所述通讯显示模块40与工控模块30也可以通过其他形式(如wifi、蓝牙、电缆)进行通信,本技术对此不做限制。所述通讯显示模块40还可以外接显示屏,以进行各种状态、信号通信的显示等等。所述通讯显示模块40可以为触摸屏,例如可以采用接收触头等输入讯号的感应式液晶显示屏作为所述通讯显示模块。通过触摸屏幕上的图形按钮,由屏幕上的触觉反馈系统根据预先编程的程式驱动其连结装置以实现各种指令或操作的输入,从而实现快捷的人机交互。
75.下面再结合图8所示的具体应用电路图对本技术的电子控制系统做进一步详细说明。
76.如图8所示,本技术的电子控制系统主要有电源分配模块、控制模块、通讯显示模块,工控模块四大模块组成。
77.电源分配模块是整个系统电力稳定输出,它给主要给控制模块,通讯显示模块,外设设备等进行电源供给。在机器人开机即电源启动时,由所述电源分配模块对电源开启瞬间的浪涌以及对高峰值的电压等不干净的电流信号进行控制以避免造成系统电压的输出异常。另外,所述电源分配模块还可以供给不同路的降压电压,以满足通讯显示模块、控制模块以及各种外设设备的电压供给。同时为避免电源分配模块间的各单元的电磁干扰,对所述电源分配模块进行了电气隔离,这样进一步提高了系统的稳定性。
78.所述控制模块接收所述电源分配模块输出的稳定电压。为有效地降低各功能模块的控制模块的独立开发设计,在本技术中将所有的控制电路做集成设计,以形成所述控制模块,这样有效的降低了其成本并大大节约了机器的内部空间。为防止其他的电磁干扰其模块的敏感器件对所述控制模块也做了电气隔离。当控制模块监控到各外设设备的状态异常时,可对异常反馈信号进行相应的保护和上报机制。同时,为合理使用其处理器资源、有效的解决mcu运算负荷,所述控制模块对上报的各路线程进行管理并监视其开启和关闭,这样就有效地提高了处理效率。
79.所述工控模块是整个机器的运行控制中心,主要控制和监测整个机器的运行状态,并与所述通讯显示模块进行显示和各种信号的通讯,从而由工控模块来控制整个机器的运行。
80.在具体应用中,所述电子控制系统还可以包括其他模块,如功放模块、外接的显示屏及各类辅助控制板(如stm32板、安卓调试usb板等等),其并不限制本技术的保护范围。
81.本技术还提供一种机器人,所述机器人包括电子控制系统和外设设备。所述电子控制系统用于对所述外设设备进行监测和控制。
82.具体地,所述电子控制系统可包括电源分配模块、控制模块,所述电源分配模块向
整个系统提供稳定的电力输出,所述控制模块及外设设备均由所述电源分配模块进行电源供给。
83.本技术的电源分配模块可以在电源开启瞬间,有效的防止浪涌电流、高峰值的电压等不干净的电流信号造成给系统电压的输出异常;并且,所述电源分配模块还可根据不同功能模块的电压需求,提供不同路的降压电压,以满足控制模块、各种外设设备等的电压供给。
84.所述控制模块用于对机器人的外设设备进行状态监控及线程优化等,以有效的提高系统的性能。所述控制模块中可以包括处理单元、存储单元等。所述存储单元用于存储所述深度感知装置所获取到的图像数据。所述存储单元可以包括各类存储器。所述存储器可包括高速随机存取存储器,并且还可包括非易失性存储器,例如一个或多个磁盘存储设备、闪存设备或其他非易失性固态存储设备。在某些实施例中,存储器还可以包括远离一个或多个处理器的存储器,例如经由rf电路或外部端口以及通信网络(未示出)访问的网络附加存储器,其中所述通信网络可以是因特网、一个或多个内部网、局域网(lan)、广域网(wlan)、存储局域网(san)等,或其适当组合。存储器控制器可控制设备的诸如cpu和外设接口之类的其他组件对存储器的访问。另外,所述电子控制系统还可以包括工控模块和通讯显示模块,所述电子控制系统的结构及工作原理可参考图1~图8的详细描述,在此不再赘述。
85.本技术机器人的电子控制系统及机器人将控制模块做集成设计,从而大大降低开发成本和生产成本;进一步地,由于集成设计还节省了各功能模块之间的通讯电缆量,从而有效的提高了机器的内部空间;另外,通过电源分配模块提供稳定的电压输出且实现软启动保护机制,通过隔离单元有效地防止了各模块之间的电磁干扰,并且通过线程规划单元有效地提高了处理器的处理效率,进而提高了系统的性能。
86.上述实施例仅例示性说明本技术的原理及其功效,而非用于限制本技术。任何熟悉此技术的人士皆可在不违背本技术的精神及范畴下,对上述实施例进行修饰或改变。因此,举凡所属技术领域中具有通常知识者在未脱离本技术所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本技术的权利要求所涵盖。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。