1.本实用新型属于方舱设备领域,特别涉及一种方舱双舱自动调平系统。
背景技术:
2.目前方舱医院常使用方舱等进行组合。方舱与方舱之间常通过通道连接。
3.双舱平行设立,左右对准、处于同一高度对方舱的组合化应用尤其重要,关系着方舱间的连接。如两舱连接处无法对齐,则无法使用硬质连接设备或直接连接,只能通过软质通道进行连接。
4.目前国内外的组合方舱中,双舱调整大多需要人工进行调整,方舱连接也大多采用人工手动进行连接,精度低、自动化程度低、部署时间长、需要消耗大量的人力,严重制约了方舱的野外部署速度,不能较好地满足野外条件下快速部署的使用需求。
5.如何调节两舱,使两舱平行设立,左右对准、处于同一高度是需要解决的问题。
技术实现要素:
6.本实用新型提出了一种方舱双舱自动调平系统,包括:对接舱、方舱运输设备和目标舱;
7.所述方舱运输设备用于运载对接舱;
8.所述方舱运输设备能够带动对接舱前后左右方向运动;
9.所述对接舱上设置有对接面,所述目标舱上设置有目标面;
10.所述对接面与目标面截面相同;
11.所述目标面上部设置有反射板,所述反射板包括左右反射板、上下反射板和若干平面反射板;
12.所述对接面上部对应设置有激光测距传感器,所述激光测距传感器包括左右激光测距传感器、上下激光测距传感器和若干平面激光测距传感器;
13.所述对接舱四角设置有四个对接调平支腿;
14.四个所述对接调平支腿底部能够伸长至地面;
15.所述对接舱内设置有控制器,所述控制器与激光测距传感器和对接调平支腿电路连接,所述控制器与方舱运输设备通信连接;
16.所述若干平面激光测距传感器能够测量对接舱和目标舱之间距离,得到距离值;所述控制器能够接收距离值并根据距离值控制方舱运输设备前进或后退;所述控制器能够接收距离值并根据距离值控制方舱运输设备转动;
17.所述控制器能够接收所述左右激光测距传感器的左右测量值,并根据左右测量值计算出对接舱和目标舱左右偏移值,控制器能够根据左右偏移值控制方舱运输设备左移或右移;
18.所述控制器接收所述上下激光测距传感器上下测量值,并根据上下测量值计算出对接舱和目标舱上下偏移值,控制器能够根据上下偏移值控制对接调平支腿伸长或缩短。
19.进一步地,所述左右反射板、上下反射板和若干平面反射板处于同一水平高度。
20.进一步地,若干所述平面反射板对称设置在所述目标面上部。
21.进一步地,所述左右反射板为左右45度反射板,所述上下反射板为上下45度反射板。
22.进一步地,所述平面反射板有2个,第一平面反射板和第二平面反射板25)。
23.进一步地,所述左右反射板、上下反射板设置在2个平面反射板之间。
24.进一步地,所述方舱运输设备为重载agv。
25.进一步地,所述目标舱四角设置有四个目标调平支腿,
26.四个所述目标调平支腿底部能够伸长至地面。
27.进一步地,操作人员能够通过控制器控制方舱双舱自动调平系统;
28.所述控制器还能控制各对接调平支腿同步伸长/缩短;
29.所述控制器还能控制单条对接调平支腿伸长/缩短。
30.进一步地,所述控制器还能向方舱运输设备发送命令信号,方舱运输设备向各方向运动和转动。
31.本实用新型所设计的一种方舱双舱自动调平系统,能够使用不同方舱进行自动调平,使两舱处于预设的距离,平行设立,左右对准、处于同一高度,结构简单、易维护、精度高,控制简单。
附图说明
32.图1示出了本实用新型实施例的一种方舱双舱自动调平系统第一立体效果图;
33.图2示出了本实用新型实施例的一种方舱双舱自动调平系统第二立体效果图;
34.图3示出了本实用新型实施例的一种方舱双舱自动调平系统激光测距传感器布置图;
35.图4示出了本实用新型实施例的一种方舱双舱自动调平系统反射板布置图;
36.图5示出了本实用新型实施例的一种方舱双舱自动调平系统对接调平支腿正视图和侧视图;
37.图6示出了本实用新型实施例的一种方舱双舱自动调平系统传动系统原理图;
38.图7示出了本实用新型实施例的一种方舱双舱自动调平系统双舱前后距离与轴线角度判断原理图;
39.图8示出了本实用新型实施例的一种方舱双舱自动调平系统双舱左右误差补偿第一原理图;
40.图9示出了本实用新型实施例的一种方舱双舱自动调平系统双舱左右误差补偿第二原理图;
41.图10示出了本实用新型实施例的一种方舱双舱自动调平系统双舱高度调节原理图。
42.图中:1、对接舱;11、对接面;2、目标舱;21、目标面;22、左右反射板;23、上下反射板;24、第一平面反射板;25、第二平面反射板;3、对接调平支腿;31、伺服电机;32、减速器;33、滚珠丝杆;34、支撑机构。
具体实施方式
43.下面将参照附图更详细地描述本公开的示例性实施例。虽然附图中显示了本公开的示例性实施例,然而应当理解,可以以各种形式实现本公开而不应被这里阐述的实施例所限制。相反,提供这些实施例是为了能够更透彻地理解本公开,并且能够将本公开的范围完整的传达给本领域的技术人员。
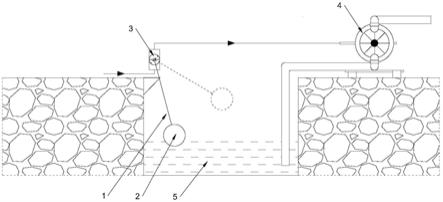
44.本实用新型提供了一种方舱双舱自动调平系统,如图1图2所示,图1图2为方舱双舱自动调平系统两种不同方向的立体效果图。方舱双舱自动调平系统包括对接舱1、方舱运输设备(图中未示出)和目标舱2;所述方舱运输设备用于运载对接舱1;所述方舱运输设备能够带动对接舱1前后左右各方向运动。所述方舱运输设备为重载agv(automated guided vehicle,无人搬运车)。
45.所述对接舱1上设置有对接面11,所述目标舱2上设置有目标面21;所述对接面11与目标面21截面相同。进一步地,对接面11与目标面21须垂直于水平面。本实用新型所设计的方舱双舱自动调平系统,适用于两个标准方舱自动调平;如一个方舱同时包括对接面11与目标面21,本实用新型也适用于若干这种方舱进行调平,即第二个方舱对接面与第一个目标面调平,第三个对接面与第二个目标面调平,直至所有的方舱调平。本实用新型所设计的方舱双舱自动调平系统,通过调平手段,使后续双舱更容易对接,且对接使用硬质材料,因此,两个方舱之间用于调平的舱面截面必须相同。因此,本实用新型还可以适用于两个不同的方舱,其中用于调平的舱面截面必须相同。
46.如图4所示,所述目标面21上部设置有反射板,所述反射板包括左右反射板22、上下反射板23和若干平面反射板。如图3所示,所述对接面11上部对应设置有激光测距传感器,一个反射板对应设置有一个激光测距传感器,所述激光测距传感器包括左右激光测距传感器、上下激光测距传感器和若干平面激光测距传感器。如左右反射板22对应的是左右激光测距传感器,左右激光测距传感器中左右仅代表名称,左右激光测距传感器具有激光测距传感器所有功能。所述左右反射板22、上下反射板23和若干平面反射板处于同一水平高度。优选的,若干平面反射板对称设置在目标舱2轴线两侧。平面反射板与目标面21平行。所述左右反射板22为左右45度反射板,即该反射板垂直于水平面,与目标面21呈45度夹角。所述上下反射板23为上下45度反射板,即该反射板与目标面21和水平面均呈45度夹角。左右反射板22和上下反射板23还可以与水平面和目标面21设置其他角度,只要左右反射板22垂直于水平面,与目标面21夹角在0至90度之间(不包括0度和90度);上下反射板23所在平面与目标面21所在平面接触处直线平行于水平面,上下反射板23与目标面21夹角在0至90度之间(不包括0度和90度)即可。
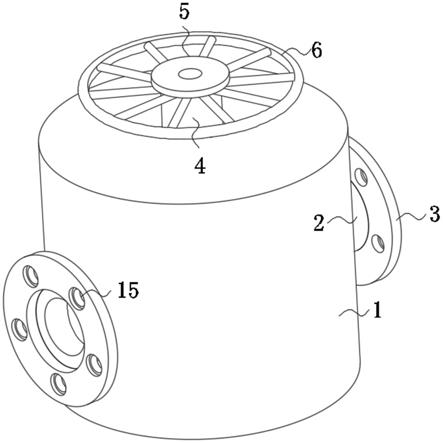
47.所述平面反射板有2个,第一平面反射板24和第二平面反射板25。所述左右反射板22、上下反射板23设置在2个平面反射板之间。图4中,由左至右顺序为第一平面反射板24、左右反射板22、上下反射板23和第二平面反射板25。左右反射板22也可以设置在上下反射板23右侧,并不影响本实用新型的使用。
48.所述对接舱1内设置有控制器,所述控制器与激光测距传感器和对接调平支腿3电路连接,所述控制器与方舱运输设备通信连接,优选的,控制器与方舱运输设备通过无线设备通信连接。
49.所述对接舱1四角设置有四个对接调平支腿3;四个所述对接调平支腿3底部能够
伸长至地面。当对接舱1不需要使用agv时,四个所述对接调平支腿3伸长至地面,支撑起对接舱1,agv从对接舱1下驶出,四个所述对接调平支腿3按需要伸长或缩短。当对接舱1需要移动时,四个所述对接调平支腿3伸长,直至对接舱1最下端高度高于agv最上端的高度,agv运动到对接舱1下方,四个所述对接调平支腿3缓慢缩短,对接舱1下降。当对接舱1放置到agv上后,四个所述对接调平支腿3根据需求,继续缩短或保持不动。
50.如图5所示,所述对接调平支腿3包括伺服电机31、减速器32、滚珠丝杆33和支撑机构34。如图6所示,所述伺服电机31输出端与减速器32输入轴连接;所述减速器32输出轴与滚珠丝杆33相连接。
51.控制器计算出对接调平支腿3伸长或缩短的距离,向对接调平支腿3对应的伺服电机31发送运动信号,伺服电机31通过减速器32齿轮副机构,带动滚珠丝杆33旋转,在丝杆旋转力矩的驱动下,螺母与滑套做往复直线运动,使得对接调平支腿3完成伸长或缩短直线运动。
52.所述支撑机构34第一端与方舱外侧固定连接,所述支撑机构34第二端与所述滚珠丝杆33外侧滑套固定连接。对接调平支腿3通过支撑机构34固定连接在方舱外侧。所述对接调平支腿3收拢时,底部高于方舱最低面,优选的,底部高于方舱最低面超过100mm。对接调平支腿伸长时,其升降行程要远大于agv最上端的高度,这种设计能保证agv驶入方舱下方执行方舱运输、保证方舱在转运过程中对接调平支腿3不与地面接触,并能充分满足调平需求。
53.所述目标舱2四角设置有四个目标调平支腿,四个所述目标调平支腿能够伸长/缩短,其底部能够伸长至地面。目标调平支腿和对接调平支腿3结构、功能相同。
54.优选的,所述方舱双舱自动调平系统还包括锁死机构,当所述锁死机构锁死时,对接调平支腿3不再伸长或缩短。
55.所述若干平面激光测距传感器能够测量对接舱1和目标舱2之间距离,得到距离值。所述控制器能够接收距离值并根据距离值计算出需要前进或后退的距离,向方舱运输设备发送命令信号,方舱运输设备搭载对接舱1前进或后退。
56.可以使用但不限于以下方式测距并控制方舱运输设备前进或后退。预设靠近距离阈值和远离距离阈值,若干个平面激光测距传感器分别通过测量对应的平面反射板,得到若干对接舱1和目标舱2之间的距离值;当所有距离值均大于靠近距离阈值时,方舱运输设备继续运载对接舱1向目标舱2靠近;当所有距离值均小于等于靠近距离阈值时,方舱运输设备运载对接舱1远离目标舱2;当所有距离值中任一值大于靠近距离阈值且小于等于靠近距离阈值时,方舱运输设备停止移动。
57.还可以使用但不限于以下方式测距并控制方舱运输设备前进或后退。如图7所示,选取两侧对称的平面激光测距传感器,测得距离值分别为n1、n2…
n
k
。假设其平均值为n。预设双舱距离值阈值和距离误差阈值。
58.当n>双舱距离值阈值,且
│
n
‑
双舱距离值阈值
│
>距离误差阈值时,控制器控制方舱运输设备运载对接舱1向目标舱2靠近。
59.当n<双舱距离值阈值,且
│
n
‑
双舱距离值阈值
│
>距离误差阈值时,控制器控制方舱运输设备运载对接舱1远离目标舱2。
60.当n>双舱距离值阈值且
│
n
‑
双舱距离值阈值
│
≤距离误差阈值,或n<双舱距离值阈
值且
│
n
‑
双舱距离值阈值
│
≤距离误差阈值时,控制器控制方舱运输设备停止运动。
61.所述控制器能够接收距离值并根据距离值计算出需要前进或后退的距离,向方舱运输设备发送命令信号,方舱运输设备搭载对接舱1前进或后退;所述控制器能够接收距离值并判断对接舱1需要调整的方向,并向方舱运输设备发送信号,方舱运输设备搭载对接舱1转动。
62.可以使用但不限于以下方式控制方舱运输设备转动。如图7所示,左侧为目标舱2,右侧为对接舱1;选取对称设置的两个平面激光测距传感器,假设分别对应第一平面反射板24和第二平面反射板25;测得距离值分别为l1和l2,假设l1<l2,则对接舱1远离目标舱2一侧向第二平面反射板25方向(即距离值较长一方)转动,控制器不断地接收平面激光测距传感器实时反馈的距离值l1和l2。预设转动阈值,当l1和l2之间的差小于转动阈值时,停止转动。此时,对接面11平行于目标面21。
63.所述控制器能够接收所述左右激光测距传感器的左右测量值,并根据左右测量值计算出对接舱1和目标舱2左右偏移值,控制器根据左右偏移值向方舱运输设备发送命令信号,方舱运输设备搭载对接舱1进行左移或右移。
64.可以使用但不限于以下方式调整两舱左右关系。此方法适用于两舱之间距离特定,即已经调整为设定值。如图8所示,对接面11已经平行于目标面21。预设l值,l值为固定值,优选的,l值为满足两舱对接的距离值,即当方舱进行对接时,对接舱的对接底板需要放下,搭在目标舱的支撑架上,需要有一个标准距离,使对接底板能刚好搭在支撑架上,这个l就是这个标准距离值。通过平面激光测距传感器测量出的l1或l2值(此时l1=l2)等于方舱之间的距离值。
65.对接舱1已经通过前进或后退,使得两舱之间的距离处于设定的范围,此时,l1=l2=l。
66.如图9所示,目标舱2与对接舱1存在水平差值。左右反射板22反射面朝向对接舱1左侧,控制器根据左右激光测距传感器通过左右反射板22测量出的左右测量值l
22
计算左右偏移值,当l
22
<l时,方舱运输设备搭载对接舱1左移;当l
22
>l时,方舱运输设备搭载对接舱1右移。
[0067][0068]
为舱体需要移动的距离,时,向右移动时,向右移动时,向左移动l为预设值,l
22
为实际左右激光测距传感器测量左右反射板测得所得值,即左右测量值。
[0069]
对接舱1左右移动时,同时继续测量l
22
,并按新的l
22
计算新的值。预设左右移动阈值,当时,对接舱1不再左右移动。
[0070]
当左右反射板22反射面朝向对接舱1右侧时,则左右移动相反,本领域技术人员能够推导出相应的移动方式。
[0071]
还可以使用但不限于以下方式调整两舱左右关系。此方法适用于两舱之间距离未调整为设置值。如图8所示,对接面11已经平行于目标面21,选取对称设置的两个平面激光
测距传感器,假设分别对应第一平面反射板24和第二平面反射板25;测得距离值分别为l1和l2,即第一个平面激光测距传感器通过对应的第一平面反射板24测量出距离值为l1,第二个测量出为l2,l1=l2。此时,左右激光测距传感器如果测量左右反射板22中心位置所在平面,此平面垂直于水平面,则也与l1和l2相同。但是由于双舱之间存在左右偏移,则左右激光测距传感器测量时,实际激光打在左右45度反射板22两侧,因此,左右测量值l
22
要大于或小于l1或l2。
[0072]
如图9所示,左右反射板22反射面朝向对接舱1左侧,即其凸出部分靠近对接舱1右侧。如果激光打在左右45度反射板2凸出部分,则l
22
小于l1或l2,此时控制对接舱1向左侧移动。反之则l
22
大于于l1或l2,控制对接舱1向右侧移动。
[0073][0074]
为舱体需要移动的距离,时,向右移动时,向右移动时,向左移动l为平面激光测距传感器测量对应的平面反射板所得值,如l1或l2,l
22
为实际左右激光测距传感器测量左右反射板测得所得值,即左右测量值。
[0075]
对接舱1左右移动时,同时继续测量l值和l
22
,并按新的l值和l
22
计算新的值。预设左右移动阈值,当时,对接舱1不再左右移动。
[0076]
当左右反射板22反射面朝向对接舱1右侧时,则左右移动相反,本领域技术人员同样能够推导出相应的移动方式。
[0077]
所述控制器能够根据所述上下激光测距传感器的上下测量值计算出对接舱1和目标舱2上下偏移值,并根据上下偏移值控制对接调平支腿3伸长或缩短。
[0078]
可以使用但不限于以下方式调整两舱之间高度差。如图10所示,当对接舱1与目标舱2左右已经对准,对接舱1的对接调平支腿伸长至地面,支撑起对接舱1。方舱运输设备从对接舱1下驶出。上下激光测距传感器通过上下反射板23测量出上下测量值l
23
值,再求出对应的值,所使用与调整两舱左右关系相似。并通过对接调平支腿伸长或缩短调节对接舱1高度。
[0079]
对接舱1上下移动时,同时继续测量l
23
的值,并按新的l
23
的值计算新的值。预设上下移动阈值,当时,对接舱1不再上下移动。
[0080]
如果对接舱1与目标舱2放置地较平整,对接舱和目标舱高度误差调节完毕,控制对接舱1的四个对接调平支腿3和目标舱2四个目标调平支腿伸长或缩短相同距离。使得两者高度水平一致。
[0081]
所述方舱双舱自动调平系统还包括电源组件,所述电源组件用于给方舱双舱自动调平系统供电;所述电源组件采用锂电池储能,电池容量能够满足方舱多次调平展收要求。优选的,电池容量dc48v100ah。方舱或医院系统电路能够使用充电器为锂电池充电。
[0082]
操作人员能够通过控制器控制方舱双舱自动调平系统。优选的,所述控制器还包括触摸屏;操作人员能够通过触摸屏控制方舱双舱自动调平系统。优选的,触控屏安装于方
舱外壁,其外部设置有防雨设施,使用时打开孔口门,即可操作。
[0083]
本实用新型所设计的方舱双舱自动调平系统,所述控制器还能控制各对接调平支腿3同步伸长/缩短;可选定多条对接调平支腿3,设置对接调平支腿3伸长/缩短量;所有选择的对接调平支腿3同步伸长/缩短。伸长时,方舱落地后对接调平支腿3会继续伸长直至到达指定伸长量。伸长/缩短时,到达限位距离后自动停下。控制器还能控制单条对接调平支腿3伸长/缩短。这种对单条对接调平支腿3的单腿操作可以满足一些特殊情况下的使用要求,如使方舱以一定角度倾斜。所述控制器还能向方舱运输设备发送命令信号,使方舱运输设备向各方向运动和转动。操作人员能通过这种方式,人工对双舱进行调平。如测量确定目标舱2比对接舱1高1cm,则控制四条对接调平支腿3同时伸长1cm。人工也能够进行调平。方舱调平之前,由操作人员控制方舱运输设备运载对接舱1向目标舱2靠近,转动角度,使对接面11面向目标面21。人工控制好相应角度、方向、距离等,再控制对接调平支腿3伸长/缩短相应长度,即完成人工调平。
[0084]
方舱双舱自动调平系统还具有其他功能,如停止功能;无论系统运行至任何状态,操作人员按下停止按键,系统将进入停止状态。
[0085]
本实用新型使用如下方式进行自动调平:
[0086]
步骤s1
‑
s4均使用方舱运输设备进行调整,步骤s5用于撤出方舱运输设备,步骤s6使用对接调平支腿3进行调整。
[0087]
s1:目标舱2放置后,方舱运输设备运载对接舱1向目标舱2靠近,使对接面11面向目标面21。
[0088]
步骤s1用于解决两舱之间有较大偏差问题。目标舱2放置后,操作人员通过控制方舱运输设备,方舱运输设备运载对接舱1向目标舱2靠近,使对接面11面向目标面21;另一种设计,目标舱2和对接舱1均设置有全球定位系统,如北斗、gps等。方舱运输设备根据目标舱2的定位信号,运载对接舱1向目标舱2靠近,使对接面11面向目标面21。通过人工或定位系统,方舱运输设备运载对接舱1,使得对接舱1与目标舱2已经处于较平行设立,前后左右上下可能具有小误差。本实用新型所设计的“双舱自动调平系统”,是用于解决这种小的误差。像肉眼可见很大的偏差,比如两舱相距极远,两舱左右偏移过大等,由全球定位系统自动或操作人员人工操作解决。
[0089]
s2:预设靠近距离阈值和远离距离阈值,若干平面激光测距传感器测量对接舱1和目标舱2之间距离,得到若干距离值;当距离值均大于靠近距离阈值时,控制器控制方舱运输设备运载对接舱1向目标舱2靠近;当距离值均小于远离距离阈值时,控制器控制方舱运输设备运载对接舱1远离目标舱2;当某一个距离值处于靠近距离阈值和远离距离阈值之间时,控制器控制方舱运输设备停止运动。
[0090]
若干平面激光测距传感器可以选取所有的平面激光测距传感器,也可以选取沿对接舱1轴线对称设置的部分平面激光测距传感器。至少选取两个对称的平面激光测距传感器。
[0091]
当需要严格控制两舱之间的距离时,还可以使用s21替代s2。
[0092]
s21:预设双舱距离值阈值和距离误差阈值;若干平面激光测距传感器测量对接舱1和目标舱2之间距离,得到若干距离值;
[0093]
当所有距离值的平均值>双舱距离值阈值,且
│
所有距离值的平均值
‑
双舱距离值
阈值
│
>距离误差阈值时,
[0094]
控制器控制方舱运输设备运载对接舱1向目标舱2靠近;
[0095]
当所有距离值的平均值<双舱距离值阈值,且
│
所有距离值的平均值
‑
双舱距离值阈值
│
>距离误差阈值时,
[0096]
控制器控制方舱运输设备运载对接舱1远离目标舱2;
[0097]
当所有距离值的平均值>双舱距离值阈值,且
│
所有距离值的平均值
‑
双舱距离值阈值
│
≤距离误差阈值,或
[0098]
所有距离值的平均值<双舱距离值阈值,且
│
所有距离值的平均值
‑
双舱距离值阈值
│
≤距离误差阈值时,
[0099]
控制器控制方舱运输设备停止运动。
[0100]
示例性的,如选取两侧对称的平面激光测距传感器,测得距离值分别为l1和l2。当l1和l2的平均值与双舱距离值阈值之差在距离误差阈值范围内,方舱运输设备停止运动。
[0101]
s3:控制器接收对称设置的平面激光测距传感器传来的距离值控制方舱运输设备转动。
[0102]
s3用于调整两者的对接面11与目标面21之间保持平行。
[0103]
s4:控制器接收左右激光测距传感器的左右测量值并计算左右偏移值,并根据左右偏移值向方舱运输设备发送信号,方舱运输设备搭载对接舱1左移或右移。
[0104]
s4用于调整对接舱1和目标舱2之间左右关系,使两者左右对齐。
[0105]
步骤s3与s4调整后,可能会影响到双舱之间的距离,可以重新执行s2步骤,使双舱距离更符合要求。
[0106]
s5:对接舱1的各对接调平支腿伸长至地面,支撑起对接舱1;方舱运输设备从对接舱1下驶出。
[0107]
步骤s5用于撤出方舱运输设备。
[0108]
s6:控制器接收上下激光测距传感器的上下测量值并计算上下偏移值,并根据上下偏移值控制对接调平支腿3伸长或缩短。
[0109]
s6用于调整对接舱1和目标舱2之间上下关系,使两者上下对齐。
[0110]
本实用新型所设计的一种方舱双舱自动调平系统,能够使用不同方舱进行自动调平,使两舱处于预设的距离,平行设立,左右对准、处于同一高度,结构简单、易维护、精度高,控制简单。
[0111]
以上仅为本技术的实施例而已,并不用于限制本技术。对于本领域技术人员来说,本技术可以有各种更改和变化。凡在本技术的精神和原理之内所作的任何修改、等同替换、改进等,均应包含在本技术的权利要求范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。