摄像镜头
1.本技术是申请日为2020年2月6日,申请号为2020101056071,名称为“摄像镜头”的分案申请。
技术领域
2.本发明涉及在ccd传感器、cmos传感器等摄像元件上形成被摄体图像的摄像镜头,涉及适合于装入在便携电话机、便携信息终端等便携设备中内置的摄像机、数码静物相机、安防摄像机、车载摄像机、网络摄像机等比较小型的摄像机中的摄像镜头。
背景技术:
3.除了语音通话功能以外还能够执行各种应用程序软件的多功能便携电话机、所谓的智能手机(smart phone)得到了普及。通过执行安装在智能手机中的应用程序软件,例如能够在智能手机上实现数码静物相机、车载导航仪等的功能。近年来,增强现实(ar:augmented reality)的技术发达,能够向通过摄像镜头所拍摄的图像附加各种信息。为了实现这样的各种功能,在智能手机的许多机型中安装有摄像机。
4.为了精细地拍摄被摄体,或关于被摄体取得更多的信息,需要高像素的摄像元件以及高分辨率的摄像镜头。作为用于实现摄像镜头的高分辨率化的方法之一,有与各像差的修正的难易度对应地增加构成摄像镜头的透镜的枚数的方法。但是,轻易地增加透镜枚数容易造成摄像镜头的大型化。在摄像镜头的开发中,需要在抑制光学全长(total track length)的伸长的同时提高分辨率。
5.在由9枚透镜构成的镜头结构中,由于构成摄像镜头的透镜的枚数多,因此设计上的自由度高,能够良好地修正各像差。作为9枚结构的摄像镜头,例如已知专利文献1所记载的摄像镜头。
6.在专利文献1中记载了由具有正的光焦度的第1透镜组和具有正的光焦度的第2透镜组构成的摄像镜头。第1透镜组具有正的第1透镜、正的第2透镜、负的第3透镜、负的第4透镜、正的第5透镜以及正的第6透镜共6枚透镜。第2透镜组具有负的第7透镜、负的第8透镜以及正的第9透镜共3枚透镜。在该第2透镜组中,第7透镜的像面侧的面形成为凹形状,第8透镜形成为将凹面朝向物体侧的弯月形状。在该专利文献1记载的摄像镜头中,通过将第7透镜的焦距相对于第8透镜的焦距的比抑制在一定的范围内,良好地修正各像差。
7.根据上述专利文献1记载的摄像镜头,能够期待比较良好的像差修正。但是,该摄像镜头,相对于整个镜头系统的焦距,光学全长长,因此不适合于安装到内置于智能手机等的小型的摄像机中。在专利文献1记载的摄像镜头中,难以在实现小型化的同时实现良好的像差修正。
8.此外,这样的问题不是装入到智能手机、便携电话机中的摄像镜头所特有的问题,而是装入到数码静物相机、便携信息终端、安防摄像机、车载摄像机、网络摄像机等比较小型的摄像机中的摄像镜头中共通的问题。
9.专利文献1:日本特开2018
‑
156011号公报
技术实现要素:
10.本发明的目的在于:提供一种摄像镜头,其能够实现摄像镜头的小型化和良好的像差修正的兼顾。
11.本发明的摄像镜头,在摄像元件上形成被摄体图像,其从物体侧向像面侧依次配置具有正的光焦度的第1透镜、具有正的光焦度的第2透镜、具有负的光焦度的第3透镜、具有正的光焦度的第4透镜、第5透镜、第6透镜、第7透镜、第8透镜和具有负的光焦度的第9透镜。第9透镜具有形成为具有拐点的非球面形状的像面侧的面。
12.通过将9枚透镜中配置在物体侧的4枚透镜的光焦度的排列设为“正正负正”,能够在良好地修正色像差和球面像差等各像差的同时,实现摄像镜头的小型化。在本发明的摄像镜头中,将具有正的光焦度的第1透镜配置在最靠物体侧,并在该第1透镜的像面侧配置同样具有正的光焦度的第2透镜。根据这样通过2枚透镜分担正的光焦度的镜头结构,能够抑制伴随摄像镜头的小型化的第1透镜的光焦度的增大,因此能够适当地实现摄像镜头的小型化。另外,在第1透镜中,最薄部与最厚部的比例即厚度比被抑制得小,因此能够将成像性能的劣化对于在制造摄像镜头时产生的偏心(decenter)、倾斜等的敏感度、所谓的制造误差灵敏度抑制在良好的范围内。而且,由于厚度比小,所以透镜成形时的材料的流动性提高,因此还能够降低第1透镜的制造成本。
13.在本发明中,第2透镜具有正的光焦度。因此,通过在第2透镜的像面侧配置具有负的光焦度的第3透镜,能够良好地修正色像差。进而,通过在第3透镜的像面侧配置具有正的光焦度的第4透镜,能够更良好地修正色像差和球面像差。
14.在本发明的摄像镜头中,通过将配置在最靠像面侧的第9透镜的光焦度设为负,能够在良好地修正图像周边部的像面弯曲和畸变的同时确保后焦距。另外,通过将该第9透镜的像面侧的面形成为具有拐点的非球面形状,能够在将从摄像镜头出射的光线向摄像元件的像面的入射角度抑制在主光线角度(cra:chief ray angle)的范围内的同时,良好地修正近轴和图像周边部的各像差。
15.此外,在本发明中,“透镜”是指具有光焦度的光学元件。因此,改变光的行进方向的棱镜、平板的滤光片等光学元件并不包含在发明的“透镜”中,可以将这些光学元件适当地配置在摄像镜头的前后、各透镜之间。
16.在上述结构的摄像镜头中,在将整个镜头系统的焦距设为f,将第1透镜、第2透镜以及第3透镜的合成焦距设为f123时,优选满足以下的条件式(1)。
17.1<f123/f<2
ꢀꢀꢀ
(1)
18.通过满足条件式(1),能够在良好地修正球面像差的同时,减小光学全长(total track length)相对于像面的最大像高的比,进而能够适当地实现摄像镜头的小型化。
19.在上述结构的摄像镜头中,在将整个镜头系统的焦距设为f,将第1透镜的焦距设为f1时,优选满足以下的条件式(2)。
20.5<f1/f<25
ꢀꢀꢀ
(2)
21.在摄像镜头的小型化时,优选增强配置在最靠物体侧的第1透镜的光焦度。但是,如果过于增强第1透镜具有的正的光焦度,则难以修正各像差。通过满足条件式(2),能够在实现摄像镜头的小型化的同时,适当地抑制各像差的产生。
22.在上述结构的摄像镜头中,在将第1透镜的焦距设为f1,将第2透镜的焦距设为f2
时,优选满足以下的条件式(3)。
23.0.02<f2/f1<0.15
ꢀꢀꢀ
(3)
24.通过满足条件式(3),能够在确保后焦距的同时,适当地实现摄像镜头的小型化。另外,通过满足条件式(3),能够平衡良好地修正彗差、像面弯曲以及畸变。
25.在上述结构的摄像镜头中,在将整个镜头系统的焦距设为f,将第2透镜和第3透镜的合成焦距设为f23时,优选满足以下的条件式(4)。
26.1<f23/f<2
ꢀꢀꢀ
(4)
27.通过满足条件式(4),能够在实现摄像镜头的小型化的同时,良好地修正球面像差。
28.在上述结构的摄像镜头中,在将第2透镜的焦距设为f2,将第3透镜的焦距设为f3时,优选满足以下的条件式(5)。
29.‑
1.0<f2/f3<
‑
0.2
ꢀꢀꢀ
(5)
30.通过满足条件式(5),能够在实现摄像镜头的小型化的同时,良好地修正色像差和球面像差。
31.在上述结构的摄像镜头中,在将整个镜头系统的焦距设为f,将第3透镜的焦距设为f3时,优选满足以下的条件式(6)。
32.‑
2.5<f3/f<
‑
0.5
ꢀꢀꢀ
(6)
33.在本发明的摄像镜头中,第3透镜作为像差修正透镜,主要起到用于修正通过第2透镜产生的各像差的功能。通过满足条件式(6),能够在实现摄像镜头的小型化的同时,良好地修正色像差。
34.在上述结构的摄像镜头中,在将整个镜头系统的焦距设为f,将第3透镜和第4透镜的合成焦距设为f34时,优选满足以下的条件式(7)。
35.‑
5<f34/f<
‑1ꢀꢀꢀ
(7)
36.通过满足条件式(7),能够在实现摄像镜头的小型化的同时,良好地修正色像差。
37.在上述结构的摄像镜头中,在将整个镜头系统的焦距设为f,将第3透镜与第4透镜之间的光轴上的距离设为d34时,优选满足以下的条件式(8)。
38.0.05<d34/f<0.1
ꢀꢀꢀ
(8)
39.通过满足条件式(8),能够在将从摄像镜头出射的光线向像面的入射角度抑制在cra的范围内的同时,良好地修正像面弯曲和畸变。
40.在上述结构的摄像镜头中,优选第3透镜具有在近轴处将凹面朝向像面侧的形状,在透镜周边部将凹面朝向像面侧的形状的像面侧的面。另外,优选第4透镜具有作为具有拐点的非球面形状,在近轴处将凸面朝向物体侧的形状的物体侧的面。如果将第3透镜和第4透镜形成为这样的形状,则在镜头周边部凹面相对,因此能够在适当地实现摄像镜头的小型化的同时,良好地修正像面弯曲。
41.在上述结构的摄像镜头中,优选将第8透镜形成为物体侧的面的曲率半径和像面侧的面的曲率半径都为正的形状、或这些曲率半径都为负的形状、即在近轴处为弯月透镜的形状。
42.如果第8透镜的光焦度变强,则大多情况下难以修正球面像差、像面弯曲以及畸变。通过将第8透镜形成为在近轴处为弯月透镜的形状,能够良好地修正球面像差、像面弯
曲以及畸变。
43.在上述结构的摄像镜头中,在将第8透镜形成为在近轴处为弯月透镜的形状的情况下,在将第8透镜的物体侧的面的曲率半径设为r8f,将第8透镜的像面侧的面的曲率半径设为r8r时,优选满足以下的条件式(9)。
44.0.5<r8f/r8r<5
ꢀꢀꢀ
(9)
45.通过满足条件式(9),能够使第8透镜的概形接近平坦形状、即下陷量少的形状,因此能够通过提高制造上的加工性来实现摄像镜头的制造成本的抑制。另外,通过满足条件式(9),能够良好地修正像面弯曲和畸变。
46.在上述结构的摄像镜头中,优选将第8透镜形成为物体侧的面的曲率半径和像面侧的面的曲率半径都为正的形状、即在近轴处为将凸面朝向物体侧的弯月透镜的形状,并且两面都形成为具有拐点的非球面形状。
47.通过将第8透镜形成为在近轴处为将凸面朝向物体侧的弯月透镜的形状,能够在实现摄像镜头的小型化的同时,良好地修正球面像差、像面弯曲以及畸变。另外,通过将第8透镜的物体侧的面和像面侧的面的两面形成为具有拐点的非球面形状,能够将从摄像镜头出射的光线向摄像元件的像面的入射角度适当地抑制在cra的范围内。
48.在上述结构的摄像镜头中,在将第7透镜的光轴上的厚度设为t7,将第8透镜的光轴上的厚度设为t8时,优选满足以下的条件式(10)。
49.0.5<t8/t7<3
ꢀꢀꢀ
(10)
50.通过满足条件式(10),能够在实现摄像镜头的小型化的同时,确保后焦距。
51.在上述结构的摄像镜头中,在将整个镜头系统的焦距设为f,将第8透镜与第9透镜之间的光轴上的距离设为d89时,优选满足以下的条件式(11)。
52.0.02<d89/f<0.15
ꢀꢀꢀ
(11)
53.如果谋求降低摄像镜头的高度,则在摄像镜头中具有越是配置在像面侧的透镜,则有效直径越大的倾向。在配置了这样的有效直径大的多枚透镜的情况下,大多在透镜之间产生干扰,或透镜间隔过窄而难以制造、组装摄像镜头。通过满足条件式(11),能够在适度地确保第8透镜与第9透镜之间的光轴上的距离的同时,确保后焦距。另外,通过满足条件式(11),能够在实现摄像镜头的小型化的同时,平衡良好地修正像面弯曲、像散以及畸变。
54.在上述结构的摄像镜头中,在将第8透镜和第9透镜的合成焦距设为f89时,优选满足以下的条件式(12)。
55.‑
5<f89/f<
‑
0.1
ꢀꢀꢀ
(12)
56.通过满足条件式(12),能够在确保后焦距的同时,良好地修正像面弯曲和畸变。另外,能够适当地将从摄像镜头出射的光线向像面的入射角度抑制在cra的范围内。
57.在上述结构的摄像镜头中,在将整个镜头系统的焦距设为f,将第9透镜的像面侧的面的近轴曲率半径设为r9r时,优选满足以下的条件式(13)。
58.0.2<r9r/f<0.6
ꢀꢀꢀ
(13)
59.第9透镜的像面侧的面是在摄像镜头中处于最靠像面侧的位置的面。根据该面的光焦度的大小,像散、彗差以及畸变的修正难度不同。通过满足条件式(13),能够在实现摄像镜头的小型化的同时确保后焦距。另外,通过满足条件式(13),能够平衡良好地修正像散、彗差以及畸变。
60.在上述结构的摄像镜头中,在将整个镜头系统的焦距设为f,将第9透镜的焦距设为f9时,优选满足以下的条件式(14)。
61.‑
3.5<f9/f<
‑
0.2
ꢀꢀꢀ
(14)
62.通过满足条件式(14),能够在确保后焦距的同时,良好地修正像面弯曲和畸变。另外,能够将从摄像镜头出射的光线向像面的入射角度适当地抑制在cra的范围内。
63.在上述结构的摄像镜头中,为了良好地修正轴上色像差和倍率色像差,在将第2透镜的阿贝数设为vd2,将第3透镜的阿贝数设为vd3时,优选满足以下的条件式(15)、(16)。
64.35<vd2<75
ꢀꢀꢀ
(15)
65.15<vd3<35
ꢀꢀꢀ
(16)
66.在上述结构的摄像镜头中,为了良好地修正倍率色像差,在将第9透镜的阿贝数设为vd9时,优选满足以下的条件式(17)。
67.35<vd9<75
ꢀꢀꢀ
(17)
68.本发明的摄像镜头,在将整个镜头系统的焦距设为f,将从第1透镜的物体侧的面到像面的光轴上的距离设为tl时,优选满足以下的条件式(18)。通过满足该条件式(18),能够适当地实现摄像镜头的小型化。
69.1.0<tl/f<1.4
ꢀꢀꢀ
(18)
70.此外,通常在摄像镜头和像面之间配置红外线截止滤光片、保护玻璃等插入物的情况较多,但在本说明书中,关于这些插入物的光轴上的距离,使用空气换算长度。
71.此外,近年来,伴随着安装摄像镜头的智能手机等的小型化,摄像元件正在大型化。特别在内置于智能手机等薄型的便携设备中的摄像镜头中,需要将摄像镜头收纳于有限的空间内,因此对于与摄像元件的大小对应的摄像镜头的光轴方向的长度有严格的限制。因此,在将从第1透镜的物体侧的面到像面的光轴上的距离设为tl,将最大像高设为hmax时,本技术的摄像镜头优选满足以下的条件式(19)。
72.1.0<tl/hmax<1.8
ꢀꢀꢀ
(19)
73.在上述结构的摄像镜头中,在第7透镜的光焦度为正的情况下,在将整个镜头系统的焦距设为f,将第7透镜的焦距设为f7时,优选满足以下的条件式(20)。
74.0.5<f7/f<3
ꢀꢀꢀ
(20)
75.通过满足条件式(20),能够在实现摄像镜头的小型化的同时,平衡良好地修正像面弯曲、畸变以及色像差。
76.在上述结构的摄像镜头中,在第7透镜的光焦度为负的情况下,在将整个镜头系统的焦距设为f,将第7透镜的焦距设为f7时,优选满足以下的条件式(21)。
77.‑
25<f7/f<
‑5ꢀꢀꢀ
(21)
78.通过满足条件式(21),能够在实现摄像镜头的小型化的同时,平衡良好地修正像面弯曲、畸变以及色像差。
79.在上述结构的摄像镜头中,在第8透镜的光焦度为正的情况下,在将第8透镜的焦距设为f8,将第9透镜的焦距设为f9时,优选满足以下的条件式(22)。
80.‑
25<f8/f9<
‑5ꢀꢀꢀ
(22)
81.通过满足条件式(22),能够在实现摄像镜头的小型化的同时,平衡良好地修正像面弯曲、畸变以及色像差。
82.在上述结构的摄像镜头中,在第8透镜的光焦度为负的情况下,在将第8透镜的焦距设为f8,将第9透镜的焦距设为f9时,优选满足以下的条件式(23)。
83.1<f8/f9<8
ꢀꢀꢀ
(23)
84.通过满足条件式(23),能够在实现摄像镜头的小型化的同时,平衡良好地修正像面弯曲、畸变以及色像差。
85.在本发明的摄像镜头中,优选将从第1透镜到第9透镜的各透镜隔着空气间隔而排列。通过隔着空气间隔排列各透镜,本发明的摄像镜头成为一枚接合透镜都不包含的镜头结构。在这样的镜头结构中,容易由塑料材料形成构成摄像镜头的全部9枚透镜,因此能够适当地抑制摄像镜头的制造成本。
86.在本发明的摄像镜头中,优选将从第1透镜到第9透镜的各透镜的两面形成为非球面形状。通过将各透镜的两面形成为非球面形状,从镜头的光轴附近到周边部,能够更良好地修正各像差。特别能够良好地修正镜头周边部的各像差。
87.在上述结构的摄像镜头中,优选将第1透镜形成为将凸面朝向物体侧的形状。通过将第1透镜形成为这样的形状,能够适当地实现摄像镜头的小型化。
88.在上述结构的摄像镜头中,优选将第8透镜和第9透镜中的至少2个面形成为具有拐点的非球面形状。除了第9透镜的像面侧的面以外,还设置一个以上的具有拐点的非球面形状的透镜面,由此能够更适当地将从摄像镜头出射的光线向像面的入射角度抑制在cra的范围内,并且能够更良好地修正图像周边部的各像差。
89.本发明的摄像镜头,在将视场角设为2ω时,优选满足70
°
≤2ω。通过满足本条件式,能够实现摄像镜头的广角化,适当地实现摄像镜头的小型化和广角化的兼顾。
90.但是,在高像素的摄像元件中,各像素的感光面积减小,因此存在所拍摄的图像变暗的倾向。作为用于对其进行修正的方法,存在使用电路来提高摄像元件的感光灵敏度的方法。但是,若感光灵敏度提高,则不直接有助于图像的形成的噪声成分也被放大。因此,为了即使不设置电路等也得到足够明亮的图像,在上述结构的摄像镜头中,在将整个镜头系统的焦距设为f,将摄像镜头的入射光瞳直径设为dep时,优选满足以下的条件式(24)。
91.f/dep<2.4
ꢀꢀꢀ
(24)
92.此外,在本发明中,如上述那样使用曲率半径的符号来确定透镜的形状。曲率半径是正还是负依照普通的定义,即依照以下定义:将光的前进方向设为正,在从透镜面看来曲率的中心位于像面侧的情况下将曲率半径设为正,在曲率的中心位于物体侧的情况下将曲率半径设为负。由此,“曲率半径为正的物体侧的面”是指物体侧的面为凸面,“曲率半径为负的物体侧的面”是指物体侧的面为凹面。另外,“曲率半径为正的像面侧的面”是指像面侧的面为凹面,“曲率半径为负的像面侧的面”是指像面侧的面为凸面。此外,本说明书中的曲率半径是指近轴的曲率半径,有时不符合镜头截面图中的透镜的概形。
93.根据本发明的摄像镜头,能够提供一种小型的摄像镜头,其具有良好地修正了各像差的高分辨率,并且特别适合于装入小型的摄像机。
附图说明
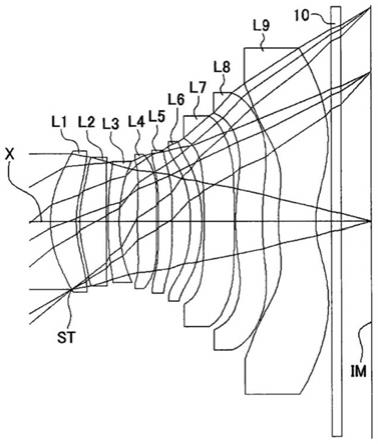
94.图1是表示数值实施例1的摄像镜头的概要结构的截面图。
95.图2是表示图1所示的摄像镜头的横像差的像差图。
96.图3是表示图1所示的摄像镜头的球面像差、像散、畸变的像差图。
97.图4是表示数值实施例2的摄像镜头的概要结构的截面图。
98.图5是表示图4所示的摄像镜头的横像差的像差图。
99.图6是表示图4所示的摄像镜头的球面像差、像散、畸变的像差图。
100.图7是表示数值实施例3的摄像镜头的概要结构的截面图。
101.图8是表示图7所示的摄像镜头的横像差的像差图。
102.图9是表示图7所示的摄像镜头的球面像差、像散、畸变的像差图。
103.图10是表示数值实施例4的摄像镜头的概要结构的截面图。
104.图11是表示图10所示的摄像镜头的横像差的像差图。
105.图12是表示图10所示的摄像镜头的球面像差、像散、畸变的像差图。
106.图13是表示数值实施例5的摄像镜头的概要结构的截面图。
107.图14是表示图13所示的摄像镜头的横像差的像差图。
108.图15是表示图13所示的摄像镜头的球面像差、像散、畸变的像差图。
109.图16是表示数值实施例6的摄像镜头的概要结构的截面图。
110.图17是表示图16所示的摄像镜头的横像差的像差图。
111.图18是表示图16所示的摄像镜头的球面像差、像散、畸变的像差图。
112.图19是表示数值实施例7的摄像镜头的概要结构的截面图。
113.图20是表示图19所示的摄像镜头的横像差的像差图。
114.图21是表示图19所示的摄像镜头的球面像差、像散、畸变的像差图。
115.图22是表示数值实施例8的摄像镜头的概要结构的截面图。
116.图23是表示图22所示的摄像镜头的横像差的像差图。
117.图24是表示图22所示的摄像镜头的球面像差、像散、畸变的像差图。
118.图25是表示数值实施例9的摄像镜头的概要结构的截面图。
119.图26是表示图25所示的摄像镜头的横像差的像差图。
120.图27是表示图25所示的摄像镜头的球面像差、像散、畸变的像差图。
121.图28是表示数值实施例10的摄像镜头的概要结构的截面图。
122.图29是表示图28所示的摄像镜头的横像差的像差图。
123.图30是表示图28所示的摄像镜头的球面像差、像散、畸变的像差图。
124.图31是表示数值实施例11的摄像镜头的概要结构的截面图。
125.图32是表示图31所示的摄像镜头的横像差的像差图。
126.图33是表示图31所示的摄像镜头的球面像差、像散、畸变的像差图。
127.图34是表示数值实施例12的摄像镜头的概要结构的截面图。
128.图35是表示图34所示的摄像镜头的横像差的像差图。
129.图36是表示图34所示的摄像镜头的球面像差、像散、畸变的像差图。
130.图37是表示数值实施例13的摄像镜头的概要结构的截面图。
131.图38是表示图37所示的摄像镜头的横像差的像差图。
132.图39是表示图37所示的摄像镜头的球面像差、像散、畸变的像差图。
133.附图标记说明
134.x:光轴;
135.st:孔径光阑;
136.l1:第1透镜;
137.l2:第2透镜;
138.l3:第3透镜;
139.l4:第4透镜;
140.l5:第5透镜;
141.l6:第6透镜;
142.l7:第7透镜;
143.l8:第8透镜;
144.l9:第9透镜;
145.10:滤光片;
146.im:像面。
具体实施方式
147.以下,参照附图详细说明对本发明具体化所得的一个实施方式。
148.图1、图4、图7、图10、图13、图16、图19、图22、图25、图28、图31、图34以及图37是表示本实施方式的数值实施例1~13的摄像镜头的概要结构的截面图。任意一个数值实施例的基本镜头结构都相同,因此,在此参照数值实施例1的截面图来说明本实施方式的摄像镜头。
149.如图1所示,从物体侧向像面侧依次配置具有正的光焦度的第1透镜l1、具有正的光焦度的第2透镜l2、具有负的光焦度的第3透镜l3、具有正的光焦度的第4透镜l4、第5透镜l5、第6透镜l6、第7透镜l7、第8透镜l8、具有负的光焦度的第9透镜l9来构成摄像镜头。在第9透镜l9与摄像元件的像面im之间配置滤光片10。此外,可以省略滤光片10。
150.第1透镜l1具有物体侧的面的曲率半径r1和像面侧的面的曲率半径r2都为正的形状。第1透镜l1是在近轴处为将凸面朝向物体侧的弯月透镜的形状。第1透镜l1的形状并不限于本数值实施例1的形状。第1透镜l1的形状只要是第1透镜l1的光焦度为正的形状即可。作为第1透镜l1的形状,除了本数值实施例1的形状以外,也可以是曲率半径r1和r2都为负的形状、曲率半径r1为正而曲率半径r2为负的形状。前者是在近轴处将凹面朝向物体侧的弯月透镜的形状,后者是在近轴处为双凸透镜的形状。从实现摄像镜头的小型化这一点出发,优选将第1透镜l1形成为曲率半径r1为正的形状。
151.在本数值实施例1中,在第1透镜l1的物体侧的面设置有孔径光阑st。孔径光阑st的位置并不限于本数值实施例1的位置。也可以在第1透镜l1的物体侧设置孔径光阑st。或者,也可以将孔径光阑st设置在第1透镜l1与第2透镜l2之间、第2透镜l2与第3透镜l3之间或者第3透镜l3与第4透镜l4之间等。
152.第2透镜l2具有物体侧的面的曲率半径r3和像面侧的面的曲率半径r4都为正的形状。第2透镜l2是在近轴处为将凸面朝向物体侧的弯月透镜的形状。第2透镜l2的形状并不限于本数值实施例1的形状。数值实施例2、4、5以及10是曲率半径r3为正而曲率半径r4为负的形状、即在近轴处为双凸透镜的形状的例子。第2透镜l2的形状只要是第2透镜l2的光焦度为正的形状即可。作为第2透镜l2的形状,除此以外,也可以是曲率半径r3和r4都为负的
形状、即在近轴处为将凹面朝向物体侧的弯月透镜的形状。从摄像镜头的小型化的观点出发,优选将第2透镜l2形成为曲率半径r3为正的形状。
153.第3透镜l3具有物体侧的面的曲率半径r5和像面侧的面的曲率半径r6都为正的形状。第3透镜l3是在近轴处为将凸面朝向物体侧的弯月透镜的形状。进而,本实施方式中的第3透镜l3的像面侧的面,在透镜周边部具有将凹面朝向像面侧的形状。此外,第3透镜l3的形状并不限于本数值实施例1的形状。作为第3透镜l3的形状,既可以是曲率半径r5为负而曲率半径r6为正的形状、即在近轴处为双凹透镜的形状,也可以是曲率半径r5和r6都为负的形状、即在近轴处为将凹面朝向物体侧的弯月透镜的形状。第3透镜l3的形状只要是第3透镜l3的光焦度为负的形状即可。
154.第4透镜l4具有物体侧的面的曲率半径r7和像面侧的面的曲率半径r8都为正的形状。第4透镜l4是在近轴处为将凸面朝向物体侧的弯月透镜的形状。进而,本实施方式的第4透镜l4具备具有拐点的非球面形状的物体侧的面。由此,该第4透镜l4的物体侧的面是在近轴处将凸面朝向物体侧的形状,在透镜周边部将凹面朝向物体侧的形状。此外,第4透镜l4的形状并不限于本数值实施例1的形状。数值实施例9、10、11以及13是曲率半径r7为正而曲率半径r8为负的形状、即在近轴处为双凸透镜的形状的例子。第4透镜l4的形状只要是第4透镜l4的光焦度为正的形状即可。
155.第5透镜l5具有正的光焦度。该第5透镜l5的光焦度并不限于正。在数值实施例7~13中表示第5透镜l5的光焦度为负的镜头结构的例子。
156.第5透镜l5具有物体侧的面的曲率半径r9为正而像面侧的面的曲率半径r10为负的形状。第5透镜l5是在近轴处为双凸透镜的形状。第5透镜l5的形状并不限于本数值实施例1的形状。数值实施例3、7、8、11以及12是曲率半径r9和曲率半径r10都为正的形状、即在近轴处为将凸面朝向物体侧的弯月透镜的形状的例子。数值实施例9、10以及13是曲率半径r9和曲率半径r10都为负的形状、即在近轴处为将凹面朝向物体侧的弯月透镜的形状的例子。除此以外,作为第5透镜l5的形状,也可以是曲率半径r9为负而曲率半径r10为正的形状、即在近轴处为双凹透镜的形状。
157.第6透镜l6具有正的光焦度。该第6透镜l6的光焦度并不限于正。在数值实施例3~6以及11~13中表示第6透镜l6的光焦度为负的镜头结构的例子。
158.第6透镜l6具有物体侧的面的曲率半径r11和像面侧的面的曲率半径r12都为负的形状。第6透镜l6是在近轴处为将凹面朝向物体侧的弯月透镜的形状。第6透镜l6的形状并不限于本数值实施例1的形状。数值实施例3、4以及11是曲率半径r11为负而曲率半径r12为正的形状、即在近轴处为双凹透镜的形状的例子。数值实施例7是曲率半径r11和r12都为正的形状、即在近轴处为将凸面朝向物体侧的弯月透镜的形状的例子。数值实施例8是曲率半径r11为正而曲率半径r12为负的形状、即在近轴处为双凸透镜的形状的例子。
159.第7透镜l7具有负的光焦度。该第7透镜l7的光焦度并不限于负。在数值实施例3、4、7、8、11以及12中表示第7透镜l7的光焦度为正的镜头结构的例子。
160.第7透镜l7具有物体侧的面的曲率半径r13和像面侧的面的曲率半径r14都为负的形状。第7透镜l7是在近轴处为将凹面朝向物体侧的弯月透镜的形状。另外,本实施方式的第7透镜l7,物体侧的面是在透镜周边部将凹面朝向物体侧的形状,像面侧的面具有在透镜周边部将凸面朝向像面侧的形状。通过第7透镜l7的这样的形状,能够在良好地修正倍率色
像差、像面弯曲的同时,将从摄像镜头出射的光线向像面im的入射角度适当地抑制在cra的范围内。此外,第7透镜l7的形状并不限于本数值实施例1的形状。数值实施例3、4、8、11以及12是曲率半径r13为正而曲率半径r14为负的形状、即在近轴处为双凸透镜的形状的例子。第7透镜l7的形状也可以是曲率半径r13和曲率半径r14都为正的形状、即在近轴处为将凸面朝向物体侧的弯月透镜的形状。除此以外,作为第7透镜l7的形状,也可以是曲率半径r13为负而曲率半径r14为正的形状、即在近轴处为双凹透镜的形状。
161.第8透镜l8具有正的光焦度。该第8透镜l8的光焦度并不限于正。在数值实施例2、4、6、8、10以及12中表示第8透镜l8的光焦度为负的镜头结构的例子。
162.第8透镜l8具有物体侧的面的曲率半径r15(=r8f)和像面侧的面的曲率半径r16(=r8r)都为正的形状。第8透镜l8是在近轴处为将凸面朝向物体侧的弯月透镜的形状。另外,本实施方式的第8透镜l8,物体侧的面是在透镜周边部将凹面朝向物体侧的形状,像面侧的面具有在透镜周边部将凸面朝向像面侧的形状。进而,第8透镜l8的两面具备具有拐点的非球面形状。由此,本实施方式的第8透镜l8在近轴处是将凸面朝向物体侧的弯月形状,在透镜周边部是将凹面朝向物体侧的弯月形状。通过第8透镜l8的这样的形状,能够在良好地修正倍率色像差、像面弯曲的同时,将从摄像镜头出射的光线向像面im的入射角度适当地抑制在cra的范围内。此外,第8透镜l8的形状并不限于本数值实施例1的形状。第8透镜l8的形状也可以是曲率半径r15和r16都为负的形状、即在近轴处为将凹面朝向物体侧的弯月透镜的形状。除此以外,第8透镜l8的形状也可以是曲率半径r15为正而曲率半径r16为负的形状、曲率半径r15为负而曲率半径r16为正的形状。
163.第9透镜l9具有物体侧的面的曲率半径r17和像面侧的面的曲率半径r18(=r9r)都为正的形状。第9透镜l9是在近轴处为将凸面朝向物体侧的弯月透镜的形状。第9透镜l9的形状并不限于本数值实施例1的形状。数值实施例3、7以及11是曲率半径r17为负而曲率半径r18为正的形状、即在近轴处为双凹透镜的形状的例子。除此以外,作为第9透镜l9的形状,也可以是曲率半径r17和r18都为负的形状。第9透镜l9的形状只要是第9透镜l9的光焦度为负的形状即可。
164.另外,在上述第9透镜l9中,像面侧的面形成为具有拐点的非球面形状。在此,拐点是指在曲线上曲率的符号变化的点,是指在透镜面上的曲线上弯曲的方向变化的点。此外,本实施方式的摄像镜头的第9透镜l9的像面侧的面是具有极点的非球面形状。通过第9透镜l9具有的这样的形状,不只是轴上的色像差,还能够良好地修正轴外的倍率色像差,并且将从摄像镜头出射的光线向像面im的入射角度适当地抑制在cra的范围内。在本数值实施例1的摄像镜头中,第8透镜l8和第9透镜l9的两面是具有拐点的非球面形状,因此,能够在将从摄像镜头出射的光线的入射角度抑制在cra的范围内的同时,更良好地修正图像周边部的各像差。此外,根据所要求的光学性能、摄像镜头的小型化的程度,也可以将第8透镜l8和第9透镜l9的透镜面中的除了第9透镜l9的像面侧的面以外的其他透镜面形成为没有拐点的非球面形状或球面。
165.本实施方式的摄像镜头满足以下所示的条件式(1)~(19)以及(24)。
166.1<f123/f<2
ꢀꢀꢀ
(1)
167.5<f1/f<25
ꢀꢀꢀ
(2)
168.0.02<f2/f1<0.15
ꢀꢀꢀ
(3)
169.1<f23/f<2
ꢀꢀꢀ
(4)
170.‑
1.0<f2/f3<
‑
0.2
ꢀꢀꢀ
(5)
171.‑
2.5<f3/f<
‑
0.5
ꢀꢀꢀ
(6)
172.‑
5<f34/f<
‑1ꢀꢀꢀ
(7)
173.0.05<d34/f<0.1
ꢀꢀꢀ
(8)
174.0.5<r8f/r8r<5
ꢀꢀꢀ
(9)
175.0.5<t8/t7<3
ꢀꢀꢀ
(10)
176.0.02<d89/f<0.15
ꢀꢀꢀ
(11)
177.‑
5<f89/f<
‑
0.1
ꢀꢀꢀ
(12)
178.0.2<r9r/f<0.6
ꢀꢀꢀ
(13)
179.‑
3.5<f9/f<
‑
0.2
ꢀꢀꢀ
(14)
180.35<vd2<75
ꢀꢀꢀ
(15)
181.15<vd3<35
ꢀꢀꢀ
(16)
182.35<vd9<75
ꢀꢀꢀ
(17)
183.1.0<tl/f<1.4
ꢀꢀꢀ
(18)
184.1.0<tl/hmax<1.8
ꢀꢀꢀ
(19)
185.f/dep<2.4
ꢀꢀꢀ
(24)
186.其中,
187.f:整个镜头系统的焦距
188.f1:第1透镜l1的焦距
189.f2:第2透镜l2的焦距
190.f3:第3透镜l3的焦距
191.f9:第9透镜l9的焦距
192.f23:第2透镜l2和第3透镜l3的合成焦距
193.f34:第3透镜l3和第4透镜l4的合成焦距
194.f89:第8透镜l8和第9透镜l9的合成焦距
195.f123:第1透镜l1、第2透镜l2以及第3透镜l3的合成焦距
196.t7:第7透镜l7的光轴上的厚度
197.t8:第8透镜l8的光轴上的厚度
198.vd2:第2透镜l2的阿贝数
199.vd3:第3透镜l3的阿贝数
200.vd9:第9透镜l9的阿贝数
201.r8f:第8透镜l8的物体侧的面的近轴曲率半径
202.r8r:第8透镜l8的像面侧的面的近轴曲率半径
203.r9r:第9透镜l9的像面侧的面的近轴曲率半径
204.d34:第3透镜l3与第4透镜l4之间的光轴上的距离
205.d89:第8透镜l8与第9透镜l9之间的光轴上的距离
206.hmax:最大像高
207.tl:从第1透镜l1的物体侧的面到像面im的光轴x上的距离
208.(滤光片10为空气换算长度)
209.dep:入射光瞳直径
210.如数值实施例3、4、7、8、11以及12所示的镜头结构那样,在第7透镜l7具有正的光焦度的情况下,还满足以下的条件式(20)。
211.0.5<f7/f<3
ꢀꢀꢀ
(20)
212.其中,f7:第7透镜l7的焦距
213.如数值实施例1、2、5、6、9、10以及13所示的镜头结构那样,在第7透镜l7具有负的光焦度的情况下,还满足以下的条件式(21)。
214.‑
25<f7/f<
‑5ꢀꢀꢀ
(21)
215.如数值实施例1、3、5、7、9、11以及13所示的镜头结构那样,在第8透镜l8具有正的光焦度的情况下,还满足以下的条件式(22)。
216.‑
25<f8/f9<
‑5ꢀꢀꢀ
(22)
217.其中,f8:第8透镜l8的焦距
218.如数值实施例2、4、6、8、10以及12所示的镜头结构那样,在第8透镜l8为负的情况下,还满足以下的条件式(23)。
219.1<f8/f9<8
ꢀꢀꢀ
(23)
220.其中,f8:第8透镜l8的焦距
221.此外,不需要满足上述各条件式的全部,通过单独地分别满足上述各条件式,能够分别得到与各条件式对应的作用效果。
222.在本实施方式中,用非球面形成了各透镜的透镜面。通过下式表示这些非球面的非球面式。
223.[数学式1]
[0224][0225]
其中,
[0226]
z:光轴方向的距离
[0227]
h:与光轴垂直的方向的离开光轴的距离
[0228]
c:近轴曲率(=1/r,r:近轴曲率半径)
[0229]
k:圆锥常数
[0230]
an:第n次的非球面系数
[0231]
接着,表示本实施方式的摄像镜头的数值实施例。在各数值实施例中,f表示整个镜头系统的焦距,fno表示f值,ω表示半视场角。i表示从物体侧开始数的面编号,r表示近轴曲率半径,d表示光轴上的透镜面之间的距离(面间隔),nd表示基准波长588nm下的折射率,vd表示该基准波长下的阿贝数。此外,对面编号附加了*(星号)的符号的面表示是非球面。
[0232]
数值实施例1
[0233]
基本镜头数据
[0234]
【表1】
[0235]
f=5.71mm fno=1.9 ω=39.5
°
[0236][0237]
f123=7.381mm
[0238]
f23=7.951mm
[0239]
f34=
‑
10.668mm
[0240]
f89=
‑
12.478mm
[0241]
t7=0.675mm
[0242]
t8=0.589mm
[0243]
d34=0.407mm
[0244]
d89=0.356mm
[0245]
tl=7.051mm
[0246]
hmax=4.71mm
[0247]
dep=3.021mm
[0248]
【表2】
[0249]
非球面数据
[0250]
ika4a6a8a10a12a14a161
‑
8.488e
‑
01
‑
2.138e
‑
045.395e
‑
03
‑
8.577e
‑
037.189e
‑
03
‑
3.548e
‑
038.214e
‑
04
‑
7.622e
‑
052
‑
2.580e 00
‑
2.883e
‑
02
‑
9.299e
‑
03
‑
4.908e
‑
041.258e
‑
03
‑
2.781e
‑
046.475e
‑
04
‑
2.062e
‑
04
3
‑
5.621e
‑
02
‑
4.828e
‑
02
‑
1.448e
‑
022.513e
‑
034.480e
‑
041.764e
‑
03
‑
3.038e
‑
04
‑
4.637e
‑
0540.000e 004.849e
‑
03
‑
9.888e
‑
031.056e
‑
033.776e
‑
03
‑
2.060e
‑
033.208e
‑
049.050e
‑
0552.476e
‑
013.576e
‑
036.534e
‑
03
‑
9.072e
‑
034.643e
‑
03
‑
3.484e
‑
031.773e
‑
03
‑
2.892e
‑
046
‑
1.322e 00
‑
3.181e
‑
041.209e
‑
02
‑
6.876e
‑
03
‑
2.290e
‑
041.044e
‑
032.350e
‑
04
‑
1.507e
‑
0477.646e 01
‑
1.884e
‑
02
‑
1.588e
‑
028.629e
‑
03
‑
4.285e
‑
03
‑
1.373e
‑
031.451e
‑
03
‑
3.388e
‑
0480.000e 00
‑
4.680e
‑
02
‑
1.304e
‑
024.392e
‑
04
‑
3.036e
‑
048.257e
‑
04
‑
1.387e
‑
04
‑
2.640e
‑
0590.000e 00
‑
6.508e
‑
022.751e
‑
037.889e
‑
042.393e
‑
03
‑
3.530e
‑
046.593e
‑
05
‑
2.662e
‑
05100.000e 00
‑
4.497e
‑
02
‑
1.173e
‑
021.799e
‑
02
‑
7.803e
‑
031.955e
‑
03
‑
2.377e
‑
042.543e
‑
05110.000e 00
‑
5.751e
‑
023.376e
‑
03
‑
4.518e
‑
042.080e
‑
03
‑
3.533e
‑
046.173e
‑
05
‑
8.939e
‑
06120.000e 00
‑
3.709e
‑
02
‑
1.242e
‑
021.867e
‑
02
‑
7.876e
‑
031.813e
‑
03
‑
2.282e
‑
041.700e
‑
05130.000e 009.466e
‑
03
‑
1.708e
‑
026.102e
‑
03
‑
2.137e
‑
034.637e
‑
04
‑
7.742e
‑
053.783e
‑
06140.000e 001.124e
‑
02
‑
1.226e
‑
02
‑
1.439e
‑
051.174e
‑
03
‑
2.670e
‑
042.074e
‑
05
‑
5.189e
‑
07150.000e 001.940e
‑
03
‑
2.362e
‑
028.911e
‑
03
‑
1.994e
‑
032.841e
‑
04
‑
2.219e
‑
054.993e
‑
0716
‑
1.467e 00
‑
9.682e
‑
03
‑
1.114e
‑
024.276e
‑
03
‑
8.287e
‑
049.100e
‑
05
‑
5.240e
‑
061.112e
‑
0717
‑
2.056e 01
‑
5.273e
‑
02
‑
3.648e
‑
033.751e
‑
03
‑
6.166e
‑
044.574e
‑
05
‑
1.623e
‑
062.221e
‑
0818
‑
5.694e 00
‑
3.539e
‑
025.957e
‑
03
‑
6.933e
‑
045.340e
‑
05
‑
2.474e
‑
066.054e
‑
08
‑
6.019e
‑
10
[0251]
以下表示各条件式的值。
[0252]
f123/f=1.29
[0253]
f1/f=9.10
[0254]
f2/f1=0.09
[0255]
f23/f=1.39
[0256]
f2/f3=
‑
0.49
[0257]
f3/f=
‑
1.64
[0258]
f34/f=
‑
1.87
[0259]
d34/f=0.07
[0260]
r8f/r8r=0.96
[0261]
t8/t7=0.87
[0262]
d89/f=0.06
[0263]
f89/f=
‑
2.19
[0264]
r9r/f=0.35
[0265]
f9/f=
‑
1.83
[0266]
tl/f=1.23
[0267]
tl/hmax=1.50
[0268]
f/dep=1.89
[0269]
f7/f=
‑
15.97
[0270]
f8/f9=
‑
9.70
[0271]
这样,本数值实施例1的摄像镜头满足上述各条件式。
[0272]
图2是分为子午方向和弧矢方向表示与各像高相对于最大像高hmax的比h(以下称为“像高比h”)对应的横像差的像差图(在图5、图8、图11、图14、图17、图20、图23、图26、图29、图32、图35以及图38中也相同)。图3是分别表示球面像差(mm)、像散(mm)以及畸变(%)的像差图。在像散图和畸变图中表示基准波长(588nm)下的像差量。另外,在像散图中分别表示弧矢像面(s)和子午像面(t)(在图6、图9、图12、图15、图18、图21、图24、图27、图30、图33、图36以及图39中也相同)。如图2和图3所示,根据本数值实施例1的摄像镜头能够良好地
修正各像差。
[0273]
数值实施例2
[0274]
基本镜头数据
[0275]
【表3】
[0276]
f=5.71mm fno=1.9 ω=39.5
°
[0277][0278]
f123=7.250mm
[0279]
f23=7.963mm
[0280]
f34=
‑
10.485mm
[0281]
f89=
‑
11.502mm
[0282]
t7=0.632mm
[0283]
t8=0.632mm
[0284]
d34=0.400mm
[0285]
d89=0.286mm
[0286]
tl=7.038mm
[0287]
hmax=4.71mm
[0288]
dep=3.023mm
[0289]
【表4】
[0290]
非球面数据
[0291]
ika4a6a8a10a12a14a161
‑
8.430e
‑
01
‑
1.034e
‑
045.541e
‑
03
‑
8.650e
‑
037.220e
‑
03
‑
3.548e
‑
038.124e
‑
04
‑
7.418e
‑
052
‑
2.617e 00
‑
2.885e
‑
02
‑
9.307e
‑
03
‑
6.016e
‑
041.208e
‑
03
‑
2.327e
‑
046.519e
‑
04
‑
2.105e
‑
043
‑
6.011e
‑
02
‑
4.853e
‑
02
‑
1.471e
‑
022.544e
‑
034.626e
‑
041.786e
‑
03
‑
2.947e
‑
04
‑
4.954e
‑
0540.000e 005.592e
‑
03
‑
1.000e
‑
021.115e
‑
033.752e
‑
03
‑
2.051e
‑
032.901e
‑
041.090e
‑
0451.668e 004.787e
‑
036.538e
‑
03
‑
9.209e
‑
034.538e
‑
03
‑
3.411e
‑
031.780e
‑
03
‑
2.922e
‑
046
‑
1.108e 00
‑
2.620e
‑
041.158e
‑
02
‑
6.728e
‑
03
‑
3.093e
‑
041.117e
‑
032.351e
‑
04
‑
1.561e
‑
0477.713e 01
‑
2.019e
‑
02
‑
1.602e
‑
028.842e
‑
03
‑
4.504e
‑
03
‑
1.371e
‑
031.481e
‑
03
‑
3.471e
‑
0480.000e 00
‑
4.701e
‑
02
‑
1.376e
‑
021.006e
‑
03
‑
5.887e
‑
048.451e
‑
04
‑
1.277e
‑
04
‑
2.638e
‑
0590.000e 00
‑
6.447e
‑
022.716e
‑
034.552e
‑
042.425e
‑
03
‑
3.219e
‑
046.030e
‑
05
‑
2.661e
‑
05100.000e 00
‑
4.539e
‑
02
‑
1.186e
‑
021.801e
‑
02
‑
7.845e
‑
031.967e
‑
03
‑
2.312e
‑
042.431e
‑
05110.000e 00
‑
5.937e
‑
023.355e
‑
03
‑
4.896e
‑
042.098e
‑
03
‑
3.260e
‑
047.913e
‑
05
‑
1.493e
‑
05120.000e 00
‑
3.873e
‑
02
‑
1.234e
‑
021.871e
‑
02
‑
7.867e
‑
031.816e
‑
03
‑
2.275e
‑
041.728e
‑
05130.000e 007.272e
‑
03
‑
1.660e
‑
025.872e
‑
03
‑
2.115e
‑
034.568e
‑
04
‑
8.091e
‑
053.891e
‑
06140.000e 001.194e
‑
02
‑
1.222e
‑
02
‑
9.607e
‑
051.177e
‑
03
‑
2.669e
‑
042.059e
‑
05
‑
5.678e
‑
07150.000e 004.125e
‑
03
‑
2.418e
‑
029.098e
‑
03
‑
2.017e
‑
032.862e
‑
04
‑
2.232e
‑
054.232e
‑
0716
‑
3.700e 00
‑
9.869e
‑
03
‑
1.090e
‑
024.263e
‑
03
‑
8.286e
‑
049.093e
‑
05
‑
5.230e
‑
061.107e
‑
0717
‑
1.344e 01
‑
5.303e
‑
02
‑
3.807e
‑
033.766e
‑
03
‑
6.166e
‑
044.567e
‑
05
‑
1.621e
‑
062.239e
‑
0818
‑
5.065e 00
‑
3.686e
‑
026.142e
‑
03
‑
7.022e
‑
045.351e
‑
05
‑
2.471e
‑
066.043e
‑
08
‑
5.969e
‑
10
[0292]
以下表示各条件式的值。
[0293]
f123/f=1.27
[0294]
f1/f=7.93
[0295]
f2/f1=0.10
[0296]
f23/f=1.39
[0297]
f2/f3=
‑
0.50
[0298]
f3/f=
‑
1.60
[0299]
f34/f=
‑
1.84
[0300]
d34/f=0.07
[0301]
r8f/r8r=1.16
[0302]
t8/t7=1.00
[0303]
d89/f=0.05
[0304]
f89/f=
‑
2.01
[0305]
r9r/f=0.35
[0306]
f9/f=
‑
2.29
[0307]
tl/f=1.23
[0308]
tl/hmax=1.50
[0309]
f/dep=1.89
[0310]
f7/f=
‑
17.95
[0311]
f8/f9=6.82
[0312]
这样,本数值实施例2的摄像镜头满足上述各条件式。
[0313]
图5表示与像高比h对应的横像差,图6分别表示球面像差(mm)、像散(mm)以及畸变(%)。如图5和图6所示,通过本数值实施例2的摄像镜头,也能够良好地修正各像差。
[0314]
数值实施例3
[0315]
基本镜头数据
[0316]
【表5】
[0317]
f=5.75mm fno=1.9 ω=39.3
°
[0318][0319]
f123=7.664mm
[0320]
f23=7.787mm
[0321]
f34=
‑
13.787mm
[0322]
f89=
‑
5.732mm
[0323]
t7=0.416mm
[0324]
t8=0.422mm
[0325]
d34=0.439mm
[0326]
d89=0.597mm
[0327]
tl=7.087mm
[0328]
hmax=4.71mm
[0329]
dep=3.044mm
[0330]
【表6】
[0331]
非球面数据
[0332]
ika4a6a8a10a12a14a161
‑
8.893e
‑
01
‑
4.170e
‑
045.458e
‑
03
‑
7.235e
‑
036.037e
‑
03
‑
3.144e
‑
037.984e
‑
04
‑
8.494e
‑
052
‑
1.914e 00
‑
2.932e
‑
02
‑
5.540e
‑
031.152e
‑
041.151e
‑
03
‑
5.014e
‑
045.409e
‑
04
‑
1.544e
‑
043
‑
3.056e
‑
02
‑
4.089e
‑
02
‑
8.978e
‑
038.659e
‑
043.681e
‑
041.329e
‑
03
‑
2.497e
‑
04
‑
2.156e
‑
0540.000e 002.975e
‑
03
‑
7.761e
‑
036.664e
‑
043.355e
‑
03
‑
1.701e
‑
032.036e
‑
048.628e
‑
055
‑
1.711e 019.323e
‑
045.385e
‑
03
‑
6.059e
‑
035.648e
‑
03
‑
3.929e
‑
031.536e
‑
03
‑
2.182e
‑
046
‑
2.099e 00
‑
2.454e
‑
031.289e
‑
02
‑
4.330e
‑
03
‑
1.519e
‑
047.398e
‑
042.209e
‑
04
‑
1.184e
‑
0471.509e 02
‑
1.956e
‑
02
‑
8.660e
‑
035.541e
‑
03
‑
2.593e
‑
03
‑
8.210e
‑
041.282e
‑
03
‑
2.453e
‑
0480.000e 00
‑
3.495e
‑
02
‑
6.507e
‑
031.581e
‑
03
‑
1.536e
‑
036.299e
‑
047.757e
‑
05
‑
1.033e
‑
059
‑
3.978e 03
‑
2.692e
‑
02
‑
2.410e
‑
021.288e
‑
02
‑
4.114e
‑
03
‑
1.468e
‑
031.380e
‑
03
‑
2.922e
‑
04100.000e 00
‑
4.120e
‑
02
‑
1.568e
‑
023.294e
‑
03
‑
6.637e
‑
044.503e
‑
04
‑
1.181e
‑
042.106e
‑
06110.000e 00
‑
6.452e
‑
023.607e
‑
03
‑
8.201e
‑
041.658e
‑
03
‑
4.007e
‑
047.560e
‑
05
‑
9.482e
‑
06120.000e 00
‑
5.037e
‑
02
‑
1.235e
‑
021.767e
‑
02
‑
7.605e
‑
031.812e
‑
03
‑
2.381e
‑
041.404e
‑
05136.269e 043.272e
‑
02
‑
2.332e
‑
027.382e
‑
03
‑
2.240e
‑
034.939e
‑
04
‑
6.921e
‑
053.986e
‑
0614
‑
7.610e 004.321e
‑
02
‑
1.341e
‑
02
‑
5.995e
‑
049.412e
‑
04
‑
1.892e
‑
041.590e
‑
05
‑
5.264e
‑
07150.000e 003.763e
‑
03
‑
2.292e
‑
028.212e
‑
03
‑
1.743e
‑
032.498e
‑
04
‑
2.148e
‑
057.561e
‑
07162.127e 00
‑
3.452e
‑
03
‑
1.596e
‑
025.480e
‑
03
‑
1.010e
‑
031.125e
‑
04
‑
7.176e
‑
061.953e
‑
0717
‑
1.162e 05
‑
4.344e
‑
02
‑
4.137e
‑
033.653e
‑
03
‑
6.052e
‑
044.615e
‑
05
‑
1.678e
‑
062.269e
‑
0818
‑
4.838e 00
‑
3.221e
‑
025.076e
‑
03
‑
5.502e
‑
044.246e
‑
05
‑
2.360e
‑
068.408e
‑
08
‑
1.349e
‑
09
[0333]
以下表示各条件式的值。
[0334]
f123/f=1.33
[0335]
f1/f=17.50
[0336]
f2/f1=0.05
[0337]
f23/f=1.35
[0338]
f2/f3=
‑
0.48
[0339]
f3/f=
‑
1.73
[0340]
f34/f=
‑
2.40
[0341]
d34/f=0.08
[0342]
r8f/r8r=0.95
[0343]
t8/t7=1.01
[0344]
d89/f=0.10
[0345]
f89/f=
‑
1.00
[0346]
r9r/f=0.51
[0347]
f9/f=
‑
0.90
[0348]
tl/f=1.23
[0349]
tl/hmax=1.51
[0350]
f/dep=1.89
[0351]
f7/f=1.25
[0352]
f8/f9=
‑
19.45
[0353]
这样,本数值实施例3的摄像镜头满足上述各条件式。
[0354]
图8表示与像高比h对应的横像差,图9分别表示球面像差(mm)、像散(mm)以及畸变(%)。如图8和图9所示,通过本数值实施例3的摄像镜头,也能够良好地修正各像差。
[0355]
数值实施例4
[0356]
基本镜头数据
[0357]
【表7】
[0358]
f=5.60mm fno=1.9 ω=40.0
°
[0359][0360]
f123=7.328mm
[0361]
f23=7.572mm
[0362]
f34=
‑
9.703mm
[0363]
f89=
‑
4.374mm
[0364]
t7=0.563mm
[0365]
t8=0.600mm
[0366]
d34=0.435mm
[0367]
d89=0.453mm
[0368]
tl=6.942mm
[0369]
hmax=4.71mm
[0370]
dep=2.904mm
[0371]
【表8】
[0372]
非球面数据
[0373]
ika4a6a8a10a12a14a16
1
‑
8.222e
‑
011.816e
‑
045.710e
‑
03
‑
8.478e
‑
037.283e
‑
03
‑
3.548e
‑
038.016e
‑
04
‑
8.042e
‑
052
‑
2.728e 00
‑
2.889e
‑
02
‑
9.003e
‑
03
‑
5.537e
‑
041.198e
‑
03
‑
2.352e
‑
046.356e
‑
04
‑
2.256e
‑
043
‑
1.599e
‑
01
‑
5.025e
‑
02
‑
1.557e
‑
022.833e
‑
036.296e
‑
041.837e
‑
03
‑
3.006e
‑
04
‑
6.996e
‑
0540.000e 001.141e
‑
02
‑
8.833e
‑
038.850e
‑
043.653e
‑
03
‑
2.001e
‑
033.280e
‑
048.753e
‑
0551.655e 017.207e
‑
037.583e
‑
03
‑
9.383e
‑
034.288e
‑
03
‑
3.571e
‑
031.715e
‑
03
‑
2.760e
‑
046
‑
1.359e 00
‑
1.146e
‑
031.133e
‑
02
‑
6.377e
‑
03
‑
5.182e
‑
048.489e
‑
042.089e
‑
04
‑
9.049e
‑
0576.853e 01
‑
2.814e
‑
02
‑
1.760e
‑
028.894e
‑
03
‑
4.963e
‑
03
‑
1.370e
‑
031.547e
‑
03
‑
2.156e
‑
0480.000e 00
‑
5.725e
‑
02
‑
1.655e
‑
021.538e
‑
03
‑
6.833e
‑
048.085e
‑
04
‑
9.861e
‑
051.311e
‑
0590.000e 00
‑
6.277e
‑
022.701e
‑
03
‑
9.653e
‑
052.193e
‑
03
‑
4.275e
‑
041.620e
‑
05
‑
2.389e
‑
05100.000e 00
‑
5.445e
‑
02
‑
1.246e
‑
021.808e
‑
02
‑
7.937e
‑
031.938e
‑
03
‑
2.191e
‑
041.905e
‑
05110.000e 00
‑
6.123e
‑
021.462e
‑
03
‑
9.120e
‑
042.095e
‑
03
‑
3.071e
‑
047.561e
‑
05
‑
1.762e
‑
05120.000e 00
‑
4.799e
‑
02
‑
1.106e
‑
021.849e
‑
02
‑
7.968e
‑
031.795e
‑
03
‑
2.312e
‑
041.576e
‑
0513
‑
5.850e 01
‑
4.843e
‑
03
‑
1.511e
‑
026.533e
‑
03
‑
2.094e
‑
034.376e
‑
04
‑
8.160e
‑
056.131e
‑
0614
‑
9.904e 003.441e
‑
02
‑
1.367e
‑
02
‑
4.788e
‑
041.178e
‑
03
‑
2.639e
‑
042.111e
‑
05
‑
4.429e
‑
07150.000e 002.023e
‑
02
‑
2.481e
‑
029.063e
‑
03
‑
2.040e
‑
032.840e
‑
04
‑
2.207e
‑
055.750e
‑
0716
‑
1.714e 00
‑
8.473e
‑
03
‑
1.062e
‑
024.244e
‑
03
‑
8.309e
‑
049.090e
‑
05
‑
5.212e
‑
061.139e
‑
0717
‑
3.913e 01
‑
5.420e
‑
02
‑
3.484e
‑
033.768e
‑
03
‑
6.183e
‑
044.553e
‑
05
‑
1.623e
‑
062.371e
‑
0818
‑
6.217e 00
‑
3.813e
‑
026.320e
‑
03
‑
7.192e
‑
045.327e
‑
05
‑
2.455e
‑
066.140e
‑
08
‑
6.040e
‑
10
[0374]
以下表示各条件式的值。
[0375]
f123/f=1.31
[0376]
f1/f=12.73
[0377]
f2/f1=0.06
[0378]
f23/f=1.35
[0379]
f2/f3=
‑
0.50
[0380]
f3/f=
‑
1.56
[0381]
f34/f=
‑
1.73
[0382]
d34/f=0.08
[0383]
r8f/r8r=3.96
[0384]
t8/t7=1.07
[0385]
d89/f=0.08
[0386]
f89/f=
‑
0.78
[0387]
r9r/f=0.31
[0388]
f9/f=
‑
1.20
[0389]
tl/f=1.24
[0390]
tl/hmax=1.48
[0391]
f/dep=1.93
[0392]
f7/f=1.05
[0393]
f8/f9=2.21
[0394]
这样,本数值实施例4的摄像镜头满足上述各条件式。
[0395]
图11表示与像高比h对应的横像差,图12分别表示球面像差(mm)、像散(mm)以及畸变(%)。如图11和图12所示,通过本数值实施例4的摄像镜头,也能够良好地修正各像差。
[0396]
数值实施例5
[0397]
基本镜头数据
[0398]
【表9】
[0399]
f=5.74mm fno=1.9 ω=39.3
°
[0400][0401]
f123=7.213mm
[0402]
f23=8.038mm
[0403]
f34=
‑
9.965mm
[0404]
f89=
‑
15.808mm
[0405]
t7=0.609mm
[0406]
t8=0.624mm
[0407]
d34=0.398mm
[0408]
d89=0.324mm
[0409]
tl=7.046mm
[0410]
hmax=4.71mm
[0411]
dep=3.038mm
[0412]
【表10】
[0413]
非球面数据
[0414]
ika4a6a8a10a12a14a161
‑
8.398e
‑
01
‑
7.158e
‑
055.555e
‑
03
‑
8.655e
‑
037.220e
‑
03
‑
3.548e
‑
038.128e
‑
04
‑
7.404e
‑
05
2
‑
2.613e 00
‑
2.891e
‑
02
‑
9.371e
‑
03
‑
6.233e
‑
041.204e
‑
03
‑
2.321e
‑
046.534e
‑
04
‑
2.093e
‑
043
‑
5.964e
‑
02
‑
4.855e
‑
02
‑
1.468e
‑
022.547e
‑
034.614e
‑
041.786e
‑
03
‑
2.940e
‑
04
‑
4.879e
‑
0540.000e 005.628e
‑
03
‑
1.001e
‑
021.151e
‑
033.758e
‑
03
‑
2.056e
‑
032.872e
‑
041.084e
‑
0452.120e 004.860e
‑
036.573e
‑
03
‑
9.245e
‑
034.529e
‑
03
‑
3.410e
‑
031.781e
‑
03
‑
2.912e
‑
046
‑
1.115e 00
‑
2.806e
‑
041.158e
‑
02
‑
6.680e
‑
03
‑
3.003e
‑
041.113e
‑
032.339e
‑
04
‑
1.525e
‑
0477.761e 01
‑
2.010e
‑
02
‑
1.572e
‑
028.868e
‑
03
‑
4.517e
‑
03
‑
1.378e
‑
031.480e
‑
03
‑
3.460e
‑
0480.000e 00
‑
4.780e
‑
02
‑
1.390e
‑
021.063e
‑
03
‑
5.647e
‑
048.489e
‑
04
‑
1.281e
‑
04
‑
2.677e
‑
0590.000e 00
‑
6.420e
‑
022.774e
‑
034.305e
‑
042.414e
‑
03
‑
3.244e
‑
046.011e
‑
05
‑
2.640e
‑
05100.000e 00
‑
4.575e
‑
02
‑
1.189e
‑
021.803e
‑
02
‑
7.840e
‑
031.967e
‑
03
‑
2.317e
‑
042.402e
‑
05110.000e 00
‑
5.865e
‑
023.382e
‑
03
‑
4.948e
‑
042.100e
‑
03
‑
3.253e
‑
047.911e
‑
05
‑
1.509e
‑
05120.000e 00
‑
3.996e
‑
02
‑
1.243e
‑
021.869e
‑
02
‑
7.878e
‑
031.813e
‑
03
‑
2.284e
‑
041.708e
‑
05130.000e 006.280e
‑
03
‑
1.700e
‑
025.887e
‑
03
‑
2.090e
‑
034.621e
‑
04
‑
8.069e
‑
053.642e
‑
06140.000e 001.116e
‑
02
‑
1.232e
‑
02
‑
9.410e
‑
051.179e
‑
03
‑
2.665e
‑
042.065e
‑
05
‑
5.614e
‑
07150.000e 002.731e
‑
03
‑
2.411e
‑
029.102e
‑
03
‑
2.018e
‑
032.862e
‑
04
‑
2.227e
‑
054.384e
‑
0716
‑
1.921e 00
‑
9.360e
‑
03
‑
1.098e
‑
024.264e
‑
03
‑
8.284e
‑
049.091e
‑
05
‑
5.235e
‑
061.103e
‑
0717
‑
1.404e 01
‑
5.313e
‑
02
‑
3.791e
‑
033.766e
‑
03
‑
6.168e
‑
044.566e
‑
05
‑
1.622e
‑
062.241e
‑
0818
‑
5.164e 00
‑
3.692e
‑
026.061e
‑
03
‑
6.995e
‑
045.366e
‑
05
‑
2.469e
‑
066.022e
‑
08
‑
6.225e
‑
10
[0415]
以下表示各条件式的值。
[0416]
f123/f=1.26
[0417]
f1/f=7.26
[0418]
f2/f1=0.11
[0419]
f23/f=1.40
[0420]
f2/f3=
‑
0.51
[0421]
f3/f=
‑
1.56
[0422]
f34/f=
‑
1.74
[0423]
d34/f=0.07
[0424]
r8f/r8r=0.96
[0425]
t8/t7=1.02
[0426]
d89/f=0.06
[0427]
f89/f=
‑
2.75
[0428]
r9r/f=0.35
[0429]
f9/f=
‑
2.23
[0430]
tl/f=1.23
[0431]
tl/hmax=1.50
[0432]
f/dep=1.89
[0433]
f7/f=
‑
17.51
[0434]
f8/f9=
‑
7.92
[0435]
这样,本数值实施例5的摄像镜头满足上述各条件式。
[0436]
图14表示与像高比h对应的横像差,图15分别表示球面像差(mm)、像散(mm)以及畸变(%)。如图14和图15所示,通过本数值实施例5的摄像镜头,也能够良好地修正各像差。
[0437]
数值实施例6
[0438]
基本镜头数据
[0439]
【表11】
[0440]
f=5.75mm fno=1.9 ω=39.3
°
[0441][0442]
f123=7.200mm
[0443]
f23=8.104mm
[0444]
f34=
‑
10.241mm
[0445]
f89=
‑
13.136mm
[0446]
t7=0.565mm
[0447]
t8=0.651mm
[0448]
d34=0.391mm
[0449]
d89=0.278mm
[0450]
tl=7.012mm
[0451]
hmax=4.71mm
[0452]
dep=3.042mm
[0453]
【表12】
[0454]
非球面数据
[0455]
ika4a6a8a10a12a14a161
‑
8.347e
‑
01
‑
3.884e
‑
055.664e
‑
03
‑
8.652e
‑
037.218e
‑
03
‑
3.548e
‑
038.130e
‑
04
‑
7.377e
‑
052
‑
2.615e 00
‑
2.890e
‑
02
‑
9.346e
‑
03
‑
6.084e
‑
041.205e
‑
03
‑
2.335e
‑
046.532e
‑
04
‑
2.086e
‑
04
3
‑
6.428e
‑
02
‑
4.860e
‑
02
‑
1.473e
‑
022.544e
‑
034.754e
‑
041.795e
‑
03
‑
2.918e
‑
04
‑
5.057e
‑
0540.000e 005.911e
‑
03
‑
9.980e
‑
031.194e
‑
033.747e
‑
03
‑
2.067e
‑
032.880e
‑
041.152e
‑
0452.713e 004.915e
‑
036.733e
‑
03
‑
9.274e
‑
034.527e
‑
03
‑
3.403e
‑
031.784e
‑
03
‑
2.910e
‑
046
‑
1.069e 00
‑
1.793e
‑
041.145e
‑
02
‑
6.523e
‑
03
‑
2.411e
‑
041.114e
‑
032.272e
‑
04
‑
1.532e
‑
0477.552e 01
‑
2.109e
‑
02
‑
1.564e
‑
028.717e
‑
03
‑
4.559e
‑
03
‑
1.374e
‑
031.487e
‑
03
‑
3.461e
‑
0480.000e 00
‑
4.870e
‑
02
‑
1.406e
‑
021.168e
‑
03
‑
5.877e
‑
048.182e
‑
04
‑
1.378e
‑
04
‑
2.421e
‑
0590.000e 00
‑
6.455e
‑
022.741e
‑
033.506e
‑
042.403e
‑
03
‑
3.228e
‑
046.025e
‑
05
‑
2.732e
‑
05100.000e 00
‑
4.580e
‑
02
‑
1.207e
‑
021.804e
‑
02
‑
7.844e
‑
031.963e
‑
03
‑
2.325e
‑
042.420e
‑
05110.000e 00
‑
5.923e
‑
023.398e
‑
03
‑
5.016e
‑
042.106e
‑
03
‑
3.218e
‑
048.006e
‑
05
‑
1.498e
‑
05120.000e 00
‑
4.012e
‑
02
‑
1.243e
‑
021.872e
‑
02
‑
7.872e
‑
031.815e
‑
03
‑
2.276e
‑
041.733e
‑
05130.000e 004.854e
‑
03
‑
1.688e
‑
025.840e
‑
03
‑
2.096e
‑
034.615e
‑
04
‑
8.135e
‑
053.089e
‑
06140.000e 001.289e
‑
02
‑
1.220e
‑
02
‑
1.299e
‑
041.173e
‑
03
‑
2.669e
‑
042.060e
‑
05
‑
5.785e
‑
07150.000e 004.745e
‑
03
‑
2.418e
‑
029.120e
‑
03
‑
2.017e
‑
032.858e
‑
04
‑
2.238e
‑
054.170e
‑
0716
‑
3.817e 00
‑
9.592e
‑
03
‑
1.082e
‑
024.264e
‑
03
‑
8.287e
‑
049.090e
‑
05
‑
5.233e
‑
061.107e
‑
0717
‑
1.079e 01
‑
5.336e
‑
02
‑
3.808e
‑
033.767e
‑
03
‑
6.168e
‑
044.565e
‑
05
‑
1.622e
‑
062.252e
‑
0818
‑
4.861e 00
‑
3.762e
‑
026.129e
‑
03
‑
7.024e
‑
045.364e
‑
05
‑
2.465e
‑
066.035e
‑
08
‑
6.326e
‑
10
[0456]
以下表示各条件式的值。
[0457]
f123/f=1.25
[0458]
f1/f=6.88
[0459]
f2/f1=0.12
[0460]
f23/f=1.41
[0461]
f2/f3=
‑
0.51
[0462]
f3/f=
‑
1.56
[0463]
f34/f=
‑
1.78
[0464]
d34/f=0.07
[0465]
r8f/r8r=1.14
[0466]
t8/t7=1.15
[0467]
d89/f=0.05
[0468]
f89/f=
‑
2.28
[0469]
r9r/f=0.35
[0470]
f9/f=
‑
2.59
[0471]
tl/f=1.22
[0472]
tl/hmax=1.49
[0473]
f/dep=1.89
[0474]
f7/f=
‑
19.94
[0475]
f8/f9=6.76
[0476]
这样,本数值实施例6的摄像镜头满足上述各条件式。
[0477]
图17表示与像高比h对应的横像差,图18分别表示球面像差(mm)、像散(mm)以及畸变(%)。如图17和图18所示,通过本数值实施例6的摄像镜头,也能够良好地修正各像差。
[0478]
数值实施例7
[0479]
基本镜头数据
[0480]
【表13】
[0481]
f=5.75mm fno=1.9 ω=39.3
°
[0482][0483]
f123=7.753mm
[0484]
f23=7.889mm
[0485]
f34=
‑
14.233mm
[0486]
f89=
‑
5.653mm
[0487]
t7=0.387mm
[0488]
t8=0.450mm
[0489]
d34=0.438mm
[0490]
d89=0.639mm
[0491]
tl=7.043mm
[0492]
hmax=4.71mm
[0493]
dep=3.040mm
[0494]
【表14】
[0495]
非球面数据
[0496]
ika4a6a8a10a12a14a161
‑
9.002e
‑
01
‑
7.186e
‑
045.579e
‑
03
‑
7.302e
‑
036.063e
‑
03
‑
3.156e
‑
037.983e
‑
04
‑
8.423e
‑
052
‑
2.011e 00
‑
2.984e
‑
02
‑
5.625e
‑
035.549e
‑
051.178e
‑
03
‑
4.964e
‑
045.493e
‑
04
‑
1.576e
‑
043
‑
4.061e
‑
02
‑
4.196e
‑
02
‑
9.208e
‑
039.455e
‑
043.935e
‑
041.358e
‑
03
‑
2.571e
‑
04
‑
2.195e
‑
0540.000e 003.431e
‑
03
‑
8.054e
‑
037.456e
‑
043.387e
‑
03
‑
1.726e
‑
032.080e
‑
048.709e
‑
05
5
‑
1.719e 011.448e
‑
035.594e
‑
03
‑
6.388e
‑
035.631e
‑
03
‑
3.885e
‑
031.551e
‑
03
‑
2.278e
‑
046
‑
2.141e 00
‑
2.521e
‑
031.295e
‑
02
‑
4.539e
‑
03
‑
1.851e
‑
047.817e
‑
042.125e
‑
04
‑
1.201e
‑
0471.523e 02
‑
2.011e
‑
02
‑
8.906e
‑
035.635e
‑
03
‑
2.662e
‑
03
‑
8.403e
‑
041.278e
‑
03
‑
2.454e
‑
0480.000e 00
‑
3.349e
‑
02
‑
7.410e
‑
031.663e
‑
03
‑
1.447e
‑
036.238e
‑
044.046e
‑
05
‑
5.658e
‑
0690.000e 00
‑
3.137e
‑
02
‑
2.331e
‑
021.290e
‑
02
‑
4.126e
‑
03
‑
1.483e
‑
031.392e
‑
03
‑
2.991e
‑
04100.000e 00
‑
4.353e
‑
02
‑
1.566e
‑
023.283e
‑
03
‑
6.584e
‑
044.252e
‑
04
‑
1.180e
‑
043.441e
‑
06110.000e 00
‑
6.653e
‑
023.164e
‑
03
‑
8.727e
‑
041.661e
‑
03
‑
3.951e
‑
047.643e
‑
05
‑
1.002e
‑
05120.000e 00
‑
5.095e
‑
02
‑
1.235e
‑
021.770e
‑
02
‑
7.617e
‑
031.812e
‑
03
‑
2.375e
‑
041.427e
‑
05130.000e 003.261e
‑
02
‑
2.289e
‑
027.091e
‑
03
‑
2.207e
‑
034.948e
‑
04
‑
7.086e
‑
054.057e
‑
0614
‑
9.875e 003.920e
‑
02
‑
1.346e
‑
02
‑
5.183e
‑
049.468e
‑
04
‑
1.912e
‑
041.592e
‑
05
‑
5.163e
‑
07150.000e 003.482e
‑
03
‑
2.310e
‑
028.253e
‑
03
‑
1.756e
‑
032.509e
‑
04
‑
2.158e
‑
057.588e
‑
07161.475e 00
‑
4.038e
‑
03
‑
1.562e
‑
025.427e
‑
03
‑
1.009e
‑
031.126e
‑
04
‑
7.156e
‑
061.955e
‑
07170.000e 00
‑
4.313e
‑
02
‑
4.123e
‑
033.655e
‑
03
‑
6.054e
‑
044.615e
‑
05
‑
1.677e
‑
062.263e
‑
0818
‑
5.763e 00
‑
3.246e
‑
025.083e
‑
03
‑
5.534e
‑
044.285e
‑
05
‑
2.364e
‑
068.313e
‑
08
‑
1.317e
‑
09
[0497]
以下表示各条件式的值。
[0498]
f123/f=1.35
[0499]
f1/f=17.44
[0500]
f2/f1=0.05
[0501]
f23/f=1.37
[0502]
f2/f3=
‑
0.48
[0503]
f3/f=
‑
1.73
[0504]
f34/f=
‑
2.48
[0505]
d34/f=0.08
[0506]
r8f/r8r=0.95
[0507]
t8/t7=1.16
[0508]
d89/f=0.11
[0509]
f89/f=
‑
0.98
[0510]
r9r/f=0.53
[0511]
f9/f=
‑
0.89
[0512]
tl/f=1.23
[0513]
tl/hmax=1.50
[0514]
f/dep=1.89
[0515]
f7/f=1.42
[0516]
f8/f9=
‑
19.75
[0517]
这样,本数值实施例7的摄像镜头满足上述各条件式。
[0518]
图20表示与像高比h对应的横像差,图21分别表示球面像差(mm)、像散(mm)以及畸变(%)。如图20和图21所示,通过本数值实施例7的摄像镜头,也能够良好地修正各像差。
[0519]
数值实施例8
[0520]
基本镜头数据
[0521]
【表15】
[0522]
f=5.60mm fno=1.9 ω=40.0
°
[0523][0524]
f123=7.525mm
[0525]
f23=7.583mm
[0526]
f34=
‑
11.243mm
[0527]
f89=
‑
4.298mm
[0528]
t7=0.518mm
[0529]
t8=0.493mm
[0530]
d34=0.469mm
[0531]
d89=0.520mm
[0532]
tl=6.907mm
[0533]
hmax=4.70mm
[0534]
dep=2.964mm
[0535]
【表16】
[0536]
非球面数据
[0537]
ika4a6a8a10a12a14a161
‑
1.019e 00
‑
9.101e
‑
047.233e
‑
03
‑
8.889e
‑
037.077e
‑
03
‑
3.517e
‑
037.965e
‑
04
‑
7.407e
‑
052
‑
2.688e 00
‑
2.873e
‑
02
‑
8.245e
‑
03
‑
1.967e
‑
041.157e
‑
03
‑
3.091e
‑
046.393e
‑
04
‑
2.097e
‑
043
‑
6.136e
‑
02
‑
4.816e
‑
02
‑
1.310e
‑
022.045e
‑
035.717e
‑
041.769e
‑
03
‑
3.218e
‑
04
‑
3.555e
‑
0540.000e 004.726e
‑
03
‑
8.984e
‑
031.071e
‑
033.646e
‑
03
‑
1.969e
‑
032.833e
‑
041.117e
‑
04
5
‑
1.502e 011.245e
‑
037.935e
‑
03
‑
8.697e
‑
034.848e
‑
03
‑
3.348e
‑
031.760e
‑
03
‑
3.316e
‑
046
‑
1.800e 00
‑
1.892e
‑
031.249e
‑
02
‑
6.589e
‑
03
‑
1.460e
‑
041.246e
‑
033.616e
‑
04
‑
2.645e
‑
0471.118e 02
‑
2.526e
‑
02
‑
1.432e
‑
027.659e
‑
03
‑
4.188e
‑
03
‑
1.003e
‑
031.554e
‑
03
‑
2.603e
‑
0480.000e 00
‑
3.629e
‑
02
‑
1.099e
‑
021.526e
‑
03
‑
1.757e
‑
036.810e
‑
046.765e
‑
052.386e
‑
059
‑
1.349e 03
‑
3.659e
‑
02
‑
1.877e
‑
021.234e
‑
02
‑
3.765e
‑
03
‑
1.336e
‑
031.409e
‑
03
‑
2.991e
‑
04100.000e 00
‑
5.184e
‑
02
‑
1.304e
‑
022.992e
‑
03
‑
4.07le
‑
046.014e
‑
04
‑
1.435e
‑
041.585e
‑
06110.000e 00
‑
6.678e
‑
021.027e
‑
03
‑
8.977e
‑
041.992e
‑
03
‑
3.315e
‑
047.618e
‑
05
‑
1.528e
‑
05120.000e 00
‑
5.198e
‑
02
‑
1.062e
‑
021.869e
‑
02
‑
8.024e
‑
031.791e
‑
03
‑
2.298e
‑
041.675e
‑
05136.880e 021.083e
‑
02
‑
1.573e
‑
025.941e
‑
03
‑
1.989e
‑
034.913e
‑
04
‑
7.961e
‑
054.941e
‑
0614
‑
1.307e 013.989e
‑
02
‑
1.461e
‑
02
‑
3.546e
‑
041.204e
‑
03
‑
2.641e
‑
042.126e
‑
05
‑
4.995e
‑
07150.000e 001.844e
‑
02
‑
2.465e
‑
028.957e
‑
03
‑
2.007e
‑
032.826e
‑
04
‑
2.207e
‑
056.573e
‑
0716
‑
5.321e
‑
01
‑
7.769e
‑
03
‑
1.115e
‑
024.287e
‑
03
‑
8.279e
‑
049.104e
‑
05
‑
5.334e
‑
061.247e
‑
0717
‑
7.571e 01
‑
4.921e
‑
02
‑
3.762e
‑
033.704e
‑
03
‑
6.114e
‑
044.592e
‑
05
‑
1.647e
‑
062.225e
‑
0818
‑
6.116e 00
‑
3.718e
‑
026.307e
‑
03
‑
7.139e
‑
045.231e
‑
05
‑
2.410e
‑
066.472e
‑
08
‑
8.165e
‑
10
[0538]
以下表示各条件式的值。
[0539]
f123/f=1.34
[0540]
f1/f=18.63
[0541]
f2/f1=0.04
[0542]
f23/f=1.35
[0543]
f2/f3=
‑
0.46
[0544]
f3/f=
‑
1.77
[0545]
f34/f=
‑
2.01
[0546]
d34/f=0.08
[0547]
r8f/r8r=1.87
[0548]
t8/t7=0.95
[0549]
d89/f=0.09
[0550]
f89/f=
‑
0.77
[0551]
r9r/f=0.35
[0552]
f9/f=
‑
1.01
[0553]
tl/f=1.23
[0554]
tl/hmax=1.47
[0555]
f/dep=1.89
[0556]
f7/f=1.16
[0557]
f8/f9=3.66
[0558]
这样,本数值实施例8的摄像镜头满足上述各条件式。
[0559]
图23表示与像高比h对应的横像差,图24分别表示球面像差(mm)、像散(mm)以及畸变(%)。如图23和图24所示,通过本数值实施例8的摄像镜头,也能够良好地修正各像差。
[0560]
数值实施例9
[0561]
基本镜头数据
[0562]
【表17】
[0563]
f=5.71mm fno=1.9 ω=39.4
°
[0564][0565]
f123=7.289mm
[0566]
f23=8.079mm
[0567]
f34=
‑
20.298mm
[0568]
f89=
‑
12.828mm
[0569]
t7=0.675mm
[0570]
t8=0.612mm
[0571]
d34=0.397mm
[0572]
d89=0.335mm
[0573]
tl=7.066mm
[0574]
hmax=4.70mm
[0575]
dep=3.023mm
[0576]
【表18】
[0577]
非球面数据
[0578]
ika4a6a8a10a12a14a161
‑
8.348e
‑
01
‑
1.176e
‑
045.416e
‑
03
‑
8.594e
‑
037.190e
‑
03
‑
3.546e
‑
038.166e
‑
04
‑
7.565e
‑
052
‑
2.539e 00
‑
2.882e
‑
02
‑
9.283e
‑
03
‑
5.030e
‑
041.208e
‑
03
‑
2.545e
‑
046.448e
‑
04
‑
2.058e
‑
043
‑
1.672e
‑
02
‑
4.751e
‑
02
‑
1.463e
‑
022.387e
‑
034.288e
‑
041.760e
‑
03
‑
2.992e
‑
04
‑
4.690e
‑
0540.000e 003.648e
‑
03
‑
1.015e
‑
029.222e
‑
043.835e
‑
03
‑
2.003e
‑
033.032e
‑
048.117e
‑
05
5
‑
3.551e 003.129e
‑
036.306e
‑
03
‑
8.677e
‑
034.612e
‑
03
‑
3.415e
‑
031.766e
‑
03
‑
2.979e
‑
046
‑
1.443e 00
‑
5.760e
‑
041.290e
‑
02
‑
7.031e
‑
03
‑
3.146e
‑
041.150e
‑
032.507e
‑
04
‑
1.587e
‑
0477.050e 01
‑
1.606e
‑
02
‑
1.563e
‑
029.055e
‑
03
‑
4.275e
‑
03
‑
1.432e
‑
031.443e
‑
03
‑
3.475e
‑
0480.000e 00
‑
3.693e
‑
02
‑
1.370e
‑
023.012e
‑
04
‑
4.091e
‑
049.398e
‑
04
‑
1.378e
‑
04
‑
4.819e
‑
0590.000e 00
‑
6.360e
‑
022.508e
‑
031.023e
‑
032.401e
‑
03
‑
3.695e
‑
044.966e
‑
05
‑
2.235e
‑
05100.000e 00
‑
4.797e
‑
02
‑
1.083e
‑
021.775e
‑
02
‑
7.840e
‑
031.971e
‑
03
‑
2.364e
‑
042.042e
‑
05110.000e 00
‑
5.594e
‑
022.822e
‑
03
‑
5.110e
‑
041.998e
‑
03
‑
3.597e
‑
047.582e
‑
05
‑
1.197e
‑
05120.000e 00
‑
3.572e
‑
02
‑
1.201e
‑
021.874e
‑
02
‑
7.855e
‑
031.809e
‑
03
‑
2.308e
‑
041.601e
‑
05130.000e 001.476e
‑
02
‑
1.754e
‑
026.112e
‑
03
‑
2.064e
‑
034.634e
‑
04
‑
8.015e
‑
054.166e
‑
06140.000e 001.259e
‑
02
‑
1.243e
‑
024.883e
‑
051.181e
‑
03
‑
2.699e
‑
042.041e
‑
05
‑
4.622e
‑
07150.000e 006.096e
‑
04
‑
2.307e
‑
028.809e
‑
03
‑
2.004e
‑
032.885e
‑
04
‑
2.235e
‑
054.708e
‑
0716
‑
2.828e
‑
01
‑
9.720e
‑
03
‑
1.141e
‑
024.299e
‑
03
‑
8.292e
‑
049.106e
‑
05
‑
5.255e
‑
061.132e
‑
0717
‑
1.975e 01
‑
5.192e
‑
02
‑
3.716e
‑
033.742e
‑
03
‑
6.156e
‑
044.576e
‑
05
‑
1.620e
‑
062.187e
‑
0818
‑
5.617e 00
‑
3.535e
‑
025.905e
‑
03
‑
6.820e
‑
045.286e
‑
05
‑
2.481e
‑
066.083e
‑
08
‑
5.764e
‑
10
[0579]
以下表示各条件式的值。
[0580]
f123/f=1.28
[0581]
f1/f=7.58
[0582]
f2/f1=0.11
[0583]
f23/f=1.41
[0584]
f2/f3=
‑
0.49
[0585]
f3/f=
‑
1.66
[0586]
f34/f=
‑
3.55
[0587]
d34/f=0.07
[0588]
r8f/r8r=0.96
[0589]
t8/t7=0.91
[0590]
d89/f=0.06
[0591]
f89/f=
‑
2.25
[0592]
r9r/f=0.35
[0593]
f9/f=
‑
1.87
[0594]
tl/f=1.24
[0595]
tl/hmax=1.50
[0596]
f/dep=1.89
[0597]
f7/f=
‑
17.56
[0598]
f8/f9=
‑
9.64
[0599]
这样,本数值实施例9的摄像镜头满足上述各条件式。
[0600]
图26表示与像高比h对应的横像差,图27分别表示球面像差(mm)、像散(mm)以及畸变(%)。如图26和图27所示,通过本数值实施例9的摄像镜头,也能够良好地修正各像差。
[0601]
数值实施例10
[0602]
基本镜头数据
[0603]
【表19】
[0604]
f=5.70mm fno=1.9 ω=39.5
°
[0605][0606]
f123=7.250mm
[0607]
f23=7.944mm
[0608]
f34=
‑
17.621mm
[0609]
f89=
‑
12.159mm
[0610]
t7=0.633mm
[0611]
t8=0.617mm
[0612]
d34=0.403mm
[0613]
d89=0.270mm
[0614]
tl=7.096mm
[0615]
hmax=4.71mm
[0616]
dep=3.017mm
[0617]
【表20】
[0618]
非球面数据
[0619]
ika4a6a8a10a12a14a161
‑
8.335e
‑
01
‑
9.484e
‑
055.432e
‑
03
‑
8.651e
‑
037.210e
‑
03
‑
3.551e
‑
038.125e
‑
04
‑
7.439e
‑
052
‑
2.595e 00
‑
2.870e
‑
02
‑
9.234e
‑
03
‑
5.918e
‑
041.199e
‑
03
‑
2.390e
‑
046.502e
‑
04
‑
2.093e
‑
043
‑
3.540e
‑
02
‑
4.807e
‑
02
‑
1.464e
‑
022.491e
‑
034.299e
‑
041.772e
‑
03
‑
2.970e
‑
04
‑
4.786e
‑
0540.000e 004.213e
‑
03
‑
1.021e
‑
029.899e
‑
043.816e
‑
03
‑
2.009e
‑
032.868e
‑
049.334e
‑
05
5
‑
1.223e 004.322e
‑
036.242e
‑
03
‑
8.969e
‑
034.606e
‑
03
‑
3.403e
‑
031.778e
‑
03
‑
2.979e
‑
046
‑
1.178e 00
‑
4.071e
‑
041.223e
‑
02
‑
6.969e
‑
03
‑
3.676e
‑
041.142e
‑
032.517e
‑
04
‑
1.531e
‑
0477.159e 01
‑
1.854e
‑
02
‑
1.567e
‑
029.065e
‑
03
‑
4.508e
‑
03
‑
1.398e
‑
031.472e
‑
03
‑
3.449e
‑
0480.000e 00
‑
3.975e
‑
02
‑
1.349e
‑
026.433e
‑
04
‑
5.141e
‑
049.161e
‑
04
‑
1.165e
‑
04
‑
3.892e
‑
0590.000e 00
‑
6.415e
‑
022.736e
‑
037.452e
‑
042.443e
‑
03
‑
3.406e
‑
045.362e
‑
05
‑
2.670e
‑
05100.000e 00
‑
4.763e
‑
02
‑
1.158e
‑
021.781e
‑
02
‑
7.883e
‑
031.959e
‑
03
‑
2.358e
‑
042.180e
‑
05110.000e 00
‑
5.862e
‑
023.010e
‑
03
‑
5.771e
‑
042.052e
‑
03
‑
3.402e
‑
047.710e
‑
05
‑
1.424e
‑
05120.000e 00
‑
3.577e
‑
02
‑
1.199e
‑
021.878e
‑
02
‑
7.853e
‑
031.814e
‑
03
‑
2.303e
‑
041.617e
‑
05130.000e 001.469e
‑
02
‑
1.688e
‑
025.952e
‑
03
‑
2.081e
‑
034.637e
‑
04
‑
7.960e
‑
054.520e
‑
06140.000e 001.145e
‑
02
‑
1.217e
‑
02
‑
2.041e
‑
051.177e
‑
03
‑
2.679e
‑
042.050e
‑
05
‑
5.412e
‑
07150.000e 003.380e
‑
03
‑
2.408e
‑
029.011e
‑
03
‑
2.017e
‑
032.878e
‑
04
‑
2.214e
‑
054.122e
‑
0716
‑
3.045e 00
‑
1.059e
‑
02
‑
1.104e
‑
024.272e
‑
03
‑
8.284e
‑
049.094e
‑
05
‑
5.226e
‑
061.112e
‑
0717
‑
1.322e 01
‑
5.250e
‑
02
‑
3.831e
‑
033.762e
‑
03
‑
6.164e
‑
044.571e
‑
05
‑
1.619e
‑
062.214e
‑
0818
‑
4.923e 00
‑
3.597e
‑
026.069e
‑
03
‑
6.976e
‑
045.341e
‑
05
‑
2.483e
‑
066.027e
‑
08
‑
5.541e
‑
10
[0620]
以下表示各条件式的值。
[0621]
f123/f=1.27
[0622]
f1/f=8.17
[0623]
f2/f1=0.10
[0624]
f23/f=1.39
[0625]
f2/f3=
‑
0.49
[0626]
f3/f=
‑
1.63
[0627]
f34/f=
‑
3.09
[0628]
d34/f=0.07
[0629]
r8f/r8r=1.17
[0630]
t8/t7=0.97
[0631]
d89/f=0.05
[0632]
f89/f=
‑
2.13
[0633]
r9r/f=0.36
[0634]
f9/f=
‑
2.50
[0635]
tl/f=1.24
[0636]
tl/hmax=1.51
[0637]
f/dep=1.89
[0638]
f7/f=
‑
17.59
[0639]
f8/f9=5.56
[0640]
这样,本数值实施例10的摄像镜头满足上述各条件式。
[0641]
图29表示与像高比h对应的横像差,图30分别表示球面像差(mm)、像散(mm)以及畸变(%)。如图29和图30所示,通过本数值实施例10的摄像镜头,也能够良好地修正各像差。
[0642]
数值实施例11
[0643]
基本镜头数据
[0644]
【表21】
[0645]
f=5.71mm fno=1.9 ω=39.5
°
[0646][0647]
f123=7.638mm
[0648]
f23=7.752mm
[0649]
f34=
‑
14.252mm
[0650]
f89=
‑
5.740mm
[0651]
t7=0.421mm
[0652]
t8=0.422mm
[0653]
d34=0.437mm
[0654]
d89=0.636mm
[0655]
tl=7.048mm
[0656]
hmax=4.71mm
[0657]
dep=3.021mm
[0658]
【表22】
[0659]
非球面数据
[0660]
ika4a6a8a10a12a14a161
‑
8.906e
‑
01
‑
6.000e
‑
045.633e
‑
03
‑
7.300e
‑
036.067e
‑
03
‑
3.163e
‑
037.955e
‑
04
‑
8.404e
‑
052
‑
2.025e 00
‑
2.970e
‑
02
‑
5.537e
‑
035.886e
‑
051.156e
‑
03
‑
4.889e
‑
045.507e
‑
04
‑
1.607e
‑
043
‑
4.247e
‑
02
‑
4.219e
‑
02
‑
9.259e
‑
039.983e
‑
044.232e
‑
041.366e
‑
03
‑
2.514e
‑
04
‑
2.460e
‑
0540.000e 003.553e
‑
03
‑
8.131e
‑
037.936e
‑
043.410e
‑
03
‑
1.752e
‑
032.262e
‑
048.853e
‑
05
5
‑
1.743e 011.182e
‑
035.592e
‑
03
‑
6.318e
‑
035.562e
‑
03
‑
3.872e
‑
031.564e
‑
03
‑
2.313e
‑
046
‑
2.064e 00
‑
2.293e
‑
031.297e
‑
02
‑
4.571e
‑
03
‑
1.835e
‑
048.027e
‑
042.588e
‑
04
‑
1.402e
‑
0471.536e 02
‑
2.015e
‑
02
‑
9.629e
‑
035.605e
‑
03
‑
2.719e
‑
03
‑
8.394e
‑
041.303e
‑
03
‑
2.475e
‑
0480.000e 00
‑
3.375e
‑
02
‑
7.682e
‑
031.496e
‑
03
‑
1.519e
‑
036.608e
‑
044.753e
‑
05
‑
1.225e
‑
079
‑
1.938e 04
‑
3.001e
‑
02
‑
2.357e
‑
021.309e
‑
02
‑
4.098e
‑
03
‑
1.475e
‑
031.399e
‑
03
‑
2.954e
‑
04100.000e 00
‑
4.443e
‑
02
‑
1.505e
‑
023.338e
‑
03
‑
6.090e
‑
044.371e
‑
04
‑
1.177e
‑
042.402e
‑
06110.000e 00
‑
6.513e
‑
022.970e
‑
03
‑
8.406e
‑
041.677e
‑
03
‑
3.897e
‑
047.764e
‑
05
‑
1.032e
‑
05120.000e 00
‑
5.125e
‑
02
‑
1.249e
‑
021.774e
‑
02
‑
7.616e
‑
031.810e
‑
03
‑
2.378e
‑
041.429e
‑
05136.551e 043.023e
‑
02
‑
2.221e
‑
027.090e
‑
03
‑
2.200e
‑
034.958e
‑
04
‑
7.127e
‑
054.099e
‑
0614
‑
7.893e 004.207e
‑
02
‑
1.348e
‑
02
‑
5.583e
‑
049.437e
‑
04
‑
1.913e
‑
041.595e
‑
05
‑
5.162e
‑
07150.000e 004.261e
‑
03
‑
2.311e
‑
028.290e
‑
03
‑
1.759e
‑
032.509e
‑
04
‑
2.150e
‑
057.636e
‑
07161.697e 00
‑
3.987e
‑
03
‑
1.558e
‑
025.426e
‑
03
‑
1.008e
‑
031.126e
‑
04
‑
7.169e
‑
061.946e
‑
0717
‑
1.127e 06
‑
4.414e
‑
02
‑
4.099e
‑
033.656e
‑
03
‑
6.054e
‑
044.614e
‑
05
‑
1.678e
‑
062.272e
‑
0818
‑
5.188e 00
‑
3.217e
‑
025.061e
‑
03
‑
5.536e
‑
044.291e
‑
05
‑
2.363e
‑
068.295e
‑
08
‑
1.320e
‑
09
[0661]
以下表示各条件式的值。
[0662]
f123/f=1.34
[0663]
f1/f=17.62
[0664]
f2/f1=0.05
[0665]
f23/f=1.36
[0666]
f2/f3=
‑
0.48
[0667]
f3/f=
‑
1.73
[0668]
f34/f=
‑
2.50
[0669]
d34/f=0.08
[0670]
r8f/r8r=0.95
[0671]
t8/t7=1.00
[0672]
d89/f=0.11
[0673]
f89/f=
‑
1.01
[0674]
r9r/f=0.51
[0675]
f9/f=
‑
0.91
[0676]
tl/f=1.23
[0677]
tl/hmax=1.50
[0678]
f/dep=1.89
[0679]
f7/f=1.23
[0680]
f8/f9=
‑
19.50
[0681]
这样,本数值实施例11的摄像镜头满足上述各条件式。
[0682]
图32表示与像高比h对应的横像差,图33分别表示球面像差(mm)、像散(mm)以及畸变(%)。如图32和图33所示,通过本数值实施例11的摄像镜头,也能够良好地修正各像差。
[0683]
数值实施例12
[0684]
基本镜头数据
[0685]
【表23】
[0686]
f=5.59mm fno=1.9 ω=40.1
°
[0687][0688]
f123=7.569mm
[0689]
f23=7.646mm
[0690]
f34=
‑
13.212mm
[0691]
f89=
‑
4.383mm
[0692]
t7=0.576mm
[0693]
t8=0.513mm
[0694]
d34=0.418mm
[0695]
d89=0.542mm
[0696]
tl=6.980mm
[0697]
hmax=4.71mm
[0698]
dep=2.957mm
[0699]
【表24】
[0700]
非球面数据
[0701]
ika4a6a8a10a12a14a161
‑
1.021e 00
‑
9.377e
‑
047.218e
‑
03
‑
8.896e
‑
037.074e
‑
03
‑
3.518e
‑
037.966e
‑
04
‑
7.397e
‑
052
‑
2.666e 00
‑
2.865e
‑
02
‑
8.234e
‑
03
‑
1.957e
‑
041.154e
‑
03
‑
3.113e
‑
046.385e
‑
04
‑
2.098e
‑
043
‑
6.515e
‑
02
‑
4.825e
‑
02
‑
1.309e
‑
022.041e
‑
035.716e
‑
041.768e
‑
03
‑
3.239e
‑
04
‑
3.760e
‑
0540.000e 004.659e
‑
03
‑
9.071e
‑
031.017e
‑
033.640e
‑
03
‑
1.963e
‑
032.879e
‑
041.142e
‑
04
5
‑
1.575e 011.207e
‑
038.019e
‑
03
‑
8.622e
‑
034.874e
‑
03
‑
3.340e
‑
031.764e
‑
03
‑
3.285e
‑
046
‑
1.742e 00
‑
1.781e
‑
031.255e
‑
02
‑
6.562e
‑
03
‑
1.118e
‑
041.275e
‑
033.792e
‑
04
‑
2.569e
‑
0471.227e 02
‑
2.375e
‑
02
‑
1.420e
‑
027.645e
‑
03
‑
4.194e
‑
03
‑
1.005e
‑
031.554e
‑
03
‑
2.579e
‑
0480.000e 00
‑
3.700e
‑
02
‑
1.083e
‑
021.687e
‑
03
‑
1.702e
‑
036.884e
‑
046.299e
‑
051.866e
‑
059
‑
9.236e 04
‑
3.683e
‑
02
‑
1.867e
‑
021.231e
‑
02
‑
3.780e
‑
03
‑
1.336e
‑
031.413e
‑
03
‑
2.955e
‑
04100.000e 00
‑
4.939e
‑
02
‑
1.286e
‑
022.987e
‑
03
‑
4.072e
‑
046.028e
‑
04
‑
1.432e
‑
041.331e
‑
06110.000e 00
‑
6.643e
‑
021.146e
‑
03
‑
8.499e
‑
042.004e
‑
03
‑
3.293e
‑
047.632e
‑
05
‑
1.545e
‑
05120.000e 00
‑
5.235e
‑
02
‑
1.063e
‑
021.868e
‑
02
‑
8.026e
‑
031.790e
‑
03
‑
2.305e
‑
041.640e
‑
0513
‑
1.661e 021.048e
‑
02
‑
1.574e
‑
025.954e
‑
03
‑
1.994e
‑
034.887e
‑
04
‑
8.024e
‑
054.829e
‑
0614
‑
9.189e 004.011e
‑
02
‑
1.470e
‑
02
‑
3.636e
‑
041.203e
‑
03
‑
2.642e
‑
042.121e
‑
05
‑
5.131e
‑
07150.000e 001.678e
‑
02
‑
2.462e
‑
028.969e
‑
03
‑
2.007e
‑
032.825e
‑
04
‑
2.208e
‑
056.571e
‑
0716
‑
4.702e
‑
01
‑
7.664e
‑
03
‑
1.120e
‑
024.287e
‑
03
‑
8.276e
‑
049.106e
‑
05
‑
5.335e
‑
061.245e
‑
0717
‑
7.164e 01
‑
4.945e
‑
02
‑
3.760e
‑
033.705e
‑
03
‑
6.113e
‑
044.593e
‑
05
‑
1.647e
‑
062.217e
‑
0818
‑
5.154e 00
‑
3.691e
‑
026.303e
‑
03
‑
7.130e
‑
045.233e
‑
05
‑
2.409e
‑
066.476e
‑
08
‑
8.122e
‑
10
[0702]
以下表示各条件式的值。
[0703]
f123/f=1.35
[0704]
f1/f=17.90
[0705]
f2/f1=0.05
[0706]
f23/f=1.37
[0707]
f2/f3=
‑
0.48
[0708]
f3/f=
‑
1.70
[0709]
f34/f=
‑
2.36
[0710]
d34/f=0.07
[0711]
r8f/r8r=1.79
[0712]
t8/t7=0.89
[0713]
d89/f=0.10
[0714]
f89/f=
‑
0.78
[0715]
r9r/f=0.39
[0716]
f9/f=
‑
1.01
[0717]
tl/f=1.25
[0718]
tl/hmax=1.48
[0719]
f/dep=1.89
[0720]
f7/f=1.07
[0721]
f8/f9=3.90
[0722]
这样,本数值实施例12的摄像镜头满足上述各条件式。
[0723]
图35表示与像高比h对应的横像差,图36分别表示球面像差(mm)、像散(mm)以及畸变(%)。如图35和图36所示,通过本数值实施例12的摄像镜头,也能够良好地修正各像差。
[0724]
数值实施例13
[0725]
基本镜头数据
[0726]
【表25】
[0727]
f=5.77mm fno=1.9 ω=39.2
°
[0728][0729]
f123=7.296mm
[0730]
f23=8.025mm
[0731]
f34=
‑
23.903mm
[0732]
f89=
‑
18.820mm
[0733]
t7=0.595mm
[0734]
t8=0.636mm
[0735]
d34=0.394mm
[0736]
d89=0.294mm
[0737]
tl=7.097mm
[0738]
hmax=4.71mm
[0739]
dep=3.054mm
[0740]
【表26】
[0741]
非球面数据
[0742]
ika4a6a8a10a12a14a161
‑
8.426e
‑
01
‑
1.679e
‑
045.341e
‑
03
‑
8.565e
‑
037.177e
‑
03
‑
3.533e
‑
038.205e
‑
04
‑
7.630e
‑
052
‑
2.446e 00
‑
2.874e
‑
02
‑
9.373e
‑
03
‑
4.613e
‑
041.189e
‑
03
‑
2.766e
‑
046.400e
‑
04
‑
1.985e
‑
043
‑
5.311e
‑
03
‑
4.693e
‑
02
‑
1.460e
‑
022.168e
‑
034.107e
‑
041.743e
‑
03
‑
3.030e
‑
04
‑
4.142e
‑
0540.000e 003.101e
‑
03
‑
1.012e
‑
029.308e
‑
043.839e
‑
03
‑
2.026e
‑
033.271e
‑
047.016e
‑
05
5
‑
9.080e 002.340e
‑
036.458e
‑
03
‑
8.300e
‑
034.556e
‑
03
‑
3.434e
‑
031.767e
‑
03
‑
2.983e
‑
046
‑
1.895e 00
‑
1.084e
‑
031.319e
‑
02
‑
6.939e
‑
03
‑
3.067e
‑
041.125e
‑
032.653e
‑
04
‑
1.617e
‑
0476.534e 01
‑
1.483e
‑
02
‑
1.544e
‑
029.053e
‑
03
‑
4.083e
‑
03
‑
1.470e
‑
031.442e
‑
03
‑
3.503e
‑
0480.000e 00
‑
3.476e
‑
02
‑
1.320e
‑
029.682e
‑
05
‑
3.487e
‑
049.620e
‑
04
‑
1.658e
‑
04
‑
4.826e
‑
0590.000e 00
‑
6.196e
‑
022.102e
‑
031.607e
‑
032.185e
‑
03
‑
3.882e
‑
046.484e
‑
05
‑
2.310e
‑
05100.000e 00
‑
4.852e
‑
02
‑
1.030e
‑
021.770e
‑
02
‑
7.819e
‑
031.971e
‑
03
‑
2.355e
‑
042.062e
‑
05110.000e 00
‑
5.354e
‑
023.098e
‑
03
‑
4.815e
‑
041.935e
‑
03
‑
3.967e
‑
047.670e
‑
05
‑
8.050e
‑
06120.000e 00
‑
3.630e
‑
02
‑
1.211e
‑
021.864e
‑
02
‑
7.855e
‑
031.811e
‑
03
‑
2.306e
‑
041.577e
‑
05130.000e 001.542e
‑
02
‑
1.863e
‑
026.301e
‑
03
‑
2.041e
‑
034.547e
‑
04
‑
8.062e
‑
054.155e
‑
06140.000e 001.164e
‑
02
‑
1.226e
‑
026.420e
‑
051.175e
‑
03
‑
2.711e
‑
042.025e
‑
05
‑
4.595e
‑
07150.000e 00
‑
1.173e
‑
03
‑
2.283e
‑
028.715e
‑
03
‑
1.983e
‑
032.883e
‑
04
‑
2.249e
‑
054.324e
‑
0716
‑
9.262e
‑
01
‑
1.003e
‑
02
‑
1.149e
‑
024.312e
‑
03
‑
8.297e
‑
049.130e
‑
05
‑
5.278e
‑
061.133e
‑
0717
‑
1.386e 01
‑
5.119e
‑
02
‑
3.779e
‑
033.730e
‑
03
‑
6.152e
‑
044.582e
‑
05
‑
1.616e
‑
062.153e
‑
0818
‑
5.000e 00
‑
3.629e
‑
025.914e
‑
03
‑
6.742e
‑
045.258e
‑
05
‑
2.512e
‑
066.238e
‑
08
‑
5.719e
‑
10
[0743]
以下表示各条件式的值。
[0744]
f123/f=1.26
[0745]
f1/f=7.83
[0746]
f2/f1=0.10
[0747]
f23/f=1.39
[0748]
f2/f3=
‑
0.49
[0749]
f3/f=
‑
1.64
[0750]
f34/f=
‑
4.14
[0751]
d34/f=0.07
[0752]
r8f/r8r=0.97
[0753]
t8/t7=1.07
[0754]
d89/f=0.05
[0755]
f89/f=
‑
3.26
[0756]
r9r/f=0.38
[0757]
f9/f=
‑
2.54
[0758]
tl/f=1.23
[0759]
tl/hmax=1.51
[0760]
f/dep=1.89
[0761]
f7/f=
‑
17.38
[0762]
f8/f9=
‑
6.74
[0763]
这样,本数值实施例13的摄像镜头满足上述各条件式。
[0764]
图38表示与像高比h对应的横像差,图39分别表示球面像差(mm)、像散(mm)以及畸变(%)。如图38和图39所示,通过本数值实施例13的摄像镜头,也能够良好地修正各像差。
[0765]
以上说明的本实施方式的摄像镜头具有70
°
以上的非常广的视场角(2ω)。顺便地说,上述数值实施例1~13的摄像镜头具有78.4
°
~80.2
°
的视场角。根据本实施方式的摄像镜头,能够拍摄比现有的摄像镜头更广的范围。
[0766]
另外,近年来,由于通过图像处理放大通过摄像镜头得到的图像的任意区域的数字缩放技术的进步,将高像素的摄像元件和高分辨率的摄像镜头组合起来的情况较多。在
高像素的摄像元件中,每1个像素的感光面积减小的情况较多,存在所拍摄的图像变暗的倾向。数值实施例1~13的摄像镜头的fno成为1.9这样小的值。根据本实施方式的摄像镜头,能够得到还与上述那样的高像素的摄像元件对应的足够明亮的图像。
[0767]
因此,在将上述实施方式的摄像镜头应用于内置于便携电话机、智能手机、便携信息终端等便携设备中的摄像机、数码静物相机、安防摄像机、车载摄像机、网络摄像机等的摄像光学系统的情况下,能够实现该摄像机的高性能化和小型化的兼顾。
[0768]
产业利用性
[0769]
本发明能够应用于在内置于便携电话机、智能手机、便携信息终端等便携设备中的摄像机、数码静物相机、安防摄像机、车载摄像机、网络摄像机等比较小型的摄像机中装入的摄像镜头。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。