用于光源的波导集中器
1.相关申请的引用
2.本技术要求2019年3月27日提交的美国申请第62/824,321号以及2019年5月2日提交的美国申请第16/401,533号的优先权,这两个申请的内容通过引用以其整体并入本文以用于全部目的。
技术领域
3.本公开涉及视觉显示器,尤其涉及用于近眼显示器的光学部件和模块。
4.背景
5.头戴式显示器(hmd)、近眼显示器(ned)和其他可穿戴和静止显示系统可以用于向用户呈现虚拟场景,或者用动态信息、数据或虚拟对象来增强真实场景。虚拟现实(vr)或增强现实(ar)场景可以是三维的(3d),以增强体验并使虚拟对象与用户观察到的真实对象相匹配。可以实时跟踪用户的眼睛位置和凝视方向和/或定向,并且可以根据用户的头部定向和凝视方向动态地调整显示的场景,以提供在模拟或增强环境中的更好的沉浸体验。
6.可穿戴显示器的光源需要紧凑且明亮。对于彩色显示器,光源需要提供多色输出,包括将要显示的图像的红色通道的光、绿色通道的光和蓝色通道的光。在扫描式可穿戴彩色显示器中,发射的光束需要具有适于光束扫描的良好定义的空间光束特性。多色光束的不同颜色通道可以由紧凑型准直器一起准直,用于在可穿戴显示器的视场上进行光束扫描。
7.概述
8.根据本公开,提供了一种包括光源子组件的照明器。光源子组件包括第一衬底,该第一衬底支撑用于提供多个光束的多个半导体光源。波导集中器(waveguide concentrator)光学耦合到光源子组件。波导集中器包括第二衬底以及多个波导,该第二衬底包括第一端和第二端,每个波导从第一端延伸到第二端。多个波导中的每个波导被配置用于在第一端接收多个光束中的光束。在第一端处波导之间的间距大于在第二端处波导之间的间距。
9.在一些实施例中,光源子组件被配置用于在第一衬底的端面处发射多个光束。波导集中器还可以包括微透镜阵列,该微透镜阵列设置在第二衬底的第一端处,用于接收多个光束。多个半导体光源可以包括由第一衬底支撑的超辐射发光二极管(sled)的阵列。在第二衬底的第一端包括第一端面的实施例中,多个波导中的每个波导可以与第一端面形成锐角。在一些实施例中,光源子组件还包括第三衬底,该第三衬底支撑用于提供多个光束的多个半导体光源。可以提供多于一个这样的衬底。衬底可以并排安装在散热器上。由第一衬底和第三衬底支撑的多个半导体光源可以各自包括超辐射发光二极管(sled)的阵列。第一衬底和第三衬底可以由第二衬底支撑,并且半导体光源可以包括用于将多个光束耦合到波导集中器的波导中的耦合器。波导集中器的波导可以在第二衬底的第二端处形成输出端口的二维(2d)阵列,用于输出在波导中传播的光。输出端口的2d阵列可以包括一个设置在另一个下面的第一行输出端口和第二行输出端口,由第一衬底支撑的半导体光源可以耦合到
第一行输出端口,并且由第三衬底支撑的半导体光源可以耦合到第二行输出端口。波导集中器的至少一些波导可以在三维(3d)中延伸。波导集中器还可以包括由第二衬底支撑的层的堆叠。波导集中器的至少一些波导可以包括设置在层的堆叠的不同层中并通过层间耦合器光学耦合的多个波导部分。波导集中器的第一端和第二端可以彼此相对设置。多个波导中的每个波导在第二衬底的第一端面处的第一传播模式可以大于在第二衬底的第二端处的第二传播模式。
10.根据本公开,提供了一种包括上述任何波导集中器的投影仪。投影仪可以包括光源子组件,该光源子组件包括衬底,该衬底支撑用于提供多个光束的多个半导体光源。投影仪还可以包括波导集中器,该波导集中器包括第一端面和第二端面以及在第一端面和第二端面之间延伸的多个波导。波导集中器可以在第一端面处光学耦合到光源子组件,用于接收多个光束并且在多个波导中引导多个光束。在第一端面处波导之间的间距可以大于在第二端面处波导之间的间距。投影仪还可以包括在波导集中器的第二端面处光学耦合到波导集中器的准直器,以及光学耦合到准直器用于接收和重定向由准直器准直的多个光束的可倾斜反射器。准直器可以被配置用于准直在波导集中器的第二端面处发射的多个光束,并且用于重定向多个光束以照射到可倾斜反射器上。
11.在一些实施例中,投影仪还包括控制器,该控制器可操作地耦合到光源子组件和可倾斜反射器,并且被配置为与操作可倾斜反射器相协调地激励(energize)多个半导体光源。多个半导体光源中的每个半导体光源可以包括以下至少一个:超辐射发光二极管、激光二极管、垂直腔面发射激光二极管或发光二极管。
12.根据本公开,还提供了包括上述任何投影仪实施例的近眼显示器。近眼显示器可以包括光源子组件,该光源子组件包括衬底,该衬底支撑用于提供多个光束的多个半导体光源。近眼显示器还可以包括波导集中器,该波导集中器包括第一端和第二端以及在第一端和第二端之间延伸的多个波导。波导集中器可以在第一端处光学耦合到光源子组件,用于接收多个光束并且在多个波导中引导多个光束。在第一端处波导之间的间距可以大于在第二端处波导之间的间距。近眼显示器还可以包括:准直器,其在波导集中器的第二端光学耦合到波导集中器,用于准直在第二端发射的多个光束;以及可倾斜反射器,其光学耦合到准直器,用于接收和重定向由准直器准直的多个光束;并且该近眼显示器还可以包括光瞳复制器,该光瞳复制器光学耦合到可倾斜反射器并且被配置用于提供由可倾斜反射器重定向的光束的多个横向偏移副本。多个半导体光源可以包括超辐射发光二极管的阵列。
13.附图简述
14.现在将结合附图描述示例性实施例,附图中:
15.图1a是耦合到透镜的固态光源阵列的示意性三维(3d)视图;
16.图1b是耦合到倾斜透镜的固态光源阵列的示意性3d视图;
17.图2a是耦合到波导集中器的固态光源阵列的示意性3d视图;
18.图2b是耦合到包括波导锥体(taper)和微透镜阵列的波导集中器的固态光源阵列的示意性3d视图;
19.图3a是其中包括锥形波导阵列的3d波导集中器的示意性3d视图;
20.图3b是使用图3a的3d波导集中器的光源的示意性3d视图;
21.图4a是包括叠加的sled阵列芯片的光源的示意性3d视图;
22.图4b是图4a的光源的正视图;
23.图5a至图5c是包括3d波导集中器的照明器的视图,示出了由图4a的光源提供的输入光场(图5a);3d波导集中器的等轴视图(图5b);和输出光场(图5c);
24.图6a是照明器实施例的示意性3d视图,该照明器实施例包括并排设置并耦合到多层波导集中器的多个半导体光源芯片;
25.图6b是图6a的照明器实施例的侧视截面图;
26.图6c是图6b的照明器的层间光耦合器的放大俯视图;
27.图7是包括sled阵列集中器立方体的照明器的示意性侧视图;
28.图8是照明器的等轴视图,该照明器包括并排设置在公共散热器上并耦合到90度转向的波导集中器的多个半导体光源芯片;
29.图9是根据本公开的2d可倾斜微机电(mems)反射器的平面图;
30.图10a是包括图6a
‑
图6c的光源和图9的2d可倾斜mems反射器的投影仪的示意图;
31.图10b是图10a的投影仪的示意性俯视图,示出了由投影仪的光源的各个发射器提供的视场之间的关系;
32.图11是包括本文描述的投影仪的近眼显示器的示意性俯视图;
33.图12a是本公开的头戴式显示器的等轴视图;以及
34.图12b是包括图12a的头戴式装置(headset)的虚拟现实系统的框图。
35.详细描述
36.虽然结合各种实施例和示例描述了本教导,但是并不意图使本教导受限于这些实施例。相反,如本领域技术人员将理解的,本教导包括各种替代物和等同物。本文中叙述本公开的原理、方面和实施例以及其特定示例的所有陈述旨在包括其结构和功能等同物。另外,意图使这种等同物包括当前已知的等同物以及将来开发的等同物(即,所开发的执行相同功能的任何元件),而不管结构如何。
37.除非明确说明,否则如本文所使用的,术语“第一”、“第二”等不旨在暗示顺序排序,而是旨在将一个要素与另一个要素区分开来。类似地,除非明确说明,否则方法步骤的顺序排序并不意味着它们的执行的顺序排序。
38.半导体芯片上的固态光源阵列可以用作可穿戴显示器及其模块的光源。通过例如将芯片设置在公共散热器或硅光学平台上,几个半导体光源阵列芯片可以被组合。鉴于芯片几何形状和发射光束特性,准直由这种组合的多芯片光源发射的光束可能是一项具有挑战性的任务。多个偏移光束可以相对于发射表面成一定角度发射。根据本公开,波导集中器可以用于提供具有多个发射点的光源,这些发射点设置在垂直于光轴的单个平面中。
39.参考图1a,光源子组件包括在输出面104发射多个光束102的固态光源阵列100,所述固态光源例如发光二极管,诸如超辐射发光二极管(sled)、侧面发射激光二极管等。为了减少背向反射,各个光源的波导106可以与输出面104成锐角设置,即不垂直于输出面104。透镜108a平行于输出面104设置。透镜108a接收多个光束102,并在焦平面110处使光束102准直。透镜108a需要具有高数值孔径(na)以使光束102准直,而不会引入显著的光束失真和像差。
40.参考图1b,光源阵列100在输出面104发射多个光束102。为了减少背向反射,各个sled的波导106可以与输出面104成锐角设置,即不垂直于输出面104。透镜108b与输出面
104成一定角度设置,并垂直于光束102。由于输入光线角度的范围较窄,因此透镜108b不需要像图1a的透镜108a那样具有高的na。图1b的透镜108b还可以更小。然而,准直光束102的腰不再设置在垂直于准直光束102的传播方向的单个平面中。图1b中用星号(*)示出了近似的光束腰(beam waist)位置。准直光束102的偏移腰可能在沿光路更远处导致问题,因为它们可能难以聚焦/准直在一起。
41.转向图2a,固态光源阵列100在输出面104处发射多个光束102。为了减少背向反射,各个光源(诸如sled)的波导106与输出面104成锐角设置,即不垂直于输出面104。波导集中器208a被设置成接收光束102。波导集中器208a的各个波导209a被设置成以最小的角度失准损耗(包括光在对应界面处的角度折射)拦截对应的光束102。波导209a之间在波导集中器208a的远端面处的间距大于在近端处的间距。
42.参考图2b,波导集中器208b是图2a的波导集中器208a的实施例。光源阵列100(图2b)在输出面104发射多个光束102。为了减少背向反射,各个光源的波导106与输出面104成一定角度设置,即不垂直于输出面104。波导集中器208b包括微透镜阵列210,用于将各个光束102聚焦到各个波导209b中。波导209b可以包括波导锥体部分212,用于将大传播模式214转换成较小传播模式216。波导209a和209b可以包括单模波导。衬底可以包括玻璃、塑料、半导体等。
43.参考图3a,三维(3d)波导集中器308包括衬底320,衬底320具有相对的第一端面321和第二端面322。多个波导309从第一端面321延伸到第二端面322。为简洁起见,仅示出了三个波导309。通常,可以设置两个、三个或更多个波导309。第一端面321处波导309之间的间距323对应于sled阵列的光束302(在图3a中以星号示出)之间的间距,大于在第二端面322处的间距324。波导309可以在3d中延伸和转向,并且可以在衬底320中通过用聚焦的高强度激光束进行3d写入来制造。锥体312可以设置在波导309a中,用于模式转换。衬底320可以包括玻璃、塑料等。衬底320的输入平面和出射平面(即第一端面321和第二端面322的平面)不需要平行,即它们可以相对于底面和/或彼此倾斜。在一些实施例中,第一端面321和第二端面322不是相对的面,而是形成公共边缘的接合面,例如,它们可以相对于彼此成90
°
。这可能有利于紧凑的包装。
44.现在参考图3b,照明器300包括图3a的3d波导集中器308。照明器300可以用在彩色投影显示器中。照明器300还包括具有红色(r)通道固态光源100r、绿色(g)通道固态光源100g和蓝色(b)通道固态光源100b的光源子组件。通常,可以设置一个、两个、三个或更多个固态光源。光源100r、100g和100b并排设置,并耦合到3d波导集中器308。红色通道光源100r可以包括例如由公共半导体衬底支撑,并且被配置用于在半导体衬底的端面处发射多个光束的sled波导结构的阵列(图3b中未示出)。红色通道光源100r的sled波导结构可以是独立可控的,并且在被激励时可以独立发射红色通道波长的超辐射光。红色通道光源100r的不同sled波导结构的波长可以是红色通道的相同或不同的波长。绿色通道固态光源100g和蓝色通道固态光源100b可以类似地配置,其中所发射的光的波长分别在绿色通道和蓝色通道的波长带内。
45.多个波导309r(每个从衬底320的第一端321延伸到第二端322)传送由红色通道光源100r的sled波导结构之一发射的红色通道光。类似地,多个波导309g(每个从第一端321延伸到第二端322)传送由绿色通道光源100g的sled波导结构之一发射的绿色通道光;以及
多个波导309b(每个从衬底320的第一端321延伸到第二端322)传送由蓝色通道光源100b的sled波导结构之一发射的蓝色通道光。多个波导309r、309g和309b中的每个波导被配置用于在衬底320的第一端321处接收由对应的固态光源100r、100g和100b发射的多个光束中的光束。多个波导309r、309g和309b的波导之间在第一端321处的水平间距可以大于在第二端322处的水平间距。
46.波导集中器308的波导309r、309g和309b在衬底320的第二端322形成输出端口350的二维(2d)阵列,用于输出在波导309r、309g和309b中传播的光。在整个说明书中,术语“输出端口”意为对应波导在衬底320的第二端322处的端部。
47.输出端口350的2d阵列包括一个设置在另一个下方的第一行351输出端口、第二行352输出端口和第三行353输出端口,如用穿过多个波导309r、309g和309b中的中间波导绘制的竖直线354所示。红色通道光源100r的sled波导结构耦合到沿第一行351设置的输出端口;绿色通道光源100g的sled波导结构耦合到沿第二行352设置的输出端口;蓝色通道光源100b的sled波导结构耦合到沿第三行353设置的输出端口。输出端口的确切顺序并不重要,波导309r、309g和309b可以互换。此外,可以设置少于或多于三个光源100r、100g和100b。光源可以属于不同的颜色通道或属于同一颜色通道。为了在衬底320的第二端322处形成输出端口350的2d阵列,波导309r、309g和/或309b中的一些或全部可以被设置,并且可以在三维方向上弯曲和转向。例如,通过使用高强度紧密聚焦的激光来改变激光束的3d焦斑(focal spot)位置附近的衬底320的折射率,可以形成这种弯曲和转向的波导。还应注意,第一端321和第二端322的面可以是平行的,但不必须平行。例如,面可以形成锐角或钝角,并且波导309r、309g和309b在从第一端321行进到第二端322时可以对应地“转向”。
48.还应注意,在光源和波导集中器之间的耦合不必须仅是自由空间的。它也可以基于波导管道(canal),该波导管道是通过形成直径为几微米的管的纳米划线(nanoscribing)工艺形成的,其中光在管内部被引导。凭借纳米划线,将光从光源的输出端口精确地引导到集中器的输入端就变得有可能。任何自由形式的3d形状都有可能通过纳米划线来实现,因此它的形状可以像导线或光导管。这可以促进耦合效率的优化。
49.参考图4a和图4b,sled阵列400r、400g和400b各自被配置用于发射特定颜色通道(即,红(r)色通道(sled阵列400r);绿(g)色通道(sled阵列400g);和蓝(b)色通道(sled阵列400b))的光。如图所示,sled阵列400r、400g和400b可以组合成光源子组件400,以提供紧凑的多色光源。图4b示出了红(r)色通道sled阵列400r翻转并且变得靠近绿(g)色通道sled阵列400g和蓝(b)色通道sled阵列400b。sled阵列400r、400g和400b的芯片的任何定向都是可能的,例如全部在一条线上,或者其中某个其他颜色通道翻转。光源子组件400的一个优点在于,sled阵列400r、400g和400b的波导的输出端彼此靠近设置,因此,如果使用了波导集中器,则波导集中器可以更小、更轻并且制造成本更低。
50.转向图5a、图5b和图5c,3d波导集中器508(图5b)是图3a的3d波导集中器308的实施例。图5的波导集中器508包括具有第一端面521和第二端面522的衬底520。图5b的3d波导集中器508的输入光场包括来自图4a和图4b的sled阵列400r、400g和400b的光,为了方便起见,在图5a中再现了sled阵列400r、400g和400b。为每个sled阵列400r、400g和400b中的每个sled设置波导509。每个波导509从3d波导集中器508的第一端面521延伸到第二端面522。每个波导509可以在3d中延伸和转向,并且可以在衬底520中通过用聚焦的激光束进行3d写
入来制造。波导509形成r光场、g光场和b光场的间距紧密的阵列528,该阵列528可以被配置成如图5c所示的2d阵列。还应注意,波导集中器不一定需要是3d的。在2d配置中,人们保留了许多优势,并且人们可以使用光刻技术制造2d集中器(例如使用不同于玻璃的主体材料)。这可能为大规模生产带来优势。
51.参考图6a和图6b,照明器600类似于图3b的照明器300,但是包括可以使用2d光刻技术制造的多层波导集中器608。图6a和图6b的照明器600是紧凑的多色多通道光源,其输出光场可以被配置成期望的图案,例如,其中对应于相同颜色通道的光场排列成一维阵列,并且对应于不同颜色通道的不同一维阵列并排设置,如上面参考图3b所解释的。
52.图6a和图6b的照明器600包括光源子组件,该光源子组件具有并排设置并耦合到多层波导集中器608的红色通道固态光源100r、绿色通道固态光源100g和蓝色通道固态光源100b。红色通道光源100r可以包括由公共半导体衬底601支撑,并且被配置用于在半导体衬底601的端面处发射多个光束的sled波导结构604的阵列。红色通道光源100r的不同sled波导结构的波长可以是相同或不同的波长。绿色通道固态光源100g和蓝色通道固态光源100b可以类似地配置,其中所发射的光的波长分别在绿色通道和蓝色通道的波长带内。
53.多个波导609r(每个从衬底620的第一端621延伸到相对的第二端622)传送由红色通道光源100r的sled波导结构604发射的红色通道光。类似地,多个波导309g(每个从第一端621延伸到第二端622)传送由绿色通道光源100g的sled波导结构发射的绿色通道光;并且多个波导609b(每个从衬底620的第一端621延伸到第二端622)传送由蓝色通道光源100b的sled波导结构发射的蓝色通道光。多个波导609r、609g和609b中的每个波导被配置用于在衬底620的第一端621处接收由对应的固态光源100r、100g和100b发射的多个光束中的光束。多个波导609r、609g和609b的波导之间在第一端621处的水平间距可以大于在第二端622处的水平间距。多层波导集中器608的波导609r、609g和609b在衬底620的第二端622处形成输出端口650的2d阵列(为了方便起见以平面图示出),用于输出在波导609r、609g和609b中传播的光。
54.参考图6b和图6c,照明器600的多层波导集中器608包括分别是第一包覆层631、第二包覆层632、第三包覆层633和第四包覆层634以及分别是第一波导层641、第二波导层642和第三波导层643的堆叠(图6b)。可以设置比所示出的更多或更少的层。波导层641、642、643之中的至少一些波导层之间的至少一些包覆层631、632、633、634可以足够薄以允许层间光耦合。作为说明,包括波导锥体651和652(图6c)的波导部分被薄的第二包覆层632分开,并且如图所示一个设置在另一个之上。可以选择波导锥体651和652之间的长度、形状和距离,以便将来自底部波导锥体651的所有光耦合到顶部波导锥体652。在运行中,来自sled阵列100r、100g和100b的各个sled波导结构604的光耦合到第一波导层641的波导。来自第一波导层641的光向上传输到第二波导层642中,第二波导层642设置得比第一波导层641更靠近第三波导层643。可能需要多次层间过渡来将输出光场之间的垂直间距减小到期望值。
55.现在参考图7,立方体照明器700包括sled阵列集中器立方体720和安装在集中器立方体720的不同侧的sled芯片702r、702g和702b,这些sled芯片用于分别提供红色、绿色和蓝色通道波长的照明光。sled芯片702r、702g和702b可以包括反射器704(例如集成反射镜、倾斜面和/或布拉格光栅结构),反射器704在集中器立方体720内部重定向发射的光。集中器立方体720包括多个通道或波导709,用于将发射的光重定向到r、g和b光场的输出光场
阵列728,输出光场阵列728可以被配置成例如2d阵列。输出光场阵列728可以设置在集中器立方体720的发射侧722,用于由准直器元件760(诸如透镜、凹面镜、自由形状光学元件等)准直。立方体照明器700的优点包括热量重新分配和封装的紧凑性。可以使用非立方体形状(例如平行四边形、菱形等)的衬底。此外,要注意的是,不仅是sled,还有其他固态光源(例如发光二极管、侧面发射激光二极管、垂直腔面发射激光二极管等)可以被使用。
56.上面公开的波导集中器可以提供许多优点。例如,波导集中器能够使光源从剩余的光学器件去耦,从而实现紧凑的封装。在不同的ar/vr显示器和显示器模型之间,光源可以容易地互换。光源的热去耦也是可能的,使得光源的加热不会使光学器件、1d/2d扫描仪等错位(misalign)。此外,波导集中器可以大大简化与光纤的接口连接,这扩展了将光传送到ar/vr系统的不同部件和模块的可能性。
57.转向图8,紧凑型照明器800包括光源子组件810,光源子组件810包括在公共散热器814上的第一衬底811、第二衬底812和第三衬底813,每个衬底811、812、813例如支撑多个半导体光源,诸如sled。每个衬底811、812、813可以提供红色通道、绿色通道和蓝色通道之一的光。
58.90度转向的波导集中器808光学耦合到光源子组件810。可以在第一衬底811、第二衬底812和第三衬底813与90度转向的波导集中器808之间设置小的气隙,90度转向的波导集中器808包括具有第一接合面821和第二接合面821的衬底820以及用于将光从第一接合面821传送到第二接合面822的多个波导(未示出)。波导可以在3d中转向和弯曲,和/或可以设置集成反射镜以用于垂直光束偏转。在一些实施例中,90度转向的波导集中器808可以包括具有集成的90度转向反射镜的光子集成电路(pic)。透镜860可以安装在90度转向的波导集中器808上,用于准直在90度转向的波导集中器808的第二面821发射的光束。
59.参考图9,二维(2d)微机电系统(mems)扫描仪900包括由一对第一扭转铰链901支撑的可倾斜反射器910,该第一扭转铰链901允许可倾斜反射器910围绕x轴倾斜。第一扭转铰链901从可倾斜反射器910延伸到平衡环(gimbal ring)920,平衡环920由一对第二扭转铰链902支撑,该第二扭转铰链902从平衡环920延伸到固定基座922,用于平衡环920和可倾斜反射器910围绕y轴的倾斜。致动器(例如静电、电磁和/或压电致动器)可以设置在可倾斜反射器910和/或平衡环920的下方,用于提供用于致动可倾斜反射器910围绕x轴和y轴倾斜的力。例如,在图9所示的实施例中,第一致动器951可以设置在可倾斜反射器910的边缘下方,以使可倾斜反射器910围绕x轴倾斜。第二致动器952可以设置在平衡环920下方,用于使平衡环920和可倾斜反射器910围绕y轴倾斜。
60.可以设置反馈电路954来确定可倾斜反射器910的倾斜的x角度和y角度。反馈电路954可以测量第一静电致动器951和可倾斜反射器910之间的电容以确定x倾斜,以及测量第二静电致动器952和平衡环920之间的电容以确定y倾斜。也可以专门为反馈电路954设置单独的电极。在一些实施例中,当可倾斜反射器910以特定的x角度和/或y角度倾斜时,反馈电路954可以提供同步或触发脉冲。
61.参考图10a,用于近眼显示器的投影仪1000包括照明器1001,照明器1001包括固态光源1004、波导集中器1008和准直器1060。图3b的照明器300、图6a和图6b的照明器600、图7的立方体照明器700和/或图8的紧凑型照明器800可以用来代替照明器1001。投影仪1000还包括光学耦合到照明器1001的图9的2d mems扫描仪900,以及可操作地耦合到固态光源
1004和2d mems扫描仪900的控制器1080。固态光源1004可以包括支撑多个半导体光源(例如sled的阵列)的衬底(例如半导体芯片衬底),用于在衬底的端面处提供多个光束1002。
62.波导集中器1008可以包括本文公开的任何波导集中器,例如图2a的波导集中器208a、图2b的波导集中器208b、图3a和图3b的波导集中器308、图5b的波导集中器508、图6a和图6b的波导集中器608、图7的集中器立方体720和/或图8的90度转向的波导集中器808。波导集中器1008以及就此而言(for that matter)本文公开的其他波导集中器带来的一些优点可以包括以下内容:
63.(1)准直器1060所需的视场(fov)可以更小,这使得更容易将光瞳投射到可倾斜反射器910上;
64.(2)更小的fov允许人们使用更小直径的准直光学器件;
65.(3)可以消除可变的光束腰位置。如果需要,所有光源可以在同一平面发射;
66.(4)人们可以为每种颜色(r、g、b)提供光束腰位置的偏移,以解释准直器光学器件中的色差;
67.(5)可以在波导集中器1008中而不是在准直器1060中进行光束整形,例如将椭圆形截面光束改变为圆形或其他椭圆形截面光束;
68.(6)通过以上(3)和(5)的组合,可提供自由形状或不对称光学器件;以及
69.(7)波导耦合器允许自波导集中器1008的出射面的张开角(opening angle)或发散角被调谐,以更好地匹配集中器1060的期望焦距。
70.准直器1060(例如体透镜(bulk lens)、菲涅耳透镜(fresnel lens)、衍射透镜、凹面镜、自由形状光学元件等)光学耦合到波导集中器1008,以准直由固态光源1004发射并由波导集中器1008引导的多个光束1002,从而形成准直光束1002c。2d mems扫描仪900的可倾斜反射器910光学耦合到准直器1060,用于接收准直光束1002c并且围绕x轴和y轴扫描准直光束1002c。在一些实施例中,准直器1060或就此而言本文公开的任何其他准直器可以被配置成至少执行以下内容:
71.(a)对固态光源1004的所有发射器进行准直,以填充可倾斜反射器910的期望部分;
72.(b)使光束1002c适当地成形。固态光源1004的发射器可以发射椭圆形截面的高斯光束,并且可能需要被准直成圆形轮廓的或其他椭圆形的图案;
73.(c)将波导集中器1008的输出光瞳成像到可倾斜反射器910上,使得所有发射器的光束光斑都集中在可倾斜反射器910上;和/或
74.(d)校正各个发射器的可变的光束腰位置,即由以锐角离开半导体芯片的光产生的位置。
75.在一些实施方式中,2d mems扫描仪900可以用1d扫描镜或衍射反射器代替。光源的线性阵列可以用于在垂直于扫描方向的方向上提供多个图像像素。在一些实施例中,2d mems扫描仪900可以用两个1d扫描镜代替,一个用于绕x轴扫描,另一个用于绕y轴扫描。
76.控制器1080可以被配置为与倾斜可倾斜反射器910相协调地激励固态光源1004的各个sled,以在角域中提供图像。当人眼观看时,角域中的图像由眼睛的角膜和晶状体投影,以在眼睛的视网膜上变成空间域的图像。
77.在图10b中进一步示出了投影仪1000的运行。在该示例中,固态光源1004包括三个
发射器。波导集中器1008对应地输出三个平行的发散光束(仅示出了主光线)1021(虚线)、1022(实线)和1023(短划线)。准直器1060使光束1021、1022和1023准直。通过选择合适的几何形状,准直器1060还可以用于使准直的光束1021、1022和1023照射到可倾斜反射器910(例如反射镜或衍射反射器)的中心,用于扫描所有三个光束1021、1022和1023。由于光束1021、1022和1023在可倾斜反射器910上的入射角不同,因此光束1021、1022和1023的相应扫描区域1031(虚线)、1032(实线)和1033(短划线)如图所示相互偏移。控制器1080可以通过向固态光源1004的三个发射器的驱动信号提供对应的延迟来考虑这些偏移。可以提供偏移量以便与单个发射器的情况相比,在公共扫描区域1020中有效地使投影仪1000的空间分辨率成三倍。
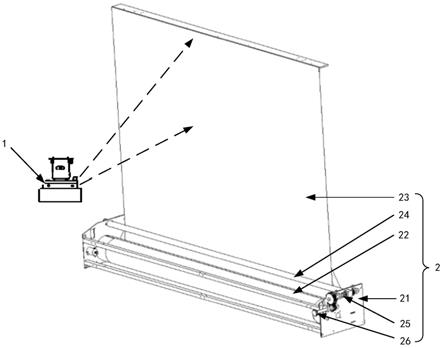
78.转向图11,本公开的近眼显示器1100包括具有太阳镜形状因子的框架1101。对于每只眼睛,框架1101支撑:光源子组件1102、光学耦合到光源子组件1102的波导集中器1104、光学耦合到波导集中器1104的准直器1106、光学耦合到准直器1106的扫描仪1108以及光学耦合到扫描仪1108的光瞳复制器1110。光源子组件1102可以包括支撑多个半导体光源(例如,sled)的衬底,用于提供多个光束。如上所述,波导集中器1104可以包括在两个端面之间延伸的多个波导,用于接收多个光束并在多个波导中引导多个光束。作为非限制性示例,光源子组件1102和波导集中器1104可以包括耦合到图2a的波导集中器208a或图2b的波导集中器208b的固态光源阵列100、图3b的照明器300、图6a的照明器600、图7的照明器700等。准直器1106可以基于凹面镜、体透镜、菲涅耳透镜、全息透镜等,并且可以与光源子组件1102和波导集中器1104集成在一起,例如,如示出照明器800的图8所示。作为非限制性示例,扫描仪1108可以包括图9和图10a的2d mems扫描仪900(该扫描仪具有单个可倾斜反射器910),或者包括通过光瞳中继器光学耦合的一对1d可倾斜反射器的扫描仪。光瞳复制器1110的功能是在视窗1112处提供由扫描仪1108重定向或扫描的光束的多个横向偏移的副本。
79.本公开的实施例可以包括人工现实系统或结合人工现实系统来实现。人工现实系统在感官信息呈现给用户之前以某种方式调整通过感官获得的关于外界的感官信息(如视觉信息、音频、触觉(躯体感觉)信息、加速度、平衡等)。作为非限制性示例,人工现实可以包括虚拟现实(vr)、增强现实(ar)、混合现实(mr)、混杂现实(hybrid reality)或其某种组合和/或衍生物。人工现实内容可以包括完全生成的内容或者与捕获的(例如,真实世界的)内容相结合的生成的内容。人工现实内容可以包括视频、音频、身体或触觉反馈或者它们的某种组合。这些内容中的任何一个都可以在单个通道或多个通道中呈现,例如在向观众产生三维效果的立体视频中呈现。此外,在一些实施例中,人工现实还可以与应用、产品、附件、服务或其某种组合相关联,这些应用、产品、附件、服务或其某种组合用于例如在人工现实中创建内容和/或以其他方式在人工现实中使用(例如,在人工现实中执行活动)。提供人工现实内容的人工现实系统可以在各种平台上实现,包括可穿戴显示器,例如连接到主计算机系统的hmd、独立的hmd、具有眼镜形状因子的近眼显示器、移动设备或计算系统,或者能够向一个或更多个观众提供人工现实内容的任何其他硬件平台。
80.参考图12a,hmd 1200是为了更大程度地沉浸到ar/vr环境内而包围用户的面部的ar/vr可穿戴显示系统的例子。hmd 1200可以包括本文公开的光源、照明器和/或投影仪。hmd 1200的功能是用计算机生成的图像来增强物理、真实世界环境的视图,和/或生成完全
虚拟的3d图像。hmd 1200可以包括前主体1202和带1204。前主体1202被配置为以可靠和舒适的方式放置在用户的眼睛前面,以及带1204可以被拉伸以将前主体1202固定在用户的头上。显示系统1280可以布置在前主体1202中,用于向用户呈现ar/vr图像。前主体1202的侧面1206可以是不透明的或透明的。
81.在一些实施例中,前主体1202包括定位器1208、用于跟踪hmd 1200的加速度的惯性测量单元(imu)1210以及用于跟踪hmd 1200的位置的位置传感器1212。imu 1210是基于从一个或更多个位置传感器1212接收的测量信号来生成指示hmd 1200的位置的数据的电子设备,位置传感器1212响应于hmd 1200的运动生成一个或更多个测量信号。位置传感器1212的示例包括:一个或更多个加速度计、一个或更多个陀螺仪、一个或更多个磁力计、检测运动的另一种合适类型的传感器、用于imu 1210的误差校正的一类传感器或者其某种组合。位置传感器1212可以位于imu 1210的外部、imu 1210的内部或者这两种位置的某种组合。
82.定位器1208由虚拟现实系统的外部成像设备跟踪,使得虚拟现实系统可以跟踪整个hmd 1200的定位和定向。可以将由imu 1210和位置传感器1212产生的信息与通过跟踪定位器1208获得的位置和定向进行比较,以提高hmd 1200的位置和定向的跟踪准确性。当用户在3d空间中移动和转向时,准确的位置和定向对于向用户呈现适当的虚拟场景是重要的。
83.hmd 1200还可以包括深度相机组件(dca)1211,其捕获描述围绕hmd 1200的部分或全部的局部区域的深度信息的数据。为此,dca 1211可以包括激光雷达(lidar)或类似设备。可以将深度信息与来自imu 1210的信息进行比较,以便更准确地确定hmd 1200在3d空间中的位置和定向。
84.hmd 1200还可以包括眼睛跟踪系统1214,用于实时地确定用户眼睛的定向和位置。所获得的眼睛的位置和定向还允许hmd 1200确定用户的凝视方向,并相应地调整由显示系统1280生成的图像。在一个实施例中,确定视觉辐辏度(vergence),即用户的眼睛凝视的会聚角度。根据视角和眼睛位置,所确定的凝视方向和视觉辐辏角(vergence angle)也可以用于视觉伪像的实时补偿。此外,所确定的视觉辐辏角和凝视角可用于与用户的交互、突出显示对象、将对象带到前景、创建附加对象或指针等。还可以提供音频系统,包括例如内置在前主体1202中的一组小扬声器。
85.参考图12b,ar/vr系统1250可以包括本文公开的光源和投影仪显示器。ar/vr系统1250包括图12a的hmd 1200、外部控制台1290和输入/输出(i/o)接口1215,外部控制台1290存储各种ar/vr应用、设置和校准程序、3d视频等,输入/输出(i/o)接口1215用于操作控制台1290和/或与ar/vr环境交互。hmd 1200可以用物理电缆“拴(tether)”到控制台1290上,或者经由诸如wi
‑
fi等的无线通信链路连接到控制台1290。可以有多个hmd 1200,每个hmd 1200具有相关联的i/o接口1215,其中每个hmd 1200和i/o接口1215与控制台1290通信。在替代配置中,ar/vr系统1250中可以包括不同的和/或附加的部件。另外,结合图12a和图12b中所示的一个或更多个部件描述的功能可以以不同于在一些实施例中结合图12a和图12b描述的方式分布在部件之间。例如,控制台1215的一些或全部功能可以由hmd 1200提供,反之亦然。hmd 1200可以设置有能够实现这种功能的处理模块。
86.如上面参考图12a所述,hmd 1200可以包括用于跟踪眼睛位置和定向,确定凝视角
度和会聚角度等的眼睛跟踪系统1214(图12b)、用于确定hmd 1200在3d空间中的位置和定向的imu 1210、用于捕获外部环境的dca 1211、用于独立确定hmd 1200的位置的位置传感器1212、以及用于向用户显示ar/vr内容的显示系统1280。显示系统1280包括(图12b)电子显示器1225,例如但不限于液晶显示器(lcd)、有机发光显示器(oled)、无机发光显示器(iled)、有源矩阵有机发光二极管(amoled)显示器、透明有机发光二极管(toled)显示器、投影仪或其组合。显示系统1280还包括光学块1230,其功能是将电子显示器1225产生的图像传送给用户的眼睛。光学块可以包括各种透镜(例如折射透镜、菲涅耳透镜、衍射透镜、有源或无源pancharatnam
‑
berry相位(pbp)透镜、液体透镜、液晶透镜等)、光瞳复制波导、光栅结构、涂层等。显示系统1280可以进一步包括变焦模块1235,其可以是光学块1230的一部分。变焦模块1235的功能是调节光学块1230的焦点,以例如补偿视觉辐辏调节冲突(vergence
‑
accommodation conflict)、校正特定用户的视觉缺陷、抵消光学块1230的像差等。
87.i/o接口1215是允许用户发送动作请求并从控制台1290接收响应的设备。动作请求是执行特定动作的请求。例如,动作请求可以是开始或结束图像或视频数据的捕获的指令,或者是在应用内执行特定动作的指令。i/o接口1215可以包括一个或更多个输入设备,例如键盘、鼠标、游戏控制器或用于接收动作请求并将动作请求传送到控制台1290的任何其他合适的设备。由i/o接口1215接收的动作请求被传送到控制台1290,控制台1290执行对应于动作请求的动作。在一些实施例中,i/o接口1215包括imu,其捕获指示相对于i/o接口1215的初始位置的i/o接口1215的估计位置的校准数据。在一些实施例中,i/o接口1215可以根据从控制台1290接收的指令来向用户提供触觉反馈。例如,当动作请求被接收到时,或者当控制台1290向i/o接口1215传送指令——所述指令使i/o接口1215在控制台1290执行动作时生成触觉反馈——时,触觉反馈可以被提供。
88.控制台1290可以向hmd 1200提供内容,以根据从imu 1210、dca 1212、眼睛跟踪系统1214和i/o接口1215中的一个或更多个接收的信息进行处理。在图12b所示的示例中,控制台1290包括应用储存器1255、跟踪模块1260和处理模块1265。控制台1290的一些实施例可以具有不同于结合图12b描述的模块或部件的模块或部件。类似地,下面进一步描述的功能可以以不同于结合图12a和图12b描述的方式分布在控制台1290的部件当中。
89.应用储存器1255可以存储一个或更多个由控制台1290执行的应用。应用是一组指令,该组指令当由处理器执行时生成用于显现给用户的内容。由应用生成的内容可以响应于经由hmd 1200的移动或i/o接口1215而从用户接收的输入。应用的例子包括:游戏应用、演示和会议应用、视频回放应用或其他合适的应用。
90.跟踪模块1260可以使用一个或更多个校准参数来校准ar/vr系统1250,并且可以调整一个或更多个校准参数以减少hmd 1200或i/o接口1215的位置确定中的误差。由跟踪模块1260执行的校准还考虑了从hmd 1200中的imu 1210和/或被包括在i/o接口1215中的imu(如果有的话)接收的信息。另外,如果hmd 1200的跟踪丢失,则跟踪模块1260可以重新校准ar/vr系统1250的部分或全部。
91.跟踪模块1260可以跟踪hmd 1200或i/o接口1215的移动、imu 1210或其某种组合。例如,跟踪模块1260可基于来自hmd 1200的信息来确定hmd 1200的参考点在局部区域的映射中的位置。跟踪模块1260也可以分别地使用来自imu 1210的指示hmd 1200的位置的数据
或者使用来自被包括在i/o接口1215中的imu的指示i/o接口1215的位置的数据,来确定hmd 1200的参考点或者i/o接口1215的参考点的位置。此外,在一些实施例中,跟踪模块1260可以使用来自imu 1210的指示hmd 1200的位置的数据部分以及来自dca 1212的局部区域的表示来预测hmd 1200的未来定位。跟踪模块1260向处理模块1265提供hmd 1200或i/o接口1215的估计的或预测的未来位置。
92.处理模块1265可以基于从hmd 1200接收的信息生成围绕hmd 1200的部分或全部的区域(“局部区域”)的3d映射。在一些实施例中,处理模块1265基于从dca 1211接收的与在计算深度时使用的技术相关的信息来确定用于局部区域的3d映射的深度信息。在各种实施例中,处理模块1265可以使用深度信息来更新局部区域的模型,并且部分地基于更新的模型来生成内容。
93.处理模块1265在ar/vr系统1250内执行应用,并从跟踪模块1260接收hmd 1200的位置信息、加速度信息、速度信息、所预测的未来位置或其某种组合。基于接收到的信息,处理模块1265确定要提供给hmd 1200用于向用户呈现的内容。例如,如果接收到的信息指示用户已经向左看,则处理模块1265为hmd 1200生成反映(mirror)用户在虚拟环境中或在用附加内容增强局部区域的环境中的移动的内容。另外,处理模块1265响应于从i/o接口1215接收的动作请求来执行在控制台1290上执行的应用内的动作,并且向用户提供动作被执行的反馈。所提供的反馈可以是经由hmd 1200的视觉或听觉反馈或者经由i/o接口1215的触觉反馈。
94.在一些实施例中,基于从眼睛跟踪系统1214接收的眼睛跟踪信息(例如,用户眼睛的定向),处理模块1265确定提供给hmd 1200用于在电子显示器1225上呈现给用户的内容的分辨率。处理模块1265可以向hmd 1200提供内容,该内容在电子显示器1225上在用户凝视的中央凹区(foveal region)中具有最大像素分辨率。处理模块1265可以在电子显示器1225的其他区域中提供较低的像素分辨率,从而减少ar/vr系统1250的功耗并节省控制台1290的计算资源,而不会损害用户的视觉体验。在一些实施例中,处理模块1265可以进一步使用眼睛跟踪信息来调整对象在电子显示器1225上的显示位置,以防止视觉辐辏调节冲突和/或抵消光学失真和像差。
95.用于实现结合本文所公开的方面描述的各种说明性逻辑、逻辑块、模块和电路的硬件可以用被设计成执行本文所述功能的通用处理器、数字信号处理器(dsp)、专用集成电路(asic)、现场可编程门阵列(fpga)或其他可编程逻辑器件、分立门(discrete gate)或晶体管逻辑、分立硬件部件或它们的任意组合来实现或执行。通用处理器可以是微处理器,但是替代地,处理器可以是任何传统的处理器、控制器、微控制器或状态机。处理器也可以被实现为计算设备的组合,例如,dsp和微处理器的组合、多个微处理器、与dsp内核结合的一个或更多个微处理器、或者任何其他这样的配置。替代地,一些步骤或方法可以由特定于给定功能的电路来执行。
96.本公开的范围不受本文描述的具体实施例的限制。实际上,根据前面的描述和附图,除了本文描述的那些实施例和修改之外,其他各种实施例和修改对于本领域普通技术人员来说将是明显的。因此,这样的其他实施例和修改旨在落入本公开的范围内。此外,尽管在本文已经在用于特定目的特定环境中在特定实现的上下文中描述了本公开,但是本领域的普通技术人员将认识到其有用性不限于此,并且本公开可以有益地在任何数量的环境
中为了任何数量的目的而实现。相应地,所阐述的权利要求应该根据本文描述的本公开的全部宽度和精神来解释。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。