1.本发明属于植物授粉技术领域,特别涉及一种自动授粉的控制方法、控制装置及设备。
背景技术:
2.向日葵是异花授粉作物,自花结实率极低。目前,向日葵授粉都是人工授粉,人工授粉可以提高结实率,显著增加产量。授粉时间应在向日葵进入开花期(全田70%植株开花)后2~3天,进行第1次人工辅助授粉,以后每隔3天授粉1次,共授粉2~3次。人工授粉方法有两种。1.粉扑授粉。用一只手握住向日葵的花盘颈,另一只手用软布和棉花制成的粉扑的正面轻轻接触花盘,使花粉粒黏在粉扑上,然后将粉扑用同样的方法轻轻接触另一花盘,依次擦下去,进而达到授粉目的。2.花盘接触授粉,即在相邻的两行间,于开花期间用手逐对将花盘相互轻按几下,以达到授粉目的;
3.可见,对于向日葵的人工授粉,利用粉扑授粉和花盘接触授粉的方式,存在授粉效率低,且人工成本比较高的技术问题;
4.也即,在向日葵的人工授粉技术中,如何提高授粉效率,降低人工授粉的成本,是本领域亟需解决的技术难题。
技术实现要素:
5.本发明所要解决的技术问题是如何提供一种自动授粉的控制方法、控制装置及设备,以至少解决上述部分技术问题。
6.为至少解决上述部分技术问题,第一方面,本发明提供了一种自动授粉的控制方法,所述控制方法用于对特定区域内的向日葵进行花盘接触授粉,所述方法包括:获取目标物的图像信息,并将获取的所述目标物的图像信息与标识向日葵花盘的图像信息比对,若所述目标物的图像信息与所述向日葵花盘的图像信息一致,则判定所述目标物为需要授粉的向日葵的花盘,若所述目标物的图像信息与所述向日葵花盘的图像信息不一致,则判定所述目标物不是需要授粉的向日葵的花盘;选取两个被判定为需要授粉的向日葵的花盘,并将所述两个需要授粉的向日葵的花盘相接触实现授粉。
7.在第一方面中,在所述获取目标物的图像信息之前,所述方法还包括:获取所述标识向日葵中用于标识需要授粉的向日葵花盘的图像特征;通过卷积神经网络对所述用于标识需要授粉的向日葵花盘的图像数据进行训练;依据训练结果获得用于标识需要授粉的向日葵花盘的图像模型;所述将获取的所述目标物的图像信息与标识向日葵花盘的图像信息比对包括:将获取的所述目标物的图像信息与所述用于标识需要授粉的向日葵花盘的图像模型进行比对。
8.在第一方面中,所述获取目标物的图像信息包括:获取所述特定区域内的3d电子地图;依据所述3d电子地图获取所有所述向日葵的位置坐标;并依据所述位置坐标选取所述目标物。
9.第二方面,本发明提供了一种自动授粉的控制装置,所述装置包括:识别模块、控制模块和执行模块;所述识别模块用于获取目标物的图像信息,并将获取的所述目标物的图像信息发送至所述控制模块,所述控制模块将接收的目标物的图像信息与标识向日葵花盘的图像信息比对,若所述目标物的图像信息与所述向日葵花盘的图像信息一致,则判定所述目标物为需要授粉的向日葵的花盘,若所述目标物的图像信息与所述向日葵花盘的图像信息不一致,则判定所述目标物不是需要授粉的向日葵的花盘;
10.所述执行模块用于选取两个被判定为需要授粉的向日葵的花盘,并将所述两个需要授粉的向日葵的花盘相接触实现授粉。
11.在第二方面中,所述装置还包括:卷积神经网络学习模块,所述卷积神经网络学习模块用于获取所述标识向日葵中用于标识需要授粉的向日葵花盘的图像特征;通过卷积神经网络对所述用于标识需要授粉的向日葵花盘的图像数据进行训练;依据训练结果获得用于标识需要授粉的向日葵花盘的图像模型;所述将获取的所述目标物的图像信息与标识向日葵花盘的图像信息比对包括:将获取的所述目标物的图像信息与所述用于标识需要授粉的向日葵花盘的图像模型进行比对。
12.在第二方面中,所述控制模块还用于:获取所述特定区域内的3d电子地图,依据所述3d电子地图获取所有所述向日葵的位置坐标,并依据所述位置坐标选取所述目标物。
13.第三方面,本发明提供了一种装置,所述装置包括:一对机架、至少一对柔性夹爪、一对机械臂、一对摄像头、移动底盘和处理器;所述机械臂、所述机架和所述处理器均设置在所述移动底盘上,所述柔性夹爪均和所述机械臂连接,并形成一体结构;所述摄像头安置在所述机架上,所述摄像头用于识别向日葵的花盘的图像信息,并将图像信息传输至所述处理器;所述处理器用于接收所述摄像头传输的所述图像信息,并判断所接收的所述图像信息是否为所述向日葵的花盘,若是,则控制至少一对所述柔性夹爪抓取相邻两向日葵的花盘,使该相邻两所述向日葵的花盘进行接触。
14.在第三方面中,每一所述柔性夹爪均通过一机械臂连接在所述机架上,所述柔性夹爪包括:至少三个气囊,三个所述气囊之间形成夹取空间,每一所述气囊上均设置有充气孔,其中通过充气孔对所述气囊充气以控制所述夹取空间的抓紧,通过充气孔使所述气囊泄气以控制所述夹取空间的放开。
15.在第三方面中,每一所述气囊均为月牙形状的弧形,所述气囊的正面为内弧面,所述气囊的背面为外弧面,且所述气囊的背面设置有与气囊连通的扩充囊。
16.在第三方面中,所述柔性夹爪与所述机械臂的连接位置设置有调节盘,所述调节盘包括:至少三个调节片,三个所述调节片的一端交汇设置,且三个所述调节片之间呈夹角设置,每一所述调节片的中部均设置有调节槽,所述调节槽的设置方向与所述调节片的长度方向相一致,每一所述调节片的调节槽内均设置一所述气囊,所述气囊可在所述调节槽内进行自由调节以适应不同大小的抓取物体。
17.有益效果:
18.本发明提供的一种自动授粉的控制方法,该方法用于对特定区域内的向日葵进行授粉,在实施时,先获取目标物的图像信息;并将获取的目标物的图像信息与标识向日葵花盘的图像信息相比对,若所述目标物的图像信息与所述向日葵花盘的图像信息一致,则判定所述目标物为需要授粉的向日葵的花盘,若所述目标物的图像信息与所述向日葵花盘的
图像信息不一致,则判定所述目标物不是需要授粉的向日葵的花盘;然后,选取两个被判定为需要授粉的向日葵的花盘,并将所述两个需要授粉的向日葵的花盘相接触实现授粉,通过该方法达到对特定区域内的向日葵的花盘进行授粉的技术目的。
19.上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上述和其它目的、特征和优点能够更明显易懂,以下特举本发明的具体实施方式。
附图说明
20.为了更清楚地说明本说明书实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
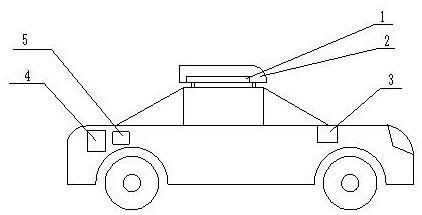
21.图1为本实施例三提供的设备的结构示意图;
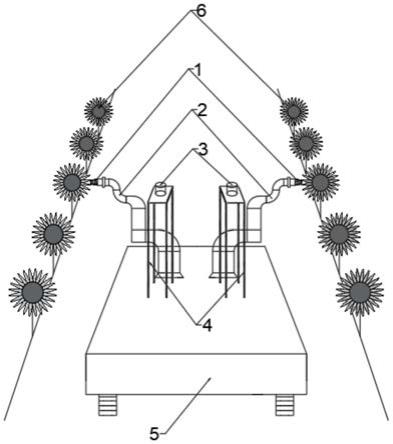
22.图2为本实施例三提供的柔性夹爪的结构示意图;
23.附图标记:
24.1.柔性夹爪;
25.2.机械臂;
26.3.摄像头;
27.4.机架;
28.5.移动底盘;
29.6.向日葵的花盘;
30.7.气囊;
31.8.扩充囊。
具体实施方式
32.下面将结合本说明书实施例中的附图,对本说明书实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本说明书一部分实施例,而不是全部的实施例。基于本说明书中的实施例,本领域普通技术人员所获得的所有其他实施例,都属于本发明保护的范围。
33.同时,本说明书实施例中,当组件被称为“固定于”另一个组件,它可以直接在另一个组件上或者也可以存在居中组件。当一个组件被认为是“连接”另一个组件,它可以是直接连接到另一个组件或者可能同时存在居中组件。当一个组件被认为是“设置于”另一个组件,它可以是直接设置在另一个组件上或者可能同时存在居中组件。本说明书实施例中所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明目的,并不是旨在限制本发明。
34.实施例一
35.请参阅图1,本说明书实施例提供的自动授粉的控制方法,其用于对特定区域内的向日葵进行授粉。该方法包括:先获取目标物的图像信息,并将获取的所述目标物的图像信息与标识向日葵花盘的图像信息比对,若所述目标物的图像信息与所述向日葵花盘的图像
信息一致,则判定所述目标物为需要授粉的向日葵的花盘,若所述目标物的图像信息与所述向日葵花盘的图像信息不一致,则判定所述目标物不是需要授粉的向日葵的花盘;选取两个被判定为需要授粉的向日葵的花盘,并将所述两个需要授粉的向日葵的花盘相接触实现授粉。
36.在实施上述技术方案时,先获取目标物的图像信息;然后将获取的目标物的图像信息与标识向日葵花盘的图像信息相比对,若所述目标物的图像信息与所述向日葵花盘的图像信息一致,则判定所述目标物为需要授粉的向日葵的花盘,若所述目标物的图像信息与所述向日葵花盘的图像信息不一致,则判定所述目标物不是需要授粉的向日葵的花盘;需要说明的是,向日葵是异花授粉,需要通过将不同植株的花粉进行接触授粉,所以当需要授粉时,选取两个被判定为需要授粉的向日葵的花盘,并将所述两个需要授粉的向日葵的花盘相接触,这样就使得两个花盘上的花粉相互接触,进而达到实现对向日葵的花盘进行授粉的技术目的。
37.具体而言,在获取目标物的图像信息之前,还需要获取标识向日葵中用于标识需要授粉的向日葵的图像特征,具体通过卷积神经网络对所述用于标识需要授粉的向日葵花盘的图像数据进行训练;然后依据训练结果获得用于标识需要授粉的向日葵花盘的图像模型;最后将获取的目标物的图像信息与所述用于标识需要授粉的向日葵花盘的图像模型进行比对,进而判断获取的目标物的图像信息是否与标识向日葵花盘的图像信息相一致,若是,则判定所述目标物为需要授粉的向日葵的花盘,若否,则判定所述目标物不是需要授粉的向日葵的花盘。
38.而作为获取目标物的图像信息的一种实现方式包括:先获取所述特定区域内的3d电子地图;然后在依据所述3d电子地图获取所有所述向日葵的位置坐标;最后,依据所述位置坐标选取所述目标物,需要说明的是,3d电子地图的获取技术是一种比较成熟的现有技术,本发明将不在赘述。
39.实施例二:
40.本实施例二提供了一种自动授粉的控制装置,所述装置包括:识别模块、控制模块和执行模块;所述识别模块用于获取目标物的图像信息,并将获取的所述目标物的图像信息发送至所述控制模块,所述控制模块将接收的目标物的图像信息与标识向日葵花盘的图像信息比对,若所述目标物的图像信息与所述向日葵花盘的图像信息一致,则判定所述目标物为需要授粉的向日葵的花盘,若所述目标物的图像信息与所述向日葵花盘的图像信息不一致,则判定所述目标物不是需要授粉的向日葵的花盘;所述执行模块用于选取两个被判定为需要授粉的向日葵的花盘,并将所述两个需要授粉的向日葵的花盘相接触实现授粉
41.在实施本发明的实施例二的技术方案时,先通过识别模块获取目标物的图像信息;然后将获取信息发送至控制模块,控制模块接收到信息后,将获取的目标物的图像信息与标识向日葵花盘的图像信息相比对,若所述目标物的图像信息与所述向日葵花盘的图像信息一致,则判定所述目标物为需要授粉的向日葵的花盘,若所述目标物的图像信息与所述向日葵花盘的图像信息不一致,则判定所述目标物不是需要授粉的向日葵的花盘;需要说明的是,向日葵是异花授粉,需要通过将不同植株的花粉进行接触授粉,所以当需要授粉时,控制模块控制执行模块选取两个被判定为需要授粉的向日葵的花盘,并将所述两个需要授粉的向日葵的花盘相接触,这样就使得两个花盘上的花粉相互接触,进而达到实现对
向日葵的花盘进行授粉的技术目的。
42.具体而言,装置在实现获取目标物的图像信息的步骤之前,还需要提前学习向日葵花盘的图像信息,并将训练好的向日葵花盘的图像信息储存在控制模块内,本实施例提供一种卷积神经网络学习模块,所述卷积神经网络学习模块用于获取所述标识向日葵中用于标识需要授粉的向日葵花盘的图像特征,卷积神经网络通过对所述用于标识需要授粉的向日葵花盘的图像数据进行训练,依据训练结果获得用于标识需要授粉的向日葵花盘的图像模型;最后,将获取的所述目标物的图像信息与所述用于标识需要授粉的向日葵的图像模型进行比对,进而判断目标物的图像是否为需要授粉的向日葵的花盘。
43.基于上述实施例二中,针对于特定区域内的向日葵的花盘进行授粉,可以理解,特定区域,可以特指向日葵田,或者向日葵种植比较密集的区域内,基于此,本实施例提出一种通过控制模块获取特定区域内的3d电子地图的技术方案,解决了本发明的装置在对需要授粉的向日葵进行筛选时的精准定位问题,在实施时,依据3d电子地图获取所有向日葵的位置坐标,然后依据所述位置坐标选取所述目标物。
44.实施例三:
45.本发明的实施例三提供了一种设备,所述设备包括:一对机械臂2、一对机架4、至少一对柔性夹爪1、一对摄像头3、移动底盘5和处理器;所述机械臂2、所述柔性夹爪1、所述摄像头3、所述机架4和所述处理器均设置在所述移动底盘5上,并形成一体结构;所述摄像头3用于获取目标物的图像信息,并将图像信息传输至所述处理器,需要说明的是摄像头3作为一种图像采集工具,不限于摄像头3单体部件,也可以包含其他能够实现摄像采集功能的工具,例如腕部相机、数码相机、带夜视功能的相机等等;所述处理器用于接收所述摄像头3传输的所述图像信息,并判断所接收的所述图像信息是否为所述向日葵的花盘6,若是,则控制至少一对所述柔性夹爪1抓取相邻两向日葵的花盘6,使该相邻两所述向日葵的花盘6进行接触;所述机架4设置在所述移动底盘5的上部,移动底盘与处理器连接,处理器控制移动底盘朝预设方向行走。
46.而作为柔性夹爪1的一种实现方式,并且柔性夹爪1在抓取向日葵的花盘6时需要保持对向日葵花盘的保护,所以本实施例提出了一种技术方案,请参阅图2,该方案为:每一个柔性夹爪1均包括至少三个气囊7,三个所述气囊7之间形成夹取空间,用于夹取向日葵的花盘6,每一所述气囊7上均设置有充气孔,通过充气孔对所述气囊7充气以控制所述夹取空间的抓紧,通过充气孔使所述气囊7泄气以控制所述夹取空间的放开。充气孔可以通过气管连通外部的充气装置或者设置在本发明的设备内部的充气机构。
47.而作为柔性夹爪1的又一种实现方式,每一所述气囊7均为月牙形状的弧形,所述气囊7的正面为内弧面,所述气囊7的背面为外弧面,且所述气囊7的背面设置有与气囊7连通的扩充囊8,所有内弧面形成夹取空间,当气囊7内正常充满气时,夹取空间内夹持住向日葵的花盘6,当需要打开夹取空间时,从气囊7内抽气,当抽气时,外弧面上的扩充囊8缩气,此时,背面的压力小于正面的压力,所以气囊7朝向夹取空间相反方向张开,以打开夹取空间,进而松开向日葵的花盘6。
48.为了更进一步调节柔性夹爪1的夹取空间,以适应不同尺寸花盘的夹取需求,本实施例三提供了一种技术方案,该方案包括,在柔性夹爪1与所述机械臂的连接位置设置一调节盘,通过调节盘调节柔性夹爪1的初始夹取空间的夹取容量,该调节盘具体包括:至少三
个调节片,三个所述调节片的一端交汇设置,且三个所述调节片之间呈夹角设置,每一所述调节片的中部均设置有调节槽,所述调节槽的设置方向与所述调节片的长度方向相一致,每一所述调节片的调节槽内均设置一所述气囊7,所述气囊7可在所述调节槽的进行自由调节,这样就使得,夹取空间的初始夹取容量可以根据特定区域内大部分向日葵的花盘6的尺寸进行调节,进而实现更精准的夹取效果。
49.最后所应说明的是,以上具体实施方式仅用以说明本发明的技术方案而非限制,尽管参照实例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的精神和范围,其均应涵盖在本发明的权利要求范围当中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。